基于AUKF的锂离子电池SOC估计方法*
2022-08-04弓清瑞张吉昂
王 萍,弓清瑞,程 泽,张吉昂
(天津大学电气自动化与信息工程学院,天津 300072)
前言
锂电池作为一种清洁能源,以其能量密度高、体积小、寿命长等优点,被广泛应用于电动汽车和电力系 统 等 诸 多 领 域。 电 池 管 理 系 统(battery management system,BMS)可以实现对电池的科学评估和风险预警,从而保证电池的稳定运行。电池荷电状态(state of charge,SOC)直接反映了电池的剩余电量,它的准确估计是BMS 运维的关键环节。然而SOC 并不能直接测量,只能通过电池的外部可测变量,结合数学算法来推断。
目前SOC 的估计方法主要有直接测量法、数据驱动法和基于自适应滤波器的方法。
直接测量法包括安时积分法和开路电压法。安时积分法是通过对放电过程中电流随时间积分来获得SOC。该方法有简单易用的优点,但十分依赖于SOC 初值的确定,且电流的测量误差会随时间累积。开路电压法是通过测量电池的开路电压(open circuit voltage,OCV),通过查询OCV-SOC 曲线来获得电池SOC。但该方法须将电池离线后进行长时间静置,因而难以用于SOC的在线估计。
数据驱动法是使用机器学习的算法建立电池外部可测变量如电压、电流和温度等参数与SOC 的映射关系。机器学习方法主要包括统计机器学习方法和神经网络的方法。其中,后者有更灵活的内部结构,对非线性关系的表达能力也更强,应用也更广泛。这类方法无须分析电池复杂的电化学反应,但计算量较大,且十分依赖于训练集的有效可靠。
基于自适应滤波的方法须建立等效电路模型,再结合滤波算法来实现SOC 的闭环估计。如文献[11]中使用2 阶RC 模型对锂电池进行建模,并结合模糊自适应卡尔曼滤波器来实现对SOC 的实时估计。常用的等效电路模型有PNGV 模型和RC 模型等。常用的滤波算法有观测器、粒子滤波器、卡尔曼滤波器等,其中卡尔曼滤波器最为常用,有着许多优秀的变型,如扩展卡尔曼滤波器、自适应扩展卡尔曼滤波器和无迹卡尔曼滤波器等。这类方法可以矫正SOC初始值不确定造成的误差和缓解过程中误差积累,但对等效电路的参数较为敏感。
无迹卡尔曼滤波器(unscented Kalman filter,UKF)因其优越的性能被广泛应用。但UKF 存在对电池模型精度和系统噪声的要求较高,稳定性不强的问题。针对该问题,本文中引入一般性的滤波器收敛判据,从自适应调整测量噪声、调整过程噪声和修正卡尔曼增益的角度改进UKF,形成了基于自适应无迹卡尔曼滤波器(adaptive unscented Kalman filter,AUKF)的SOC 估计方法。本文利用测试数据和马里兰大学电池数据集进行了实验,结果表明所提方法具有较快的收敛速度和较高的估计精度。
1 RC等效电路模型
RC 等效电路模型结构简单,只需少量的参数和较低的计算成本便可完成建模,应用广泛。本文以2阶RC 模型为例,展示电池建模和SOC 估计的过程,模型结构如图1所示,其状态空间数学表达式为

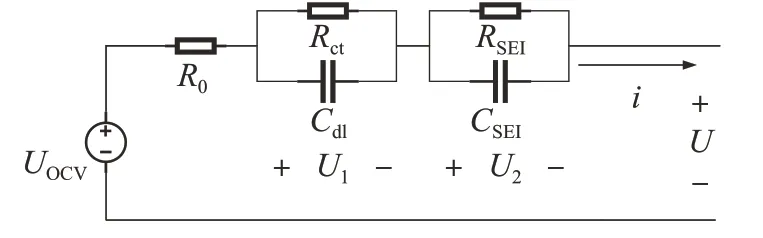
图1 2阶RC模型的结构
式中:表示电池端电流;代表电池端电压;表示电池的欧姆内阻;和并联环节表示电化学极化过程,和并联环节表示浓度差极化过程;表示电池的开路电压。
本文通过离线实验对RC 模型阻容等参数进行辨识,具体包括(·)、、、、和。
2 参数辨识
2.1 CCP测试
本文的实验对象是额定容量为3 A·h、标称电压为3.6 V 的18650 三元锂离子电池。设定恒温箱温度为25 ℃,采用恒流脉冲(constant current pulse,CCP)测试进行参数辨识,实验步骤如下:
①将室温下充满电的电池置于恒温箱内,静置1 h,记录电池的开路电压;
②以1C恒流放电3 min;
③静置2 h,记录电池的静置电压;
④重复过程②和③直至电池放空。
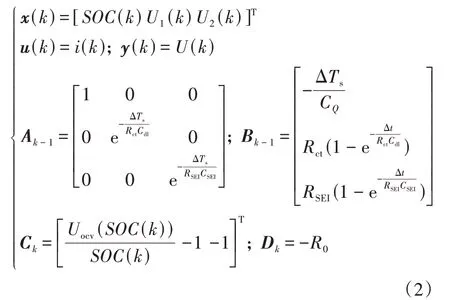
CCP 实验的电压和电流全周期和一个周期的变化曲线如图2和图3所示。
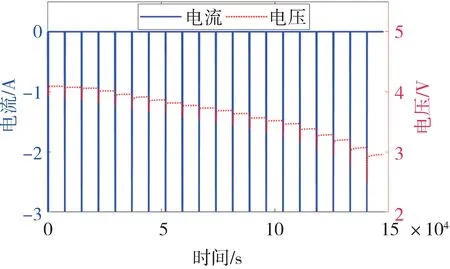
图2 CCP测试全周期曲线图
图3 中A 点之前电池处于静置状态;在BC 段,以1C 放电3 min,电压快速下降,SOC 下降0.05;在DE 段,电池静置2 h,电流为0,电压缓慢回升,并逐渐趋于稳定。
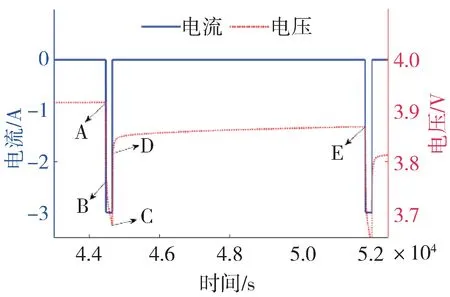
图3 CCP测试一个周期曲线图
2.2 OCV-SOC曲线拟合
在CCP 测试第③步中,取静置结束时刻的E 点电压值作为当前SOC 下的OCV 值。CCP 测试过程共得到20 个SOC-OCV 散点。本文将电化学模型Shepherd、Unnewehr 和Nerst 进行组合,得到一种较为理想的开路电压模型,如式(3)所示,使用最小二乘法来对其进行拟合,从而得到各参数的辨识值。

2.3 阻容参数辨识
2.3.1的辨识
分别计算通电瞬间(AB 段)和断电瞬间(CD 段)的后,取二者的平均值作为最终值,计算式为

式中Δ和Δ分别为通电和断电瞬间电压变化的绝对值,分别对应图3 中AB 段的电压骤降和CD段的电压骤升。
2.3.2、、和的辨识
DE 段可看作是RC 环节的零输入响应。D 为起点,电容和两端初始电压分别为(0)和(0),这时端电压表达式如式(5)所示。使用最小二乘法对式(5)进行拟合,可以得到(0)、(0)以及时间常数、的值。

BC 段可看作RC 环节的零状态响应。因为电容电压不能突变,由C 点和D 点的极化电压相等的关系可得

式中=3 min。
由式(6)和式(7)可计算得到和,进一步由=×的关系可得和。
RC 模型的阻容参数会随SOC 的变化产生波动,使用线性插值法来拟合这种波动,即

式中:={0.95,0.9,...,0};X为对应的参数取值序列;为某个实际的SOC 值。Interp2 表示2 维线性插值运算,即在与距离最近的两个参考点之间建立线性模型,将代入获取此时的参数值。
3 AUKF算法
3.1 UKF算法
UKF 算法主要包括系统初始化、状态预测和测量校正3个部分。
(1)系统初始化
初始化状态量和误差协方差矩阵为

用对称采样法生成初始Sigma点,其中为尺度参数:

(2)状态预测
第个采样时刻,Sigma点构建的矩阵为
对式(11)的Sigma点进行状态方程的处理,并对时刻系统状态量和误差方差矩阵进行预测:
式中Q为时刻的过程噪声协方差矩阵。
(3)观测校正
计算时刻的观测量的估测值:
计算时刻观测量的方差矩阵为

式中R为时刻的测量噪声协方差矩阵。
计算时刻状态量与观测量的协方差为

计算卡尔曼滤波增益为

更新状态量与误差方差矩阵为

3.2 AUKF算法的实现
UKF算法能够实现对系统状态的实时估计。但仍存在以下问题:
(1)由于在非线性系统中存在一些不确定因素,导致过程噪声协方差矩阵Q和测量噪声协方差矩阵R难以获得准确值。而使用经验法将它们设置为定值则会影响UKF的估计精度。
(2)UKF对RC模型的精度十分依赖,但RC模型的阻容参数辨识存在误差是不可避免的。当模型误差较大和R取值不当时,会通过测量校正环节引入较大的状态估计误差。
(3)实际应用中常存在SOC 初值存在偏差和测量噪声异常扰动等突发情形。常规的UKF 对这些情形的自适应能力较有限。
3.2.1 测量噪声协方差自适应调整
设置越大,表明对测量值的置信度越低,这会导致算法初始的收敛速度慢;设置越小,收敛速度越快,但会导致SOC 估计后期的波动性较大。可见过大或过小的值都会影响SOC 的整体估计效果。因此在滤波算法的初始阶段设置较小的值,用表示,使SOC的估计初值快速向真实值方向收敛,等到估计值收敛到真实值附近时,再切换较大的值,用表示,以降低估计值的非线性波动。和的取值与电压传感器的测量精度有关,所以在SOC 估计的初始阶段,的取值比电压传感器精确度低一个数量级,过小容易引起估计值波形在起始阶段过冲。则取比传感器精度高一个数量级的数,过大则会引起值减小,使测量校正失去作用。
根据文献[21]中提出的滤波器收敛性判据,滤波器发散时,真实的估计误差要远大于计算得到的预测误差。因此,SOC估计的发散条件为



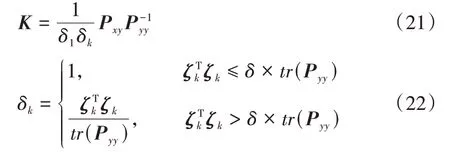
在后续SOC 的估计过程中,能通过影响增益,进而影响SOC 估计的测量校正阶段。当传感器测量误差较大或RC 模型的误差较大,即时刻的观测残差ζ较大时,如果此时值非0,会在测量校正阶段引入较大的估计误差。因此为该算法设置第2个判据:

若式(20)不满足,即观测残差ζ超过预设阈值时,则将设为无穷大,此时趋于0,相当于只进行状态预测而不进行观测校正,只有当测量误差较低和RC模型精度较高时,才同时进行状态预测和观测校正。判据式(20)的引入,有助于降低UKF对RC模型精度和传感器测量精度的依赖,增强SOC 估计的稳定性。
3.2.2 卡尔曼增益自适应调整
3.2.3 过程噪声自适应调整
过程噪声主要反映系统模型的误差。通过在SOC估计的过程中动态调整,使其能充分反映系统模型本身的误差,以避免模型误差造成的SOC 估计精度过多的下降。方法是通过利用多个之前时刻的真实值与估计值的残差,对下一时刻的Q进行递推:

式中:-<<;e表示在-1~区间内,由电压测量值与模型估计值的残差组成的序列;G表示由e组成的协方差阵;表示该e序列的长度,该值越大,越能充分反映系统的模型误差,但是计算量也越大。Q由式(24)不断迭代递推获得。

通过在SOC 估计过程中对测量噪声协方差、卡尔曼增益和过程噪声协方差进行自适应调整,形成了AUKF算法,如图4所示。
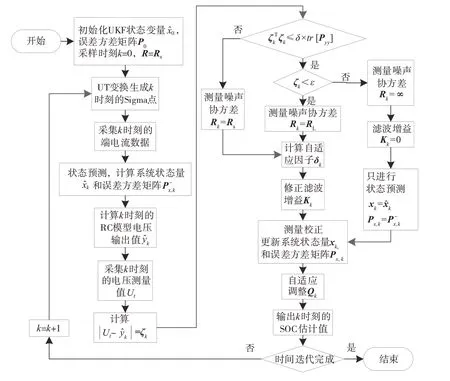
图4 AUKF算法流程图
4 实验与分析
利用实际测试数据和马里兰大学电池数据集,对所提出的AUKF算法的性能进行验证。
4.1 实验测试数据
设置恒温箱温度为25 ℃,对额定容量为3 A·h、标称电压为3.6 V 的18650 三元锂离子电池充满电后,采用动态应力测试(dynamic stress test,DST)工况进行放电,放电过程中电池的电压电流曲线见图5。
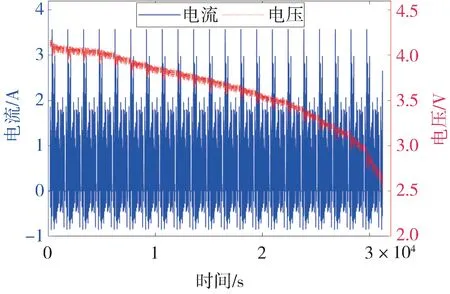
图5 DST工况下电压电流测试曲线
图6展示了采用AUKF 和UKF 算法进行SOC 估计的结果和相对误差,图7 为采用AUKF 算法进行SOC 估计过程中的电压观测值和模型输出值、拟合误差即残差随放电时间的变化情况。由图6 可知,UKF 算法收敛后的相对误差在3%以内,而AUKF 算法收敛后的相对误差则更小,接近于零,且具有更快的收敛速度,更高的估计精度,估计值曲线更加平滑和稳定。图6 和图7 右图的绿色虚线表示发散与收敛的界限:在它之前的时刻,由于SOC初始误差的存在,端电压的拟合残差也存在较大偏差,这时式(19)成立,滤波器处于发散状态,此时选取较小的作为测量噪声协方差,之后的时刻AUKF 收敛,选取较大的作为测量噪声协方差。图7右图的红色和蓝色虚线分别表示电压正阈值和负阈值,阈值设为0.03 V。在滤波器收敛后的SOC 估计过程中,由于传感器测量精度或RC 模型本身的误差造成一些时刻的观测残差大于阈值,则这些时刻的设为无穷大,只进行状态预测而不进行状态校正。
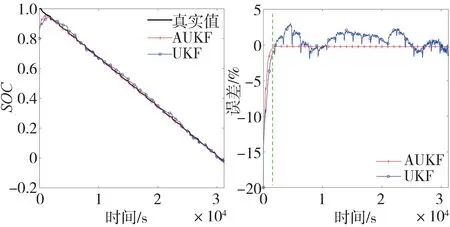
图6 SOC估计结果与误差(SOC0=0.8)
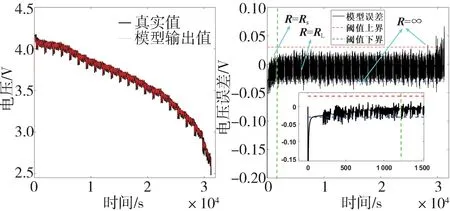
图7 电压观测值、模型输出值和残差的时间历程(SOC0=0.8)
为定量刻画算法的收敛性能,定义“跟随系数”为SOC 真实值与估计值的误差绝对值小于0.02 所用的时间与放电总时间的比值。表1 列出跟随时刻之后的平均绝对误差(mean absolute error,MAE)和均方根误差(root mean squared error,RMSE)及跟随系数。
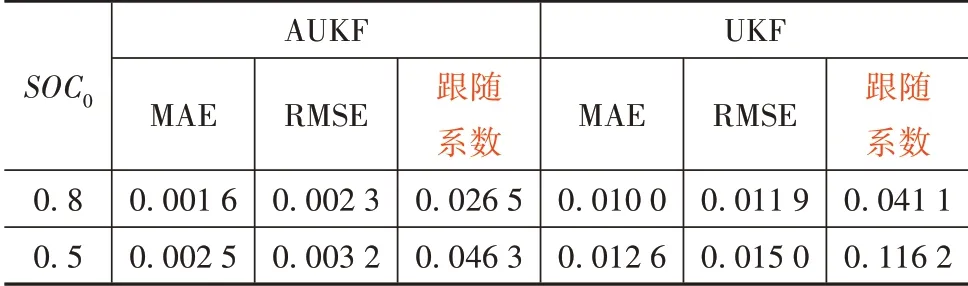
表1 SOC估计误差和跟随系数
为进一步验证不同的SOC估计初值对两种算法的影响,取=0.5,得到图8 和图9。由仿真测试结果可知,取较小的SOC估计初值时,两种算法下的收敛时间均会变长,跟随系数都有所增加,图8 和图9 的绿色虚线也更加靠右。其中UKF 的跟随系数增加幅度更大,表明UKF 算法抵抗初值不确定性的稳定性较差。虽然AUKF 算法的估计误差与初值为0.8 时相比略有增加,但估计误差MAE 与RMSE 仍保持在较低水平。
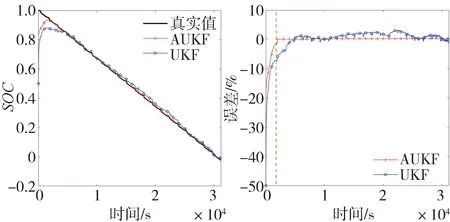
图8 SOC估计结果与误差(SOC0=0.5)
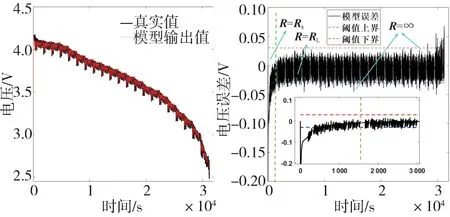
图9 电压观测值、模型输出值和残差的时间历程(SOC0=0.5)
为进一步验证所提出的AUKF 算法对不同SOC初值的收敛能力,取为0.2、0.4、0.6 和0.8 进行仿真测试,得到结果如图10 所示。估计误差和跟随系数列于表2 中。可知不同SOC 估计初值下,AUKF 均能可靠收敛,跟随系数都保持在0.07以内。随着初始误差增大,跟随系数升高,总体MAE 和RMSE 误差增大,但最大值都不超过1%。这表明所提出的AUKF 算法具有较高的估计精度和较好的鲁棒性。
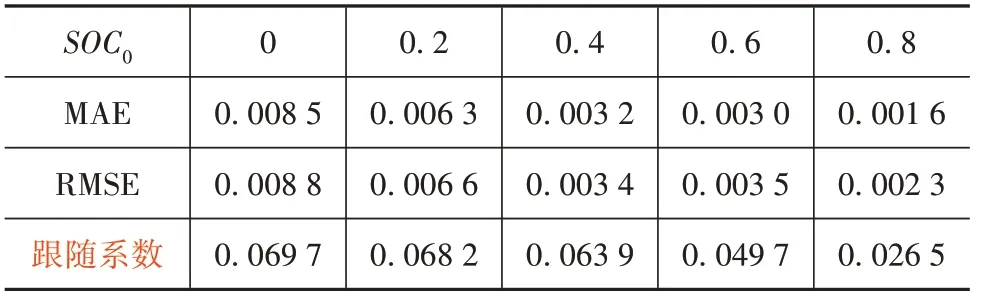
表2 不同SOC估计初值下的计算误差和跟随系数
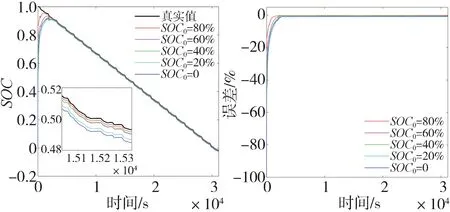
图10 不同SOC估计初值下的估计效果与误差
4.2 马里兰电池数据集
马里兰大学电池数据集使用额定容量为2 A·h、标称电压为3.6 V 的18650 三元锂离子电池进行试验。该数据集中提供了电动汽车常用的测试工况数据,如US06 工况、联邦城市行车(federal urban driving schedule,FUDS)工况、北京动态应力测试(Beijing dynamic stress test,BJDST)工况。因此,该数据集很适合验证本文提出的基于AUKF 的SOC 估计方法。需要注意的是,该数据集中的测试电池是从约80%额定容量时开始放电,在约为20%额定容量时放电结束,该放电区间也是电动汽车实际应用中最常用的放电区间。取=0.6,各动态工况的SOC 估计结果和误差分别如图11~图13 所示,其MAE 和RMSE 计算误差与跟随系数列于表3 中。可以看到,在3种不同测试工况下,与UKF相比,AUKF具有更小的跟随系数和估计误差,表现出更加优越的性能。
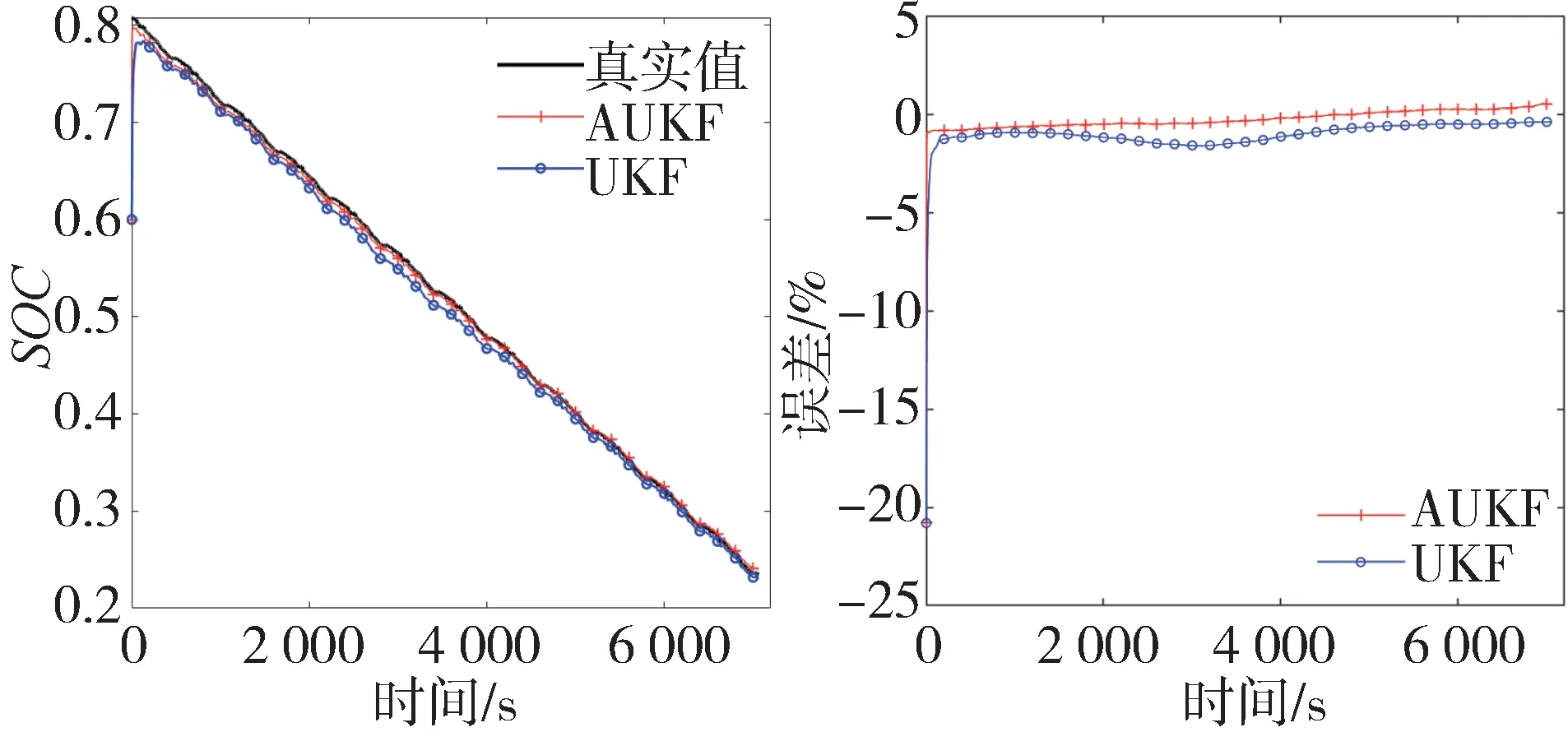
图11 SOC估计结果和误差(US06工况)
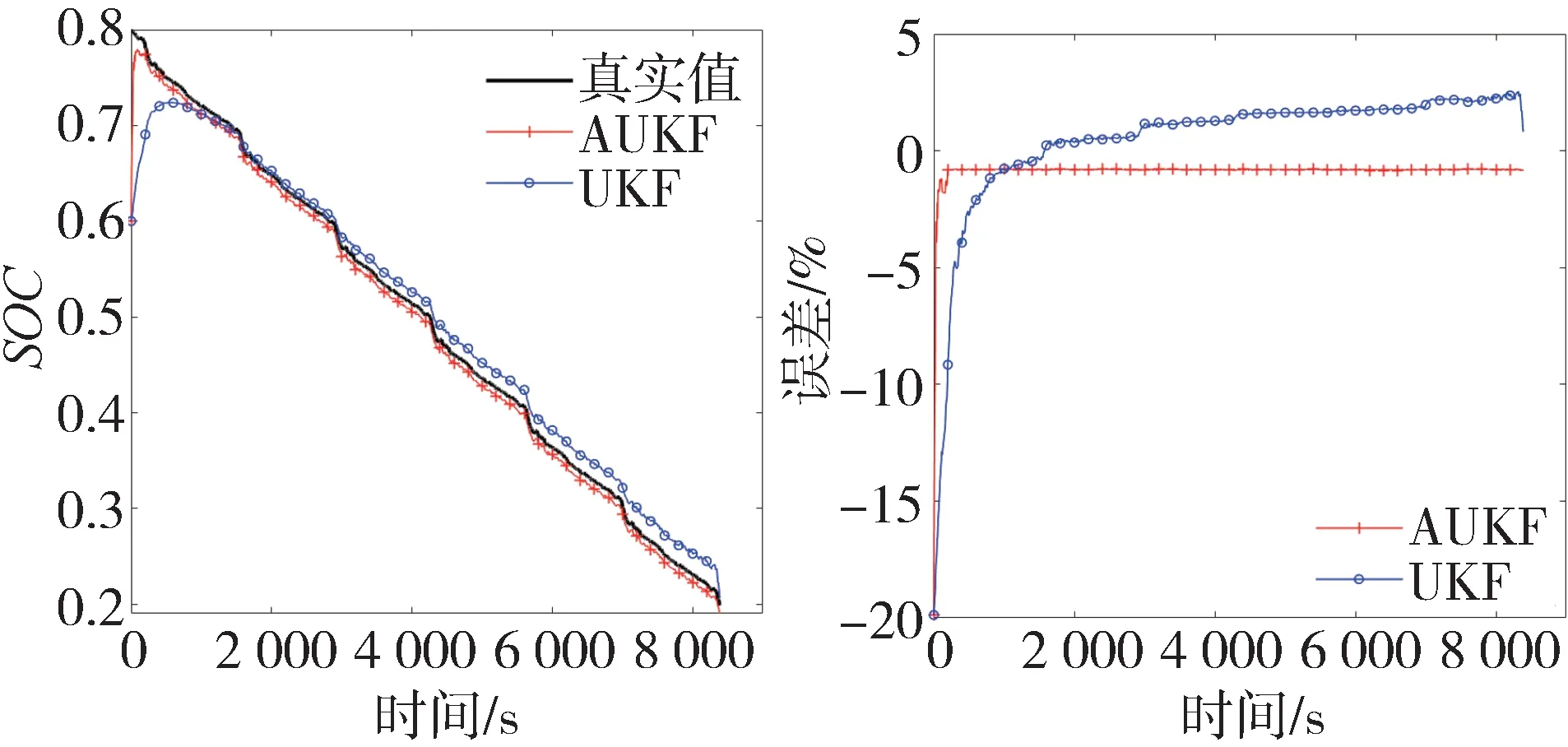
图12 SOC估计结果和误差(FUDS工况)
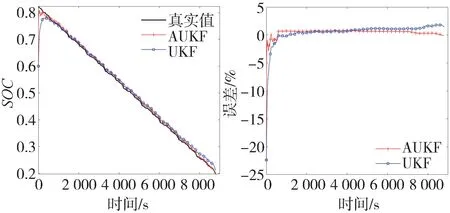
图13 SOC估计结果和误差(BJDST工况)
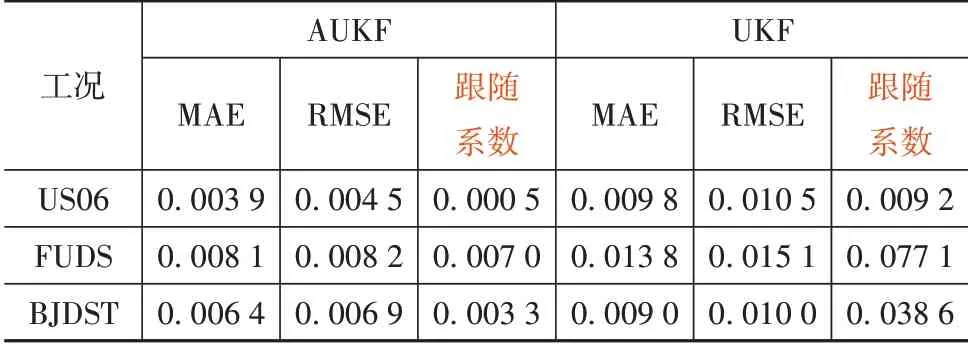
表3 马里兰数据集上的SOC估计误差与跟随系数
5 结论
首先介绍RC等效电路模型及其数学描述,完成了参数辨识和模型建立工作,并提出了一种阻容参数的二维插值方法,对阻容参数随SOC 的变化进行建模。其次针对常规UKF 存在的问题,提出了一种AUKF 算法,该方法将滤波器的一般性收敛判据引入UKF 中,并通过对测量噪声协方差、过程噪声协方差和卡尔曼增益进行自适应调整,提升了滤波算法的稳定性和收敛性,降低了对电路模型精度的依赖。最后在实际测试数据的DST 工况、马里兰大学电池数据集的3 种循环工况中进行实验验证。结果表明在不同的测试工况下,与常规UKF 算法相比,所提出的AUKF 算法皆具有较高的估计精度、较小的跟随系数和较平稳的估计曲线。
