基于三维点云模型的拱桥空间形态识别与分析
2022-08-09李刚张宏伟许剑飞熊文
李刚,张宏伟,许剑飞,熊文
(1.安徽省交通控股集团有限公司,安徽 合肥 230088;2.东南大学 交通学院 桥梁工程系,江苏 南京 211189)
常规的拱桥变形监测手段主要包括全站仪测量法、连通管测量法及GPS测量法等。全站仪利用三角高程测量原理对拱肋上单点高差进行计算,得到拱肋变形。连通管测量法基于连通管的物理原理,根据安装于桥梁上基点和测量点连通管液位差获取拱肋变形。GPS测量法利用GPS测量观测点与基站点间的空间位置变化,确定桥梁某点的变形值。前2种测量方法原理简单,单点精度高,但都需在拱肋上设置相关装置,效率较低,可操作性不强,对多孔跨水拱桥的实现难度大。GPS测量法操作简单,适用于拱肋变形的长期监测,但精度难以保证,同时成本较高,测量过程易受天气影响。该文介绍一种基于三维激光扫描技术的拱桥变形监测方法,采用三维激光扫描仪在2个不同时间点对一座六孔连拱拱桥进行扫描测试,获取2种不同状态下桥梁点云模型,从点云数据中分析得到拱肋的空间形态变化。
1 三维点云模型简介
三维激光扫描技术是一种高自动化、全视角化和高精度化的空间扫描技术,其实现主体为高精度三维激光扫描仪,该设备由激光测距系统、激光扫描系统及支架系统构成,其工作原理见图1。
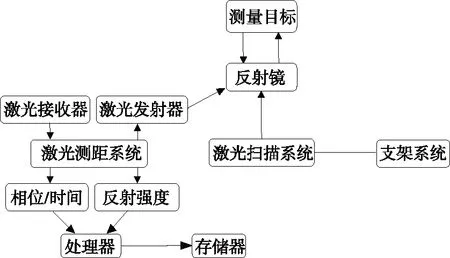
图1 三维激光扫描仪工作原理示意图
三维激光扫描技术使用三维激光扫描仪向目标表面发射并接收高密度、高强度的激光束,同时利用设备内部激光测距系统计算每条激光束的水平角度α、垂直角度θ及目标物体表面扫描点至仪器的距离S,得到扫描点的局部空间三维坐标,将这些坐标以可视化单点的形式分布于三维空间内,即可构造出目标物体的空间三维点云模型(见图2),模型中海量点集可反映目标表面任意位置处的空间坐标信息。

图2 点云模型与单点空间坐标信息
对于结构较复杂或体量较庞大的桥梁等被测物体,仅设置单个测站一般无法覆盖其完整表面,需通过多站拼接组合才能获取完整的目标物点云。在点云数据拼接时,需根据测站间重合部分的坐标进行坐标变换,从而将多测站数据统一到同一个坐标系统中(见图3)。
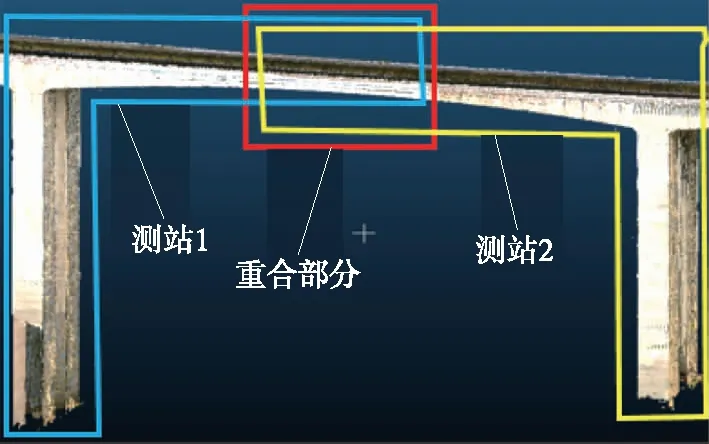
图3 完整桥梁点云模型
利用三维点云模型,可实现点坐标查询、构件几何特征提取、距离测量、变形监测等,在桥梁检测与运营状态评估中被广泛应用。
2 依托工程与数据采集
2.1 工程概况
江西省上饶市某座六孔连拱拱桥全长267.852 m,桥面总宽12.5 m,桥梁跨径为6×42.5 m。上部结构为六孔等截面悬链线桁架拱桥,拱架结构为钢筋混凝土无铰桁架拱桥,下部结构为扩大基础配重力式桥墩及U形桥台。全桥立面见图4,由于桥梁为对称结构,仅展示三孔。
检测中发现该桥上部结构存在一定程度病害,于2010年对其进行一次加固拓宽,拓宽提载设计荷载等级为公路-Ⅰ级,桥面净宽为净-9.0 m+2×1.5 m人行道;2019年3月再次进行加固。
2.2 现场数据采集
在不同时间点使用三维激光扫描仪对同一目标桥梁进行点云数据采集,是三维激光扫描技术应用于桥梁变形监测的重要步骤。分别于2020年4月、2020年10月对该桥进行三维激光扫描。前后两次测量均使用Leica公司生产的P50型三维激光扫描仪。该扫描仪为目前世界上精度最高、测距最大的激光扫描设备,具有1 km以上量程及最高1.2 mm的精度,具备360°水平测量角度与290°竖向测量角度,适用于多种环境。
图5为被测拱桥实景。该桥属于跨水桥梁,虽然受仪器布置条件限制无法在水上设站,但利用三维激光扫描仪“所见即所得”的工作特点,只需保证扫描仪与被测桥梁部分相互通视,即可完整获取目标物的点云数据。根据该原则,测量时将测站设置于桥梁两岸近处的4个对称角点处,设置合适的水平扫描范围角确保将被测桥梁表面完全覆盖(见图6)。这种测站布置方式可充分利用扫描仪远距离测量能力,并使各测站间的点云数据存在足够重合部分,从而得到完整度较高的桥梁点云模型。

图6 测站平面布置示意图
现场测量人员按照上述测站布置方案在某一角点将扫描仪固定后,对扫描参数进行调试,调试内容主要为扫描量程及扫描角度等(见图7),确保数据收集的完整性。

图7 仪器布置与调试
3 数字建模与形态分析
3.1 点云模型构建
对采集得到的四站数据使用扫描仪适配的前处理软件Cyclone进行拼接处理,将多个不完整的单站点云数据集成为整体桥梁点云。常见拼接方法有基于公共标靶的拼接及基于点云的视图拼接。由于这次测量各测站位置间隔较远,已超出扫描仪对标靶的捕获范围,利用各站间的重合部分对点云进行水平平面与竖直平面的视图拼接。拼接过程及拼接完成后桥梁点云见图8、图9。
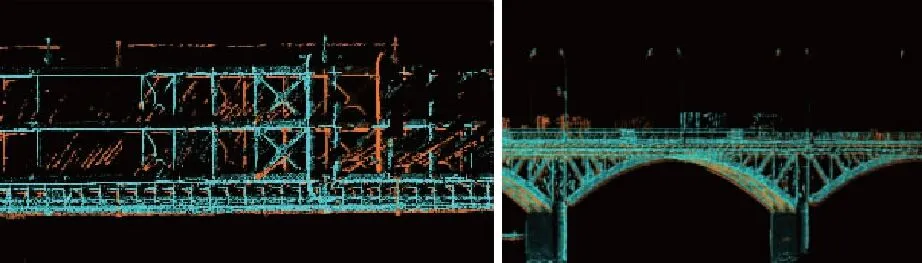
图8 水平与竖直平面的视图拼接
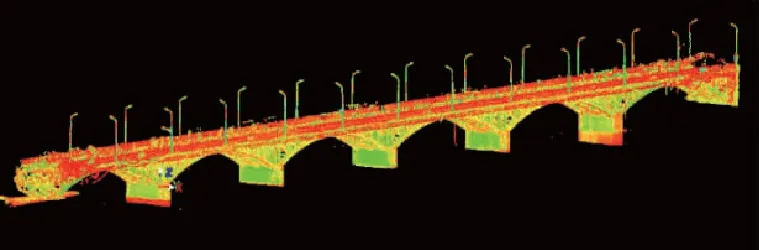
图9 拼接后的完整桥梁点云
即使扫描仪系统内部原点位置与仪器自身始终保持相对不动,但由于实际测量中无法保证仪器架设位置、高度等参数一致,每次扫描获取的点云数据处于不同坐标系之下,无法对2个点云数据中的对应点进行坐标比较,需将2次点云进行坐标系统一,实现3个维度上的坐标对齐。
Z坐标代表点云整体高度,只需在两点云中确定同一位置某点的高度即可实现Z坐标的对齐。考虑到2次扫描间隔时间较短,认为拱桥第一孔两侧墩柱几乎不发生竖向沉降。由于该桥靠岸侧墩柱被土层覆盖,选择第一孔靠水侧墩柱上角点作为Z坐标对齐的基准点(见图10)。
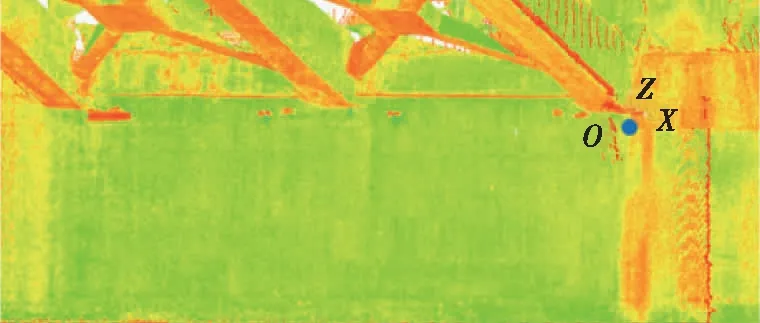
图10 基准点与坐标原点
前次初始点云数据中该角点Z坐标值z1为3.152 m,后次初始点云数据中该角点Z坐标值z2为3.985 m,只需将后次点云数据在Z坐标轴整体向下平移z2-z1=0.833 m,即可完成两者高度坐标的统一。为方便后续数据处理,将两点云中该基准点确定为坐标原点O(见图11)。

图11 点云Z方向整体对齐及坐标原点确定
完成高度对齐后,2次点云数据的X、Y轴是否重合将决定后续选取测点纵桥向位置的一致性。使用消除桥梁表面水平线段与当前坐标轴夹角的方法实现二者水平面坐标轴的重合。同样选取边孔靠岸侧墩柱作为参照,截取其表面平面上一定高度的水平线,计算该线段与当前坐标系下X轴或Y轴的夹角α(见图12)。将点云整体绕原点平面转动角度α,新点云中墩柱法向量即与平面坐标轴完成重合(见图13)。对2个点云重复上述操作,两者X、Y轴即可实现重合。

图12 墩柱表面水平线选取

图13 点云与坐标轴对齐
3.2 空间形态分析
坐标系3个维度的统一实现了3个点云数据的可比性。选择每孔拱肋底板两侧边线上多个测点对拱桥的空间形态进行分析,根据测点竖向坐标与横桥向坐标的变化分别判断拱肋在竖向与横桥向的空间变形情况。为选取足够的测点数量以保证分析结果的准确性,测点纵桥向间距取为2 m(见图14)。
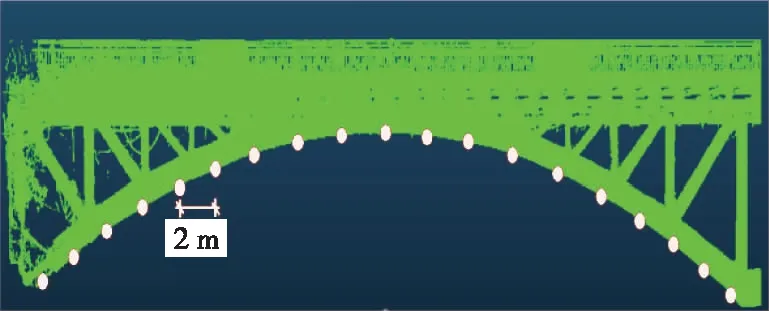
图14 拱肋测点选取
从总体角度分析前后2个时间点拱肋竖向空间变形状态,选取2次数据中上游侧拱肋底面外侧所有测点高程,制作拱肋线形图(见图15)。从图15可看出:整体上2次测量得到的拱轴线线形较平顺,线形曲线未出现局部畸变,且2条曲线重合度较高,各测点的竖向坐标无明显差异,拱肋竖直方向整体无显著变形。
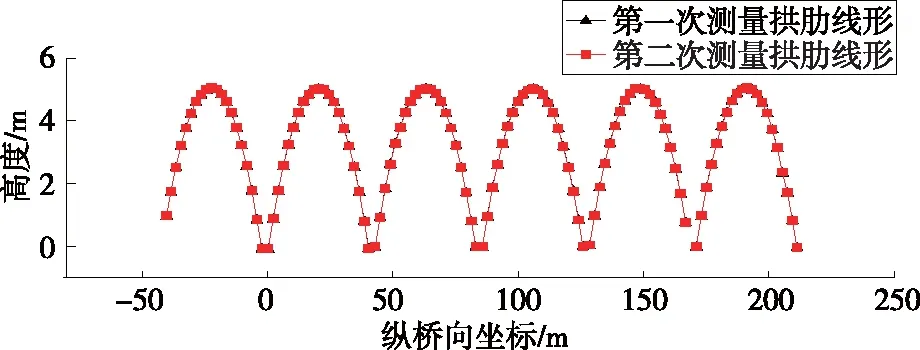
图15 拱肋线形图
计算2次点云数据中对应点高程坐标差,通过差值分析拱肋整体及局部在竖向上的空间变化。限于篇幅,仅列出第一孔、第三孔上游侧拱肋对应测点高程差值(见表1、表2)。

表1 拱桥第一孔上游侧拱肋测点高程差值 (第二次测量高程-第一次测量高程)
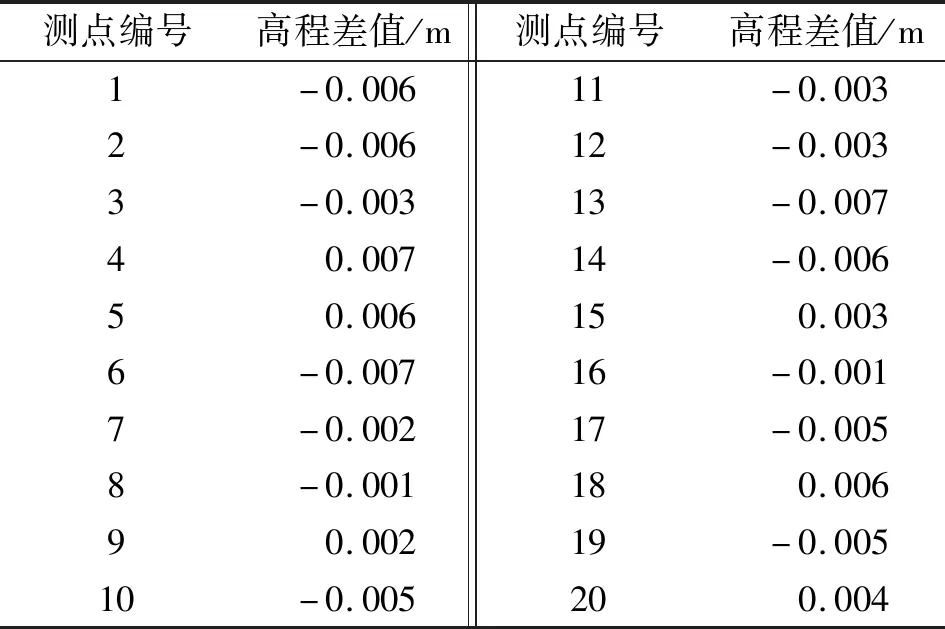
表2 拱桥第三孔上游侧拱肋测点高程差值 (第二次测量高程-第一次测量高程)
从表1可看出:第一孔上游侧拱肋前10个测点的高程差值大部分为负值,而后10个测点的差值大部分为正值,据此判断该拱肋在该段时间内的空间变形为绕其顶点转动(见图16)。由于各测点间差值很小,该空间转角几乎可忽略不计,仍可认为该孔拱肋处于低水平变形的稳定状态。
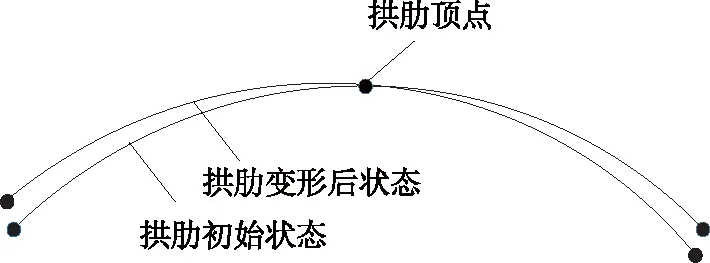
图16 拱肋竖向转动示意图
从表2可看出:第三孔上游侧拱肋测点的高程差值大部分为负值,说明后次拱肋点云较前次拱肋点云出现整体下沉,所有测点平均下沉量为0.001 6 m。分别计算前10个测点与后10个测点的平均沉降量,两者差值很小,判断该拱肋在下沉过程中并未伴随竖向扭转,拱肋等效空间变形见图17。由于平均下沉量很小,可认为第三孔拱肋几乎未发生空间变形,仍处于安全状态。
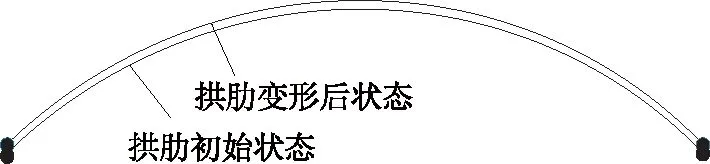
图17 拱肋竖向下沉示意图
拱肋结构在荷载作用下的空间变形除整体下沉或转动外,其自身可能产生扭转。可通过拱肋内外对应测点间高差判断拱肋是否发生空间扭转。表3为第三孔上游侧拱肋底面外侧及内侧同一纵向位置测点的高程差值。从表3可看出:各对应测点间高程差值很小,整体上外侧曲线略高于内侧曲线,可认为2条曲线处于空间平行状态(见图18),据此判断该拱肋未发生空间扭转现象。

表3 拱桥第三孔上游侧拱肋对应测点高程差值 (内侧测点高程-外侧测点高程)

图18 拱肋底板内外侧曲线
其余拱肋空间变形情况与第一孔或第三孔类似,不再赘述。根据分析结果,该拱桥各拱肋的变形量均较小,可认为该拱桥在该段时间内未发生明显空间形态变化,暂不需采取加固检修措施。
4 结论
(1) 根据全桥测点线形图,该拱桥六孔拱肋总体线形平顺度较好,未出现明显局部空间变形;2个时间点拱肋曲线间总体重合较好,未出现明显整体空间变形。
(2) 根据纵桥向多测点竖向坐标对比结果,该段时间内拱桥部分拱肋出现微小下沉及转动,但变形量均很小。同时根据拱肋底板内外侧测点间高程对比结果,拱肋未发生明显空间扭转。该桥拱肋几乎未发生空间形态变化,从位移层面可认为桥梁上部承力结构处于安全状态。
(3) 采用三维激光扫描技术进行拱桥变形监测,从点云数据中获取的测点坐标具有密度大、精度高的特点,且测量快速、便捷,无需耗费大量人力、物力,相较于传统检测方法更高效、准确,在桥梁监测领域具有良好的实用价值和应用前景。
