多角度点云拼接算法实验分析
2022-08-03北京信息科技大学仪器科学与光电工程学院王新张晓青郭阳宽
北京信息科技大学仪器科学与光电工程学院 王新 张晓青 郭阳宽
在物体的三维形貌测量中,点云拼接对三维重建具有至关重要的意义。本文提出一种多角度被测物图像点云拼接算法,在相机投影仪旋转不同角度的情况下,拍摄被测物体多角度的图像信息,设置被测物体外围的圆孔辅助进行点云拼接,并采用ICP算法提高拼接效果。实验结果表明,本方法拼接效果好且拼接速度有明显提升。
随着国内外测量技术的不断发展与生活需求的快速增长,通过点云数据进行客观世界三维物体数字化建模的技术逐渐应用到各行各业中,并获得了良好的反响。当使用三维扫描设备扫描物体时,由于物体遮挡、视野范围受限等因素,在固定视角下很难通过一次扫描便获取物体表面完整的三维信息,因此在三维重建的实现中需要进行点云拼接。点云拼接一般分为点云粗拼接[1-4]和点云精拼接[5]。粗拼接适用于多角度点云角度相差较大的情况,依据多角度点云之间的对应点缩小点云之间角度和距离的差别,使其粗略合并在一起,点云粗拼接的精度一般不高,但能很好的提高点云整体拼接的速度。点云精拼接是指按照特定的准则作为输入,通过算法迭代[6]不断缩小点云拼接误差值从而实现多角度点云的精确拼接。在进行多角度点云拼接时,一般先进行点云粗拼接,将粗拼接的结果作为精拼接的初始值。
在工程应用中常常需要测量机械零件的三维形貌,机械零件大多表面光滑,缺乏纹理特征,重复的结构较多,且对精度要求很高,测量过程不能造成零件脏污或缺损,不适用于在零件上粘贴标志点后提取特征描述子进行拼接的方法。本文将基于光栅数字投影的结构光三维测量技术应用到机械零件的三维无损检测,采用旋转平台带动相机—投影仪进行旋转,得到机械零件多个角度的点云,利用测量区域外的圆孔实现机械零件点云的拼接。
1 机械零件点云粗拼接
为了实现单目光栅投影系统自动形成完整的点云且不用在零件上贴标志点,本文采取在检测区域外围制造圆孔,通过底部光源实现圆孔角度的识别,进而实现多角度点云的粗拼接。识别圆孔提取圆心的处理速度相对于从三维点云上提取变换矩阵的方法更快。
机械零件点云粗拼接步骤如图1所示。

图1 点云粗拼接步骤图Fig.1 Point cloud coarse stitching step diagram
在检测区域外围设置19个圆孔,其中2个圆孔的间隔是其他圆孔间隔的二倍,从而实现圆孔检测时起始方向的判定。设置旋转平台的旋转角度为5个,工业相机采集完光栅投影的图像后,会对圆孔进行图像采集,采集第一角度的圆孔图像后对圆孔图像进行灰度直方图计算,其中灰度值主要集中在0~50,不容易区分圆孔边界。为此对该图像进行灰度图拉伸,拉伸后灰度值范围在0~255,增大了圆孔边缘灰度变化,如图2所示,有利于提高后续圆孔识别精度。

图2 圆孔图像灰度拉伸结果Fig.2 Gray stretching results of circular hole image
对图像进行高斯滤波,去除环境光以及其他干扰,减少误差累计传递,滤波结果如图3所示。对图像进行二值化并进行连通域统计,去除过大或者过小的区域,结果如图4所示。

图3 高斯滤波结果Fig.3 Gaussian filtering result
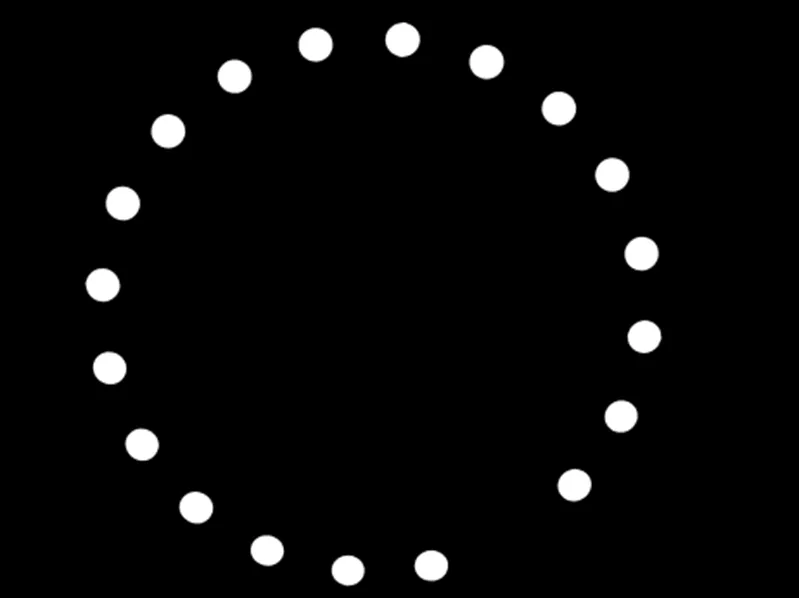
图4 二值化结果Fig.4 Binarization results
对图像进行霍夫圆检测,通过限定圆的大小,提取圆孔所在角度,圆心保存为二维坐标点集P2[i](i=1...19)。检测圆孔外轮廓的结果如图5所示。将检测的圆心通过相机-投影仪标定参数转换成三维坐标,储存到三维坐标点集P3[i](i=1...19),用于之后平移量的确定。将各圆孔的圆心P2[i]进行圆形拟合,确定所有圆孔形成大圆的中心O,结果如图6所示。

图5 圆孔轮廓提取结果Fig.5 Round hole contour extraction results

图6 大圆圆心提取结果Fig.6 Extraction of large circle center results
将圆孔圆心P2[i]分别与大圆圆心O进行斜率计算,确定每个圆孔圆心的角度。在计算过程中,由于圆孔圆心可能出现相对于大圆圆心的四个象限中,所以应分4种情况进行计算。计算得到的各圆孔角度进行排序,找取其中相差36°的两个圆孔圆心,以顺时针方向的圆孔圆心为始,对P2[i ]和P3[i]进行排列。同理可得其他角度的P2[i ]和P3[i ]点集,第一角度与其他角度求得的P2[i]点集中第一点的角度差为旋转角度。以第一角度为基准,对第二角度的三维点集P3[i]进行旋转得到结果如图7所示,可以看出两组P3[i]方向已经一致。将第一角度和其他角度的三维点P3[i]坐标之间进行求差值取平均计算,得到其他角度点云相对第一角度点云在x、y、z三个轴上的平移量。以第一角度为基准,对第二角度的三维点集进行平移得到结果如图8所示,可以看出两组P3[i]基本重合。
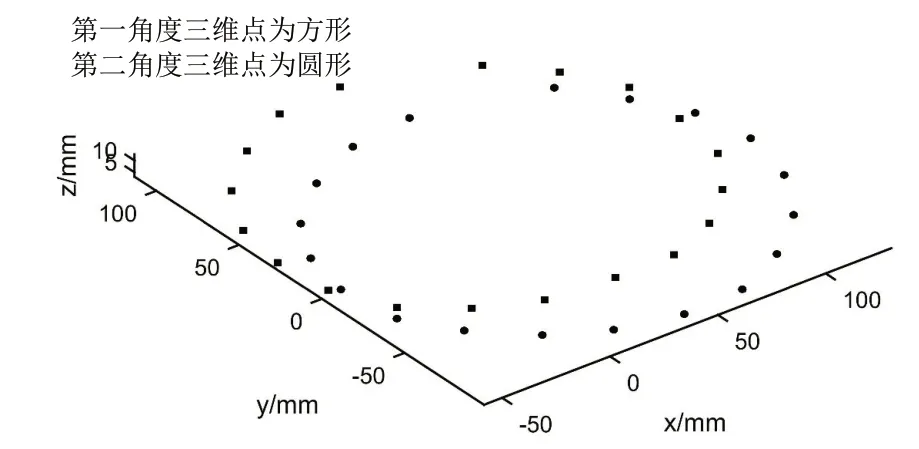
图7 第二角度三维点集旋转结果Fig.7 Second angle 3D point set rotation results
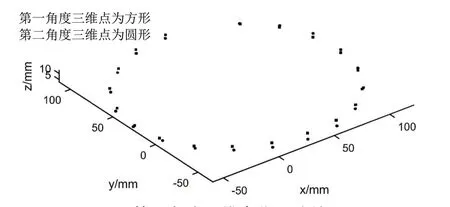
图8 第二角度三维点集平移结果Fig.8 Second angle 3D point set translation results
对第二角度的点云进行旋转平移,结果如图10所示,与第一角度点云如图9所示,圆孔位置基本一致,点云之间进行互补。
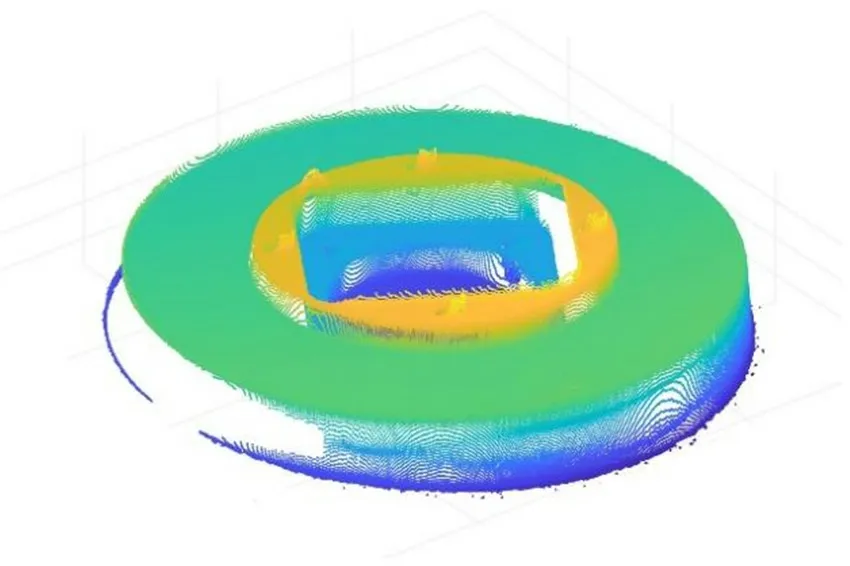
图9 第一角度点云Fig.9 First angle 3D points
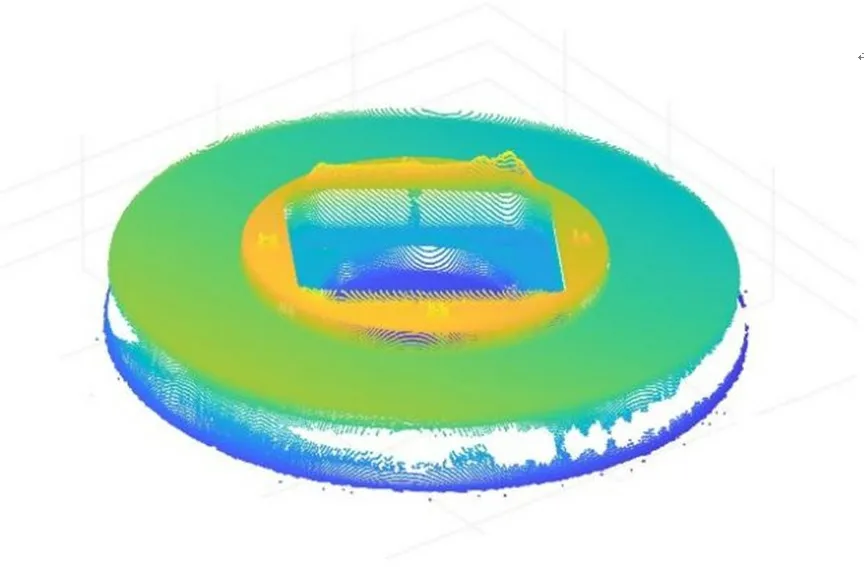
图10 变换后第二角度点云Fig.10 Second angle point cloud after transformation
2 机械零件点云精拼接
零件点云的粗拼接使多角度的零件点云在经过旋转平移之后,与第一角度的点云基本重合,但多角度点云之间还存在偏差。为了使多角度点云拼接更加精准,还需要用ICP算法进行迭代拼接。
ICP算法流程图如图11所示。
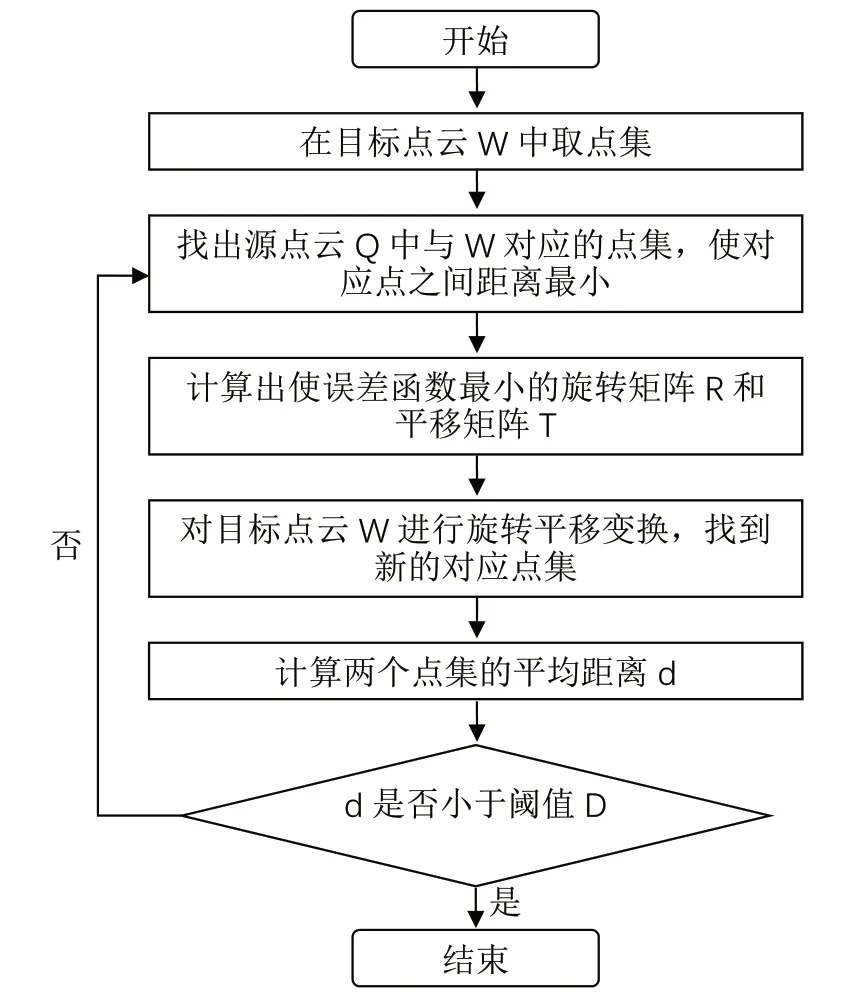
图11 ICP算法流程图Fig.11 ICP algorithm flow chart
3 点云拼接结果验证
将第一角度和其他四个角度进行拼接之后的零件点云如图12所示,零件完整点云部分地方冗余,主平面与侧面的点云不均匀,需要对零件完整点云进行精简,零件点云进行精简之后的结果如图13所示。

图12 完整点云Fig.12 Complete point cloud

图13 完整点云精简结果Fig.13 Complete point cloud simplification results
4 结论
通过相机—投影仪在旋转平台上旋转,采集多角度图像,在检测区域外围设定圆孔,使用识别圆孔提取圆心的方法进行点云的粗拼接,再使用ICP算法进行点云精拼接,并通过实验验证了方案和算法的可行性。
