达芬奇机器人与腹腔镜在儿童肠重复畸形切除术中的应用对比研究
2022-08-08金益陈青江章跃滨蔡多特陈肯罗文娟黄宗伟胡迪张书豪温李平高志刚
金益 陈青江 章跃滨 蔡多特 陈肯 罗文娟 黄宗伟 胡迪 张书豪 温李平 高志刚
浙江大学医学院附属儿童医院普外科,国家儿童健康与疾病临床医学研究中心,浙江省腹腔脏器微创诊治临床医学研究中心,杭州 310053
肠重复畸形是一种儿童少见的先天性消化道疾病,是小肠近系膜侧出现的圆形或管状空腔脏器,以回肠最为常见,可见于任何年龄[1]。临床可表现为消化道出血、肠梗阻、腹痛等,部分患儿无明显症状,而在行其他手术时被发现[2]。自2000年Schleef等[3]首次报道使用腹腔镜治疗肠重复畸形以来,腹腔镜手术已成为治疗肠重复畸形的主要方式[4]。达芬奇机器人手术系统和传统腹腔镜相比,具有消除手颤抖、设定动作比例和动作指标化功能;同时,该系统具有3D成像功能以及更高的分辨率和放大倍数,机械臂可多自由度旋转,极大地提高了手术操作的稳定性、精确性[5]。目前国内已有多家医院配备达芬奇机器人手术系统,在小儿外科领域,已对胆总管囊肿、先天性巨结肠等多种疾病开展机器人手术且效果满意。本研究以肠重复畸形患儿为研究对象,对比达芬奇机器人与腹腔镜在儿童肠重复畸形切除术的应用特点[6-7]。
材料与方法
一、临床资料
回顾性分析2020年4月至2021年12月就诊于浙江大学医学院附属儿童医院并行手术治疗的肠重复畸形患儿临床资料。对既往有腹部手术史,或因急腹症行急诊手术的病例予以剔除。由主刀医师对患儿监护人进行宣教后,监护人自行选择手术方式。最终共纳入44例患儿,依据手术方式的不同分为达芬奇手术组(n=14)和腹腔镜手术组(n=30),两组患儿在性别、年龄、体重等方面比较,差异无统计学意义(P>0.05),见表1。达芬奇手术由已获得达芬奇手术主刀资质的外科医师主刀,腹腔镜手术由已熟练掌握腔镜技术的外科医师主刀。本研究已通过浙江大学医学院附属儿童医院医学伦理委员会批准(编号:2022-IRB-067)。
表1 达芬奇手术组和腹腔镜手术组肠重复畸形患儿一般资料比较Table 1 Comparison of general profiles between Da Vinci and laparoscopic-assisted groups 分组例数性别(例)女男月龄[M(Q1,Q3),月]体重[M(Q1,Q3),kg]达芬奇手术组148616.5(11.15,56.5)11.3(9,16.1)腹腔镜手术组30141639(18.5,71.5)15(10.4,19.1)χ2/t/Z值-0.419-1.487 -1.336P值-0.517 0.137 0.181
二、手术方法
(一)达芬奇机器人肠重复畸形切除术
应用达芬奇Xi手术系统。患儿取平卧位,经脐部正中8 mm切口建立气腹并置入Da Vinci Trocar(图1A中b点)作为主视镜孔;以脐部与右下腹髂窝体表投影点连线(图1A中Ⅰ线)做垂直线(图1A中Ⅱ线),于Ⅱ线上距脐部约8 cm处右上腹及左下腹各取一点做8 mm切口(图1A中a和c点,该距离至少3 cm),置入Trocar作为操作孔,设置好“下腹部手术”模式后,空置4号机械臂,将2号机械臂与脐部Trocar(图1A.b点)连接,进主视镜确定术野后长按“targeting”按钮调整其他机械臂位置,将1、3号机械臂分别与a和c点Trocar连接,主视镜监视下安装操作器械,1号机械臂连接解剖器,3号机械臂连接持针器或电凝钩,自回盲部开始探查腹腔,发现病变肠管后将局部病变悬吊以便操作(图2中A),对于体积大、张力高的囊肿,予穿刺抽吸减压待张力减小后再行剥离(图2中B),腔镜下逐步剥离囊肿(图2中C),完整剥离囊肿后检查局部肠管是否完整(图2中D),4-0可吸收线缝合浆肌层(图2中E),在腔镜监视下取出囊肿,撤镜、排气并缝合切口。
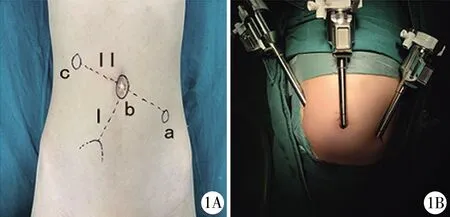
图1 达芬奇肠重复畸形Trocar布局图(患儿女,4岁10个月,回肠囊肿型肠重复畸形)1A:Ⅰ线为脐部与右下腹髂窝体表投影点连线,Ⅱ线与Ⅰ线垂直,a、b、c三个点为达芬奇Trocar的三个位置,位于Ⅱ线中点和两端上; 1B:完成达芬奇Trocar放置后效果图Fig.1 Trocar position of Da Vinci robot surgery for a 58-month old girl with ileal cystic intestinal duplication

图2 1例达芬奇机器人肠重复畸形切除术患儿术中照片(患儿女,4岁10个月,回肠囊肿型肠重复畸形)A:悬吊囊肿; B: 穿刺减压囊肿; C:剥离囊肿; D: 完整剥离囊肿后检查局部肠管是否完整; E:缝合局部浆膜层Fig.2 Operation of Da Vinci robot in the treatment of a 58-month-old girl with ileal cystic intestinal duplication
(二)腹腔镜辅助肠重复畸形切除术
腹腔镜辅助肠重复畸形切除术采用脐部两孔法,患儿取平卧位,经脐下缘5 mm切口建立气腹后,分别经脐上、下缘置入5 mm Trocar。腔镜下操作:自回盲部开始探查腹腔,找到病变肠管后以抓钳固定,扩大脐部切口,将病变肠管经脐拖出体外,切除局部肠管并行肠吻合术,若囊肿与正常肠管有明显间隙则行囊肿剥离并缝合局部浆膜层,将肠管回纳入腹腔后撤镜、排气并缝合切口。
三、观察指标
收集两组患儿性别、年龄、体重、手术时长、术后开始进食流质时间、术后住院时长、住院费用、术后并发症(包括术后出血、感染、肠瘘及肠梗阻等)等临床数据。
四、统计学处理

结 果
达芬奇手术组均在腹腔内完成囊肿剥离,无需行肠切除肠吻合。腹腔镜手术组有2例在将病变拖出体外后能清晰看到囊肿与正常肠管之间有间隙而行囊肿剥离,其余病例行局部肠管切除肠吻合术。两组手术时长差异无统计学意义(P>0.05),但两组术后进食时间、术后住院时长、住院费用差异有统计学意义(P<0.05)。达芬奇手术组术后均恢复良好,未见明显并发症;腹腔镜手术组有1例术后出现切口感染,经换药保守治疗后好转。所有患儿出院后随访3个月,均恢复良好,复查B超未见明显异常(表2)。

表2 达芬奇手术组和腹腔镜手术组肠重复畸形患儿术中及术后情况比较Table 2 Comparison of perioperative status between Da Vinci and laparoscopic-assisted groups分组手术时间(x±s,min)术后进食时间[M(Q1,Q3),d]术后住院天数[M(Q1,Q3),d]住院费用[M(Q1,Q3),万元]并发症(例)达芬奇手术组85.57±18.883(2,3.25)6(4.75,6.25)6.4(6.1,6.8)0腹腔镜手术组84.33±19.824(4,5)7.5(6,10)1.7(1.4,2.0)1χ2/t/Z值0.196-3.493-3.679-5.292-P值0.846<0.001<0.001<0.001-
讨 论
达芬奇机器人手术系统的出现加快了外科手术的微创化、精准化及智能化发展速度。与传统腹腔镜设备相比,达芬奇机器人手术系统具有可消除手颤抖、设定动作比例和动作指标化功能;该系统具有更高的分辨率,可提供放大10~15倍后的高清三维立体图像,为术者提供了更为清晰的视野;其3个仿真手腕器械具有7个自由活动度,可360°顺、逆时针自由旋转;可以过滤人手的自然抖动,进行更精确而平稳地操作;而对于主刀医生而言,无需清洁洗手,能以更轻松舒适的姿势进行手术操作,减少疲劳感;机器人手术系统在拓展了微创外科治疗手段的同时,可有效缩短腔镜手术的学习曲线,使得传统腔镜下高难度手术或复杂手术相对容易完成[7-8]。
肠重复畸形根据不同形态分为囊肿型和管状型,其中囊肿型约占80%,并可分为向外突出的肠外囊肿型和向肠腔突出的肠内囊肿型;管状型多位于肠系膜附着缘,与正常肠管平行,形成双腔管道[9]。肠重复畸形的囊肿往往与正常肠管共壁,普通腔镜下很难准确区分其界限,传统的腹腔镜手术绝大多数情况下是在腔镜下找到病变部位,通过扩大脐部切口,将病变肠管拖出体外后进一步操作。与传统开腹手术相比,腹腔镜辅助肠重复畸形切除术使得肠管暴露于体外的机会大大减少,术后肠粘连、肠梗阻的发生率明显降低,且术后美观程度也得到了较大提高,但仍避免不了一部分肠管暴露于空气中,且绝大部分病例需行肠切除肠吻合;在少部分患儿中,传统腹腔镜视野下也可区分囊肿壁和正常肠管壁,从而实现完全腔镜下剥离囊肿,但完全腹腔镜下操作手术时间较长,对术者技术要求更高[10]。与腔镜器械相比,达芬奇手术系统的放大成像系统可以帮助主刀医师很好地区分囊肿壁和正常肠管壁,且依靠机械臂的灵活性和精确性,可以轻松实现完全腔镜下剥离囊肿,且不会过多地延长手术时间,既避免了将肠管拖出体外,又避免了肠切除肠吻合,从而进一步降低肠粘连、肠梗阻及肠瘘的发生率,并有利于术后肠功能恢复,缩短住院时间。
在布孔上,由于目前的机器人手术平台是依据成人进行研发,制造商建议每个端口之间的距离为8 cm,而对于儿童手术,成人既定的布孔间距、进鞘深度等装机细节并不完全适合于儿童,尤其是低龄儿童。通过实践操作,我们认为两侧操作孔的位置距离脐部最少需3 cm,可以避免机械臂活动受限而影响操作[11]。对于体积大、张力高的囊肿,可先予穿刺抽吸囊液,这样可以减小局部张力,以便剥离囊肿;术中可通过悬吊局部肠管或囊肿壁,使病变更好地暴露,有利操作;若通过悬吊仍暴露困难,则可增加一个5 mm的辅助孔,在助手协助下完整操作。另外由于缺乏触觉反馈,术中应尽量减少夹持肠管的动作,或夹持肠壁边缘,以免损伤肠壁。
达芬奇系统也有不足之处,主要体现在住院总费用高、手术耗时长。达芬奇系统的高额手术费用是目前常规开展的最大问题。在传统腹腔镜手术已能很好完成且并发症发生率不高的前提下,达芬奇系统的广泛应该还需要经历很长一段时间。相信随着技术的进步,当器械国产化实现的时候,达芬奇系统的费用问题将迎刃而解;而装机耗时问题,目前我们使用的Da Vinci Xi平均装机时间15~20 min,比前一代Da Vinci Si系统已有了明显的缩短,相信随着技术的发展,装机耗时这个缺点也将得到很好的解决。
综上所述,达芬奇机器人辅助肠重复畸形切除术是一项安全可行的新技术,与传统腹腔镜手术相比,其解剖更清晰,操作更精细,患儿术后恢复更快。但现阶段达芬奇手术的费用高、装机费时以及缺乏儿童专用的机器人手术系统和器械等,仍是亟待解决的问题。同时由于儿童机器人手术起步晚,未来也需要更多的临床研究来提供可靠的临床依据。
利益冲突所有作者均声明不存在利益冲突
作者贡献声明文献检索为陈肯、温李平, 论文调查设计为高志刚、陈青江、金益,数据收集与分析为蔡多特、张书豪、胡迪,论文结果撰写为金益、章跃滨、罗文娟、黄宗伟,论文讨论分析为金益
