基于磁感应通信的AUV姿态估计实验设计
2022-08-06孙彦景张晓光任青妍
李 松, 余 涛, 孙彦景, 张晓光, 任青妍
(中国矿业大学信息与控制工程学院,江苏 徐州 221116)
0 引 言
自主式水下航行器(AUV)广泛用于水下资源勘探、环境监测等领域,在AUV 完成任务或者能源不足时,需要回到水下平台完成对接回收。对接过程中,精确、稳定、实时的姿态估计,对AUV 自主行进、设备协同工作具有重要意义[1-3]。
现有水下AUV姿态估计方法包括惯性导航系统和基于声学、光学的姿态估计。惯性传感器的惯性误差会随着时间的推移而不断累积[4-5]。在水下环境中,水流扰动导致的载体震动,热噪声和电磁干扰等因素均会导致惯性导航系统MEMS 器件的随机漂移,性能随着时间的推移而不断恶化,降低了姿态估计精度。文献[6]中基于声学定位策略,在水下平台部署多个水听器,通过测量来自AUV 声信号的时间差,利用贝叶斯反演算法,得到AUV 的3D 位置信息。文献[7]中利用水下光学引导技术,在水下平台放置引导光源阵列,AUV底部安装视觉检测传感器,完成对AUV 的姿态获取与调整。但是,在水下多径环境中,信道复杂,伴随着多普勒效应,光的折射、散射等影响,基于声学、光学技术的水下姿态估计方法导致较大的误差。
磁感应通信技术利用线圈间的耦合磁场传输信息,在水下/地下等复杂环境中拥有很大的优势[8-12]。磁场比电磁波能更有效地穿透水下介质,同时磁感应信号在介质中的传播速度约等于光速,时延低;水的磁导率与空气的磁导率几乎相同,磁场没有多径效应,因此水下的磁感应信道稳定,没有多径衰落问题。此外,磁感应通信技术的线圈实施成本低,有利于基于磁感应通信的水下传感节点的大规模生产和部署。
本文基于基于磁感应通信的原理,设计了水下AUV姿态估计实验。使用三向线圈作为接收线圈,根据接收线圈上耦合到的感应电压值,分析推导了线圈感应电压值与姿态角的数学模型,利用压缩感知解算出姿态角,通过仿真对姿态数学模型进行验证,同时分析了不同发送线圈个数对姿态估计误差的影响。
1 磁感应通信原理
磁感应通信模型如图1 所示,在发送端和接收端使用环形线圈作为天线,发送线圈和接收线圈的半径分别为at,ar,线圈之间的距离为r。
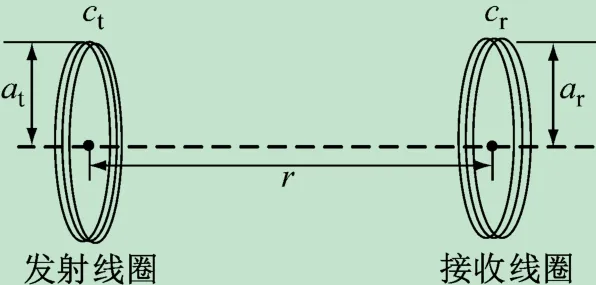
图1 无线磁感应通信模型示意图
在磁感应通信系统中,通过线圈之间的磁场耦合进行信号的传输。发送线圈中加载的信号为交变电流,即I=Imsin ωt,其中ω=2πf,f为发送信号的频率。这个电流在发送线圈周围产生时变的磁场,处于磁场中的接收线圈会产生感应电动势,由此通过感应电动势的变化,完成信号的调制解调。
磁感应通信的传输模型如图2(a)所示,M是发送线圈和接收线圈之间的互感;Um是接收端的感应电动势;Lt和Lr分别是发送线圈和接收线圈的自感;Rt和Rr分别是发送线圈和接收线圈的电阻,根据图2(b)电路模型,Zrt是接收线圈对发送线圈的反射阻抗;Ztr是发送线圈对接收线圈的反射阻抗,ZL是接收线圈的负载,则根据斯托克斯定理[13],线圈之间的互感为


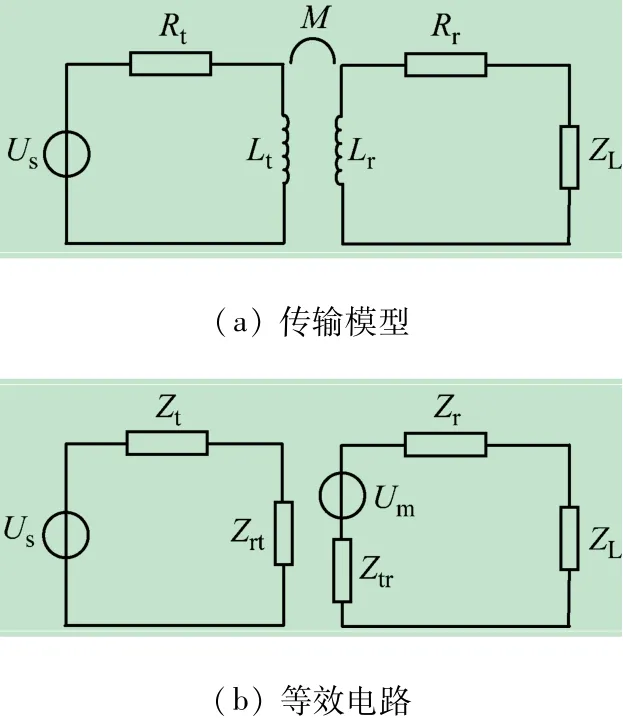
图2 磁感应通信电路模型
式中,J为线圈的方向因数。假设二维平面内,发送线圈和接收线圈法向量与轴线的夹角分别θt,θr,则方向因数J可表示为

根据式(5)~(7),可知接收线圈的感应电动势Um与线圈的方向角度有关,通过建立相应的电压与角度的关系模型可以估计出姿态角。
2 AUV姿态估计模型
本文讨论的AUV 姿态估计方法的工作场景如图3 所示,水下回收平台用于对AUV实施对接。在平台上部署k个单向磁感应发送线圈,在AUV中部署三向磁感应接收线圈。
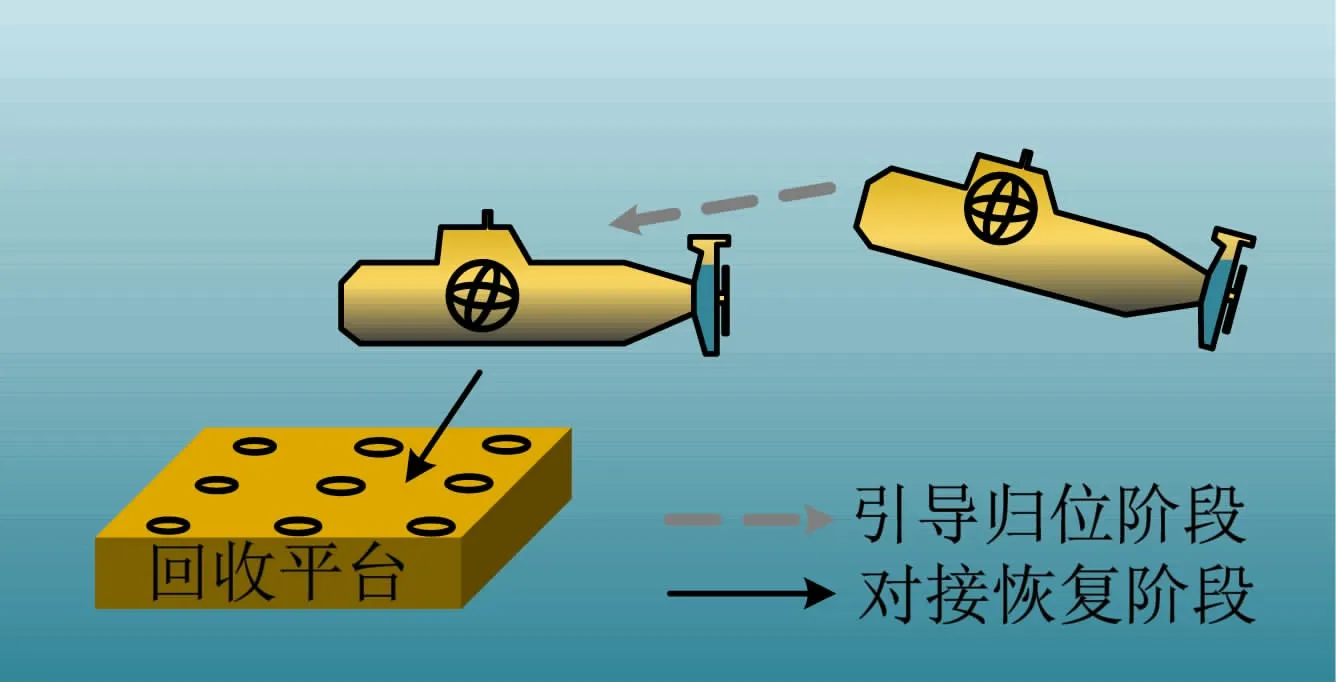
图3 AUV姿态估计场景图
为了表示姿态角信息,需要定义两个坐标系,平台坐标系和载体坐标系。平台坐标系为与平台台体固连的右手直角坐标系,本文以水下对接平台的中心为原点,两个坐标轴在台体平面内,另一个坐标轴垂直于该平面。
载体坐标系是与AUV固连的坐标系,原点选择在载体的质心上,本文即为AUV中三向磁感应线圈的位置,Ox轴为载体的纵向对称轴,指向载体前方为正;Oy轴在载体的横向对称轴,指向右方为正,与Ox轴正交;Oz轴通过质心位置,正指向以右手定则确定。如图4 所示,对于本文使用的三向磁感应线圈,其由3 个独立的磁感应线圈构成,线圈中心为原点,与xOy坐标轴平面重合的线圈记为S1,与xOz坐标轴平面重合的线圈记为S2,与yOz坐标轴平面重合的线圈记为S3,即3 个独立线圈两两正交,构成三向磁感应线圈。设AUV的航偏角为α,俯仰角为θ,横滚角为φ,通过与平台坐标系结合在一起,就可以表示AUV的姿态(α,θ,φ)。
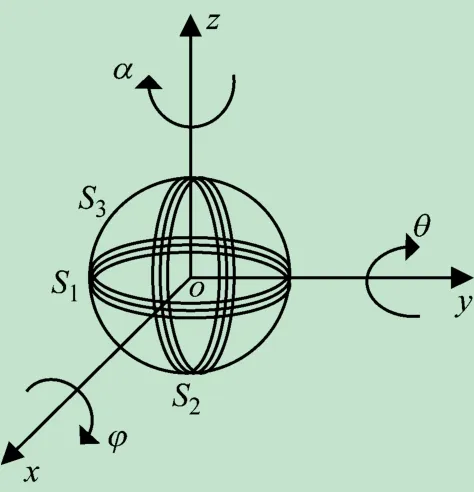
图4 载体坐标系

图5 AUV姿态估计模型
AUV姿态估计模型如图5 所示,发送线圈半径为at,匝数为Nt,以N×M的阵列等间距分布(k=N×M),接收线圈半径为ar,匝数Nr,与平台中心的距离为d。本文已知发送线圈、接收线圈相对于平台坐标系的坐标位置,依次对发送线圈给予激励电流。由于不是同时发送信号,所以发送线圈之间不会产生干扰。在接收端,三向接收线圈每次接收都会耦合出3个感应电动势,通过电压传感器获得线圈的感应电压,便可根据电压姿态角模型解算出AUV的姿态。
3 磁感应通信的姿态估计方法
3.1 电压角度模型
如图6 所示,单个发送线圈工作时,以发送线圈中心为原点,线圈与x′O′y′平面重合建立相对坐标系分析,已知三向线圈中心点P的相对坐标(x,y,z)。
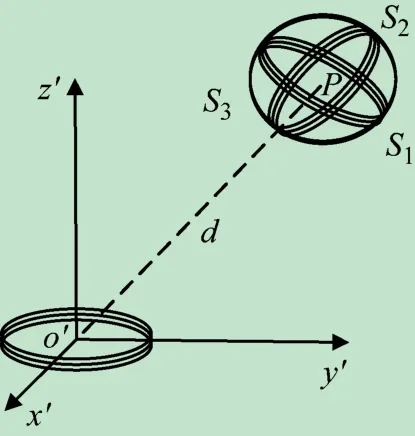
图6 电压角度模型
根据电磁场理论[14],当向发送线圈添加激励电流I=I0·e-2jπft时,在空间中已知坐标点P处产生的磁感应强度为

式中:ex,ey,ez分别为3 个坐标轴的单位向量;St是发送线圈的面积
发送线圈产生的磁场穿过以P点为中心的接收线圈的磁通量为

式中:n为接收线圈的法向量;Sr是接收线圈的面积,
由法拉第电磁感应定律可得,接收线圈的感应电动势为

在三向接收线圈中,需要分别表示出3 个线圈的法向量,法向量与姿态参数α,θ,φ有关。因为平台坐标系与载体坐标系之间的转换关系由载体的姿态参数α、θ、φ决定两者的转移矩阵,所以姿态转换矩阵可以由如下公式给出[15]:

根据式(11),定义接收线圈S1、S2、S3的法向量分别为n1、n2和n3。则对于S1接收线圈,根据式(10),其感应电动势为
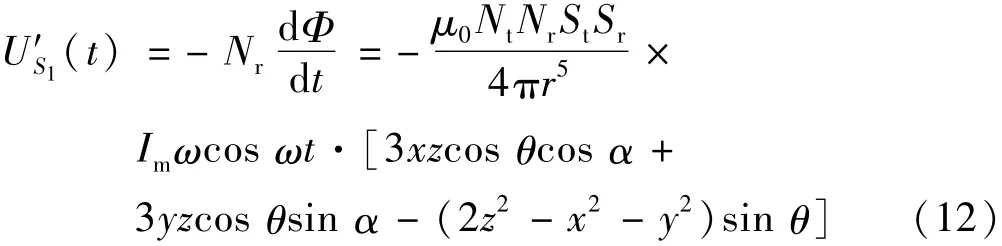
同理可得S2、S3接收线圈感应电动势U′S1、U′S2。
在姿态估计过程中,当第k个发送线圈激励时,三向接收线圈上的感应电动势记为矩阵形式Uk,即
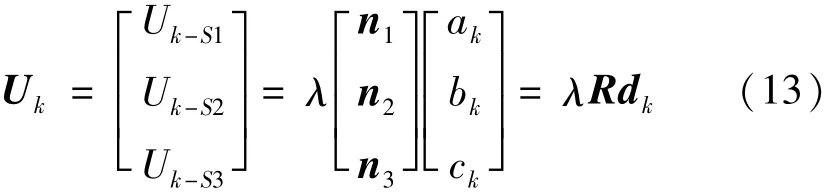

根据式(13),多次激励获得三向接收线圈上感应电动势的矩阵为

从式(14)可以看出,电压与姿态角相关,由此建立了电压与姿态角的数学模型。通过解算式(14)可以得到姿态角。
3.2 基于压缩感知的姿态角解算方法
本节提出基于压缩感知的姿态角解算方法,对式(14)进行解算。假设一个一维离散信号x=[x1,x2,…,xN]T,N个N维的基向量{ψi}N i=1构成一个维的稀疏表示矩阵ψ,如果信号x可以被表示为

其中δ是仅含有K个非零值的向量,则称信号x是稀疏的,然后用一个满足一定条件的测量矩阵对信号进行感知就可以得到x的观测信号

式中,y是M×1 维的观测向量。E. Candes 等证明了如果传感矩阵A 满足任意2K列都线性无关,则可以通过以下方程恢复θ:
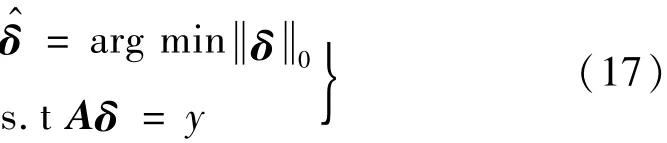
式(17)是一个NP-hard 的非凸优化问题,通过压缩感知数据恢复算法恢复出δ 后,可以根据式(15)进一步得到目标信号x。
根据式(16)的形式,将式(14)写为如下形式:
式中:x=[0,0,…,1,…,0]T,是一个稀疏向量;

矩阵Θ为一个过完备字典,Ψ是与α,β,γ有关的矩阵,α∈(-90°,90°),β∈(-90°,90°),γ∈(-90°,90°)。对空间中的角度进行等间隔采样,ξ1为空间角度采样间隔,即取:
通过查找电压值对应的姿态信息,利用正交匹配追踪算法解算出稀疏向量x 中非零元素的位置,得到其中非零项对应的(α0,β0,γ0)的值;再以ξ2度为间隔,则有
与上述过程同理,再恢复出x 即得到其中非零项对应的(α,β,γ)的精确估计值,即(α^,β^,γ^)。
基于压缩感知的姿态估计算法详细步骤表述如下:首先依据电压角度模型矩阵Utotal,写出过完备字典矩阵Θ;以ξ1间隔分解空间中的角度;利用OMP算法求解稀疏向量x;得到初步姿态角(α0,β0,γ0);间隔ξ2分解空间中的角度,重复利用OMP算法求解稀疏向量x;直至算法收敛得到精确的姿态角(α^,β^,γ^)。
4 仿真分析与实验
根据上述分析,利用MATLAB 软件对姿态估计方法进行仿真,利用计算机随机生成一组姿态角信息,噪声为高斯噪声,分析了信噪比与姿态估计精度的关系,研究不同发送线圈数量对姿态估计精度的影响。
在河道、湖泊淡水环境中,对接姿态调整阶段距离较近,取d=5 m,分别给定平台上的发送线圈个数k为6 和9,通过5 000 次蒙特卡洛仿真实验,得到在AUV距离平台中心5 m时,信噪比(SNR)为0 ~20 dB时的姿态角均方根误差(RMSE)分布曲线图,如图7所示。

图7 姿态角误差分布曲线图
由图7 可知,在信噪比为0 dB 时,有6 个发送线圈情况下,姿态角均方根误差精度约为1.8°,有9 个发送线圈情况下,姿态角均方根误差精度约为1.2°。在信噪比为10 dB时,有6 个发送线圈情况下,姿态角均方根误差精度约为0.6°,有9 个发送线圈情况下,姿态角均方根误差精度约为0.4°。在信噪比为20 dB时,两种不同数目发送线圈情况下,姿态角均方根误差精度均约为0.2°。即当距离一定时,姿态角的误差随着信噪比的增大呈减小趋势,在低信噪比条件下,可以通过增加发送线圈个数来减小误差,当信噪比较大时,不同发送线圈个数对姿态角误差影响变小。
为了进一步验证所提出的基于磁感应通信的AUV姿态估计方法的可行性,利用通用软件无线电外设(USRP)以及三向线圈搭建实验平台,如图8 所示。
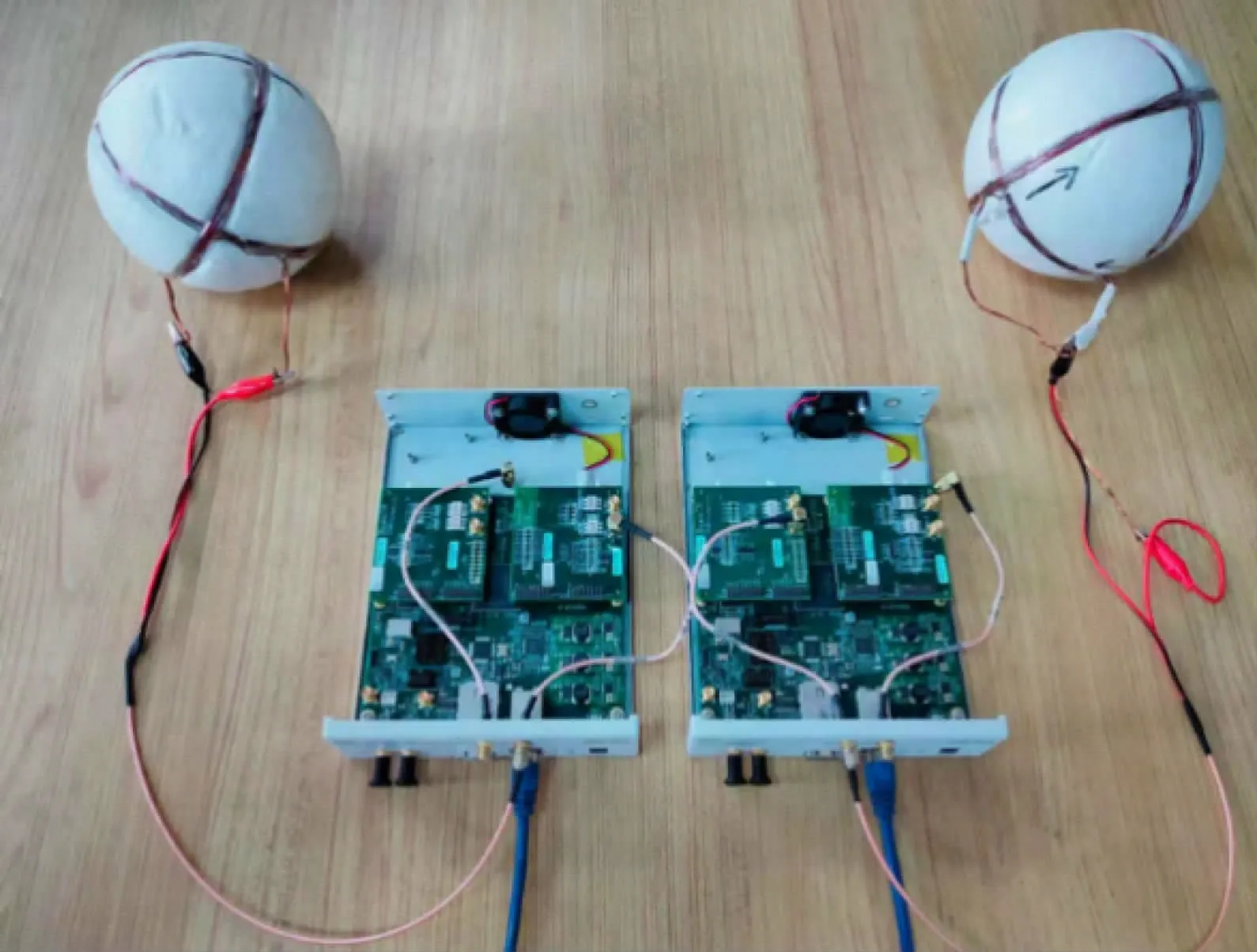
图8 硬件实验平台
本次实验所使用的三向球形线圈直径为15 cm,线圈匝数为50 匝,两个球形线圈之间的距离为50 cm。在实验中,固定接收线圈的姿态角为(45°,45°,45°),通过对接收线圈电压数据的计算,输出实验测量姿态角数值。通过10 次实验测试,所得数据如表1所示。
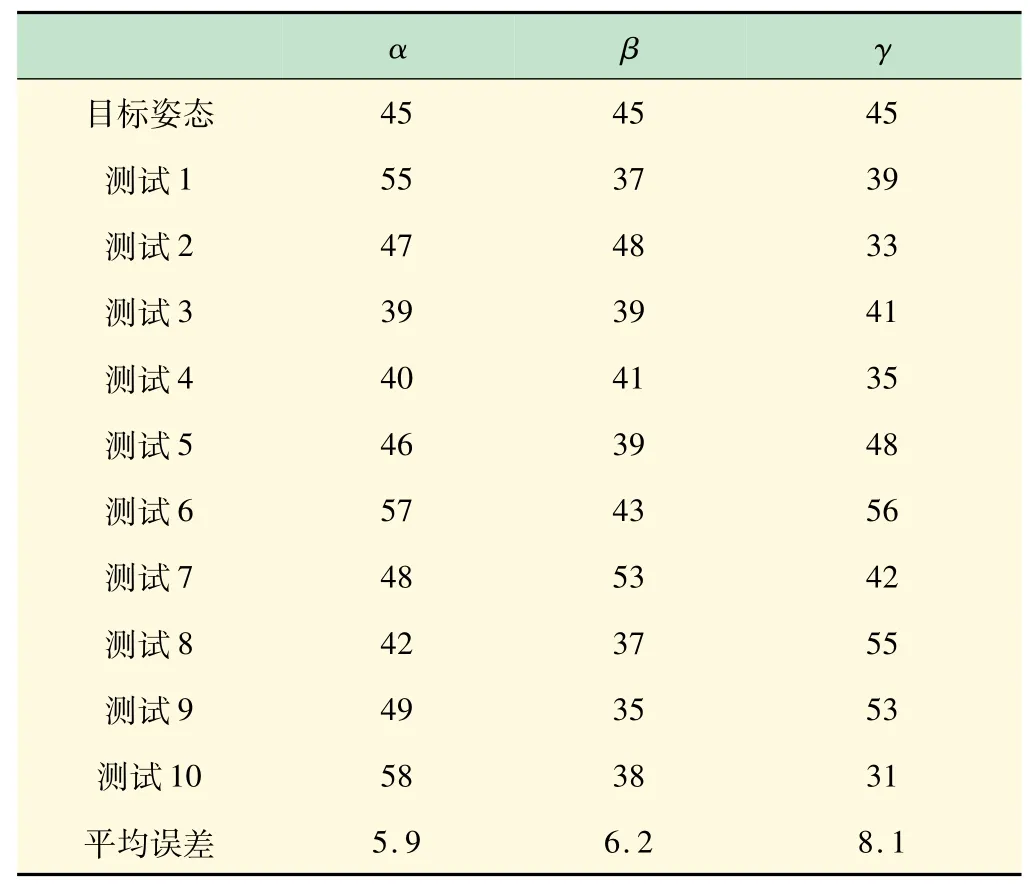
表1 实验测试数据 (°)
由表1 可以看到,对于单次的实验数据,姿态角(α,β,γ)存在几个方向的角度偏差过大的问题,最大误差达到14°。通过多次测量数据,取均值,姿态角的平均误差在5° ~8°之间,由此表明提出的目标姿态估计方法具有可行性,实验中可通过多次测量以提高姿态估计误差精度。
5 结 语
本文利用磁感应通信原理,研究了接收线圈感应电压与AUV姿态角的关系,推导了电压与姿态角数学模型,通过压缩感知恢复出姿态角。理论分析和仿真结果表明:①当发送端线圈数目一定时,随着信噪比增大,姿态角的均方根误差减小;②增加发送线圈数目,在低信噪比时可以增加姿态角估计精度,但是随着信噪比的增加,大约在10 dB以上时,增加线圈数目不能带来很大的估计精度提升。通过三向球形线圈完成了目标姿态估计的实验测试,测试结果表明,提出的目标姿态估计方法具有可行性,实验中多次测量可提高姿态估计误差精度。
