基于贴近摄影测量技术的配网设备精细化建模
2022-08-02陈斯炯
陈斯炯
(广东电网有限责任公司汕头澄海供电局,广东 汕头 515800)
0 引言
2020年11月,中国南方电网有限责任公司发布《数字电网白皮书》[1],为支撑企业向智能电网运营商转型,支撑数字中国建设,提出建立具有灵活性、开放性、交互性、经济性、共享性的数字电网。数字电网建设的关键是电网数字化技术,通过物理场景在数字世界的高精度还原,结合生产环节的数据支撑,打造新一代的数字孪生电网。
2020年底,工业4.0研究院启动了“数字孪生+”战略,开始跟行业场景紧密结合,数字孪生电网应运而生。2021年7月,数字孪生体联盟发布《数字孪生电网白皮书——电力企业数字化转型之道》[2],把数字孪生电网分为1.0、2.0和3.0三个发展阶段,对基础设施、平台和应用提出了不同要求。当前,电网行业正处于数字孪生电网建设的1.0阶段,其中,数字孪生基础设施的建设是数字孪生电网的基础。为深化数据融合,实现更丰富的数据驱动效果,应搭建好数字孪生基础设施框架,完成初级的数字孪生化(即DTL1)。在高精度数字孪生体的构建过程中,结合传统的实践方式,引入新的技术手段是十分必要的。
当前,数字孪生体的构建多采用倾斜摄影测量和近景摄影测量两种方式。倾斜摄影测量通过无人机搭载五向镜头或具有云台的镜头,在高空对被测区域进行1个垂直、4个倾斜共5个不同角度的影像采集,实现快速且真实还原三维地物信息。但是,高空采集影像会导致物体下部细节丢失,在环境复杂且对模型精细度要求高的环境中并不适用。近景摄影测量利用搭建脚手架或手控无人机等拍摄基站对被测物体进行图像采集,在采集过程中,需要与电网设备保持足够的安全距离,无法靠近拍摄;而利用无人机等设备进行手动采集,难以保证图像重叠率和飞行效率,给外业采集人员带来了较大麻烦。
因此,本文提出了一种基于无人机贴近摄影测量技术的配网设备精细化建模方法。通过配网实际案例阐述技术流程,探究利用多旋翼无人机对配网设备进行低分辨率模型获取、测量目标绘制、贴近摄影航线规划、贴近摄影自动采集及三维重建等过程,并对精细化模型精度进行分析,为配网基础设施的数字孪生化提供了一种低成本、高效率、高精度的实景建模方式。
1 实验概况
本次实验位于广东省汕头市辖区内某10 kV配电架空线路,实验对象为10 kV中压配网架空线路终端耐张塔及塔上断路器、隔离开关等设备,该耐张塔相对高度约为18 m,距塔身左侧约15 m有高层建筑物,前后两侧均有低于塔身的树木及路灯柱,周边环境较为复杂,具有配网架空线路运行的典型环境特征。由于倾斜摄影测量精度不足、近景摄影测量效率低且风险较大,为建立设备精细化几何模型台账,提高电网基础设施数字孪生化水平,完善数字电网的建设,实验采用贴近摄影测量技术对该设备进行精细化实景建模。
贴近摄影测量技术是基于倾斜摄影测量的精细化建模方式,适用于对非常规地面或人工物体表面的图像采集[3]。该方法利用多旋翼无人机对物体所在区域进行倾斜摄影建模获取初始场景信息,通过分析物体的立面或柱体,规划贴近摄影测量航线,自动拍摄高分辨率图像,并通过软件进行三维重建,实现物体的精细化实景建模,还原其纹理及空间信息,流程如图1所示。其中,对模型精度造成主要影响的有像片重叠率和影像分辨率两个变量。
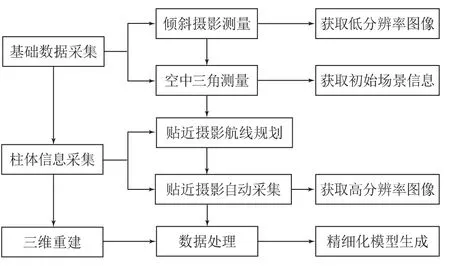
图1 贴近摄影测量流程图
1.1 像片重叠率
根据低空数字航空摄影相关规范中对像片重叠率的要求,航向重叠率一般应保持在60%~80%,且不能小于53%;旁向重叠率一般应保持在15%~60%,且不能小于8%[4]。
确定测区后,通过测区的面积确定飞行航向以及飞行航线长度,根据公式(1)计算可得出摄影基线长度,根据公式(2)计算可得出航线间隔宽度。
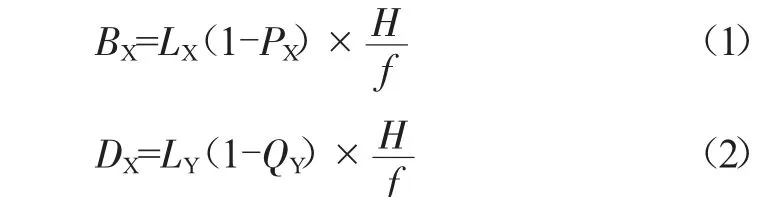
式中:BX为实地摄影长度;DX为实地航线间隔宽度;LX为像幅长度;LY为像幅宽度;PX为航向重叠率;QY为旁向重叠率;H为相对航高;f为相机焦距。
1.2 影像分辨率
摄影测量中,根据公式(3)可知,影像分辨率受到目标拍摄距离、相机焦距和像素大小的影响,直接影响模型精度。

式中:GSD为影像分辨率;pixel_size为相机像素大小;f为相机焦距;d为目标拍摄距离。
2 配网设备精细化建模实现
2.1 设备选用
本文选用Phantom 4 RTK无人机作为执行航摄任务的平台,该设备搭载RTK定位模块及高分辨率云台相机,可采集具有POS信息的高分辨率图片,其由于集成度高、体积小等特点,适用于复杂环境下的采集作业,具体参数如表1所示。
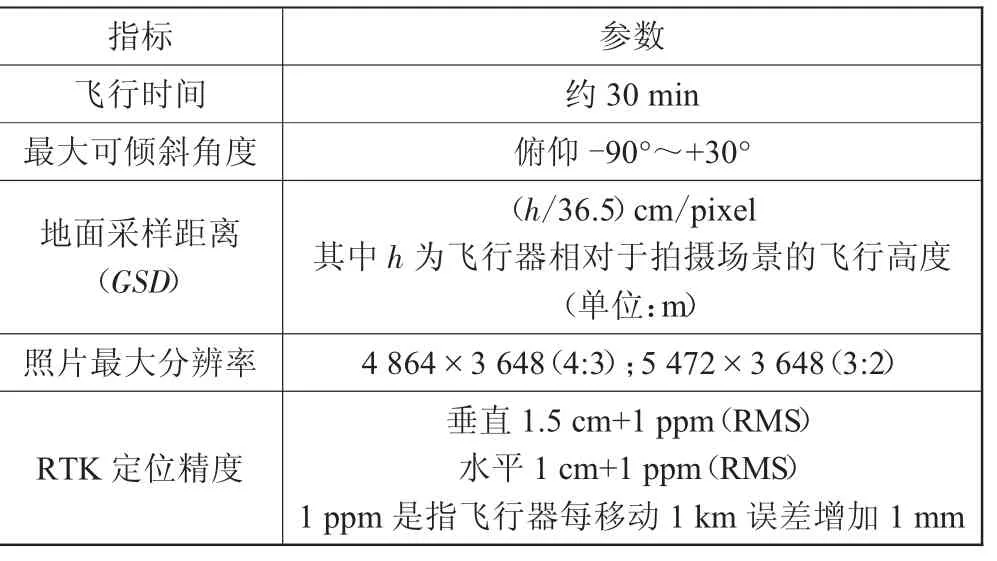
表1 Phantom 4 RTK详细参数
2.2 初始场景信息获取
本次实验划定初始场景范围为341.0 m2,考虑到测区附近有高层建筑物,为确保安全飞行,设置飞行高度45 m,云台倾斜角度-60°,航向重叠率80%,旁向重叠率80%,自动生成五向航线,如图2所示;然后使用Phantom 4 RTK执行航线完成采集,整理采集所得到的35张像片并进行空中三角测量,完成低分辨率粗略场景信息的获取。

图2 初始场景倾斜摄影航线规划
2.3 贴近摄影航线规划
基于贴近摄影测量技术的配网设备精细化建模的关键技术为贴近摄影航线规划。由于初始场景信息分辨率较低,无法清晰还原设备本体外观状态,但杆塔本体相对于周围环境而言较为突出,因此本次实验将其拟合描述为长方体,长与宽均为俯视情况下该耐张塔的最大长度和宽度,高度为耐张塔高度,示意图如图3所示。

图3 柱体拟合示意图
所拟合的长方体以每条边为基础建立对应且相互闭合的立面,分别对12个立面进行航线规划,结合立面航线规划的结果形成闭合航线,得到长方体的默认贴近航线结果,航线设计参数如表2所示。再根据初始场景障碍物信息,如导线、树木等对航点及航线位置进行微调,得到安全且高效的航线规划结果,如图4所示。

表2 航线设计参数
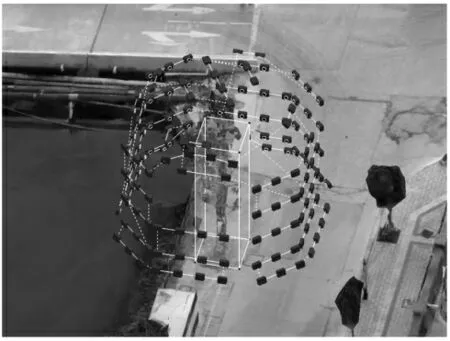
图4 航线规划结果示意图
2.4 三维重建
本次实验贴近摄影航线共采集高分辨率图像156张,结合初始场景原始数据,利用大疆智图软件进行空三计算及三维重建,该软件具有运算效率高、重建速度快、支持多种格式模型同时生产等特点。软件运行环境参数如表3所示。
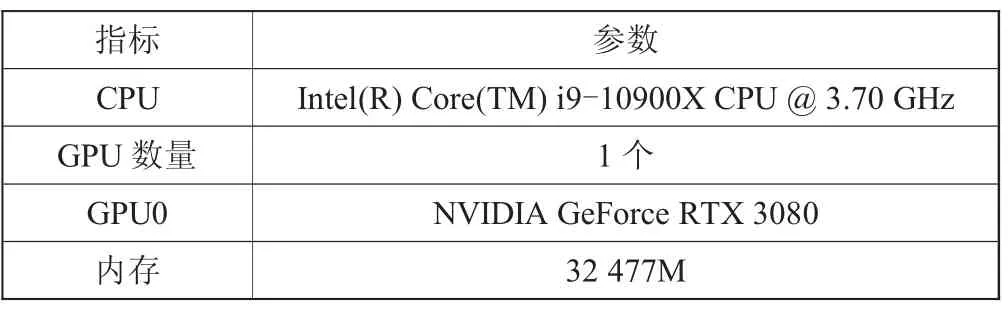
表3 软件运行环境参数
空三计算耗时1.849 min,重建耗时19.192 min,完成二维正射影像TIF、三维点云LAS及三维模型OSGB三种成果的重建工作。
2.5 精度分析
本次实验对象为在运设备,根据数据保密要求详细坐标暂不列出。选取被测对象两处易测量且规则的物体进行测量。实验一为配网测控终端,如图5所示;实验二为配网自动化馈线终端,如图6所示。
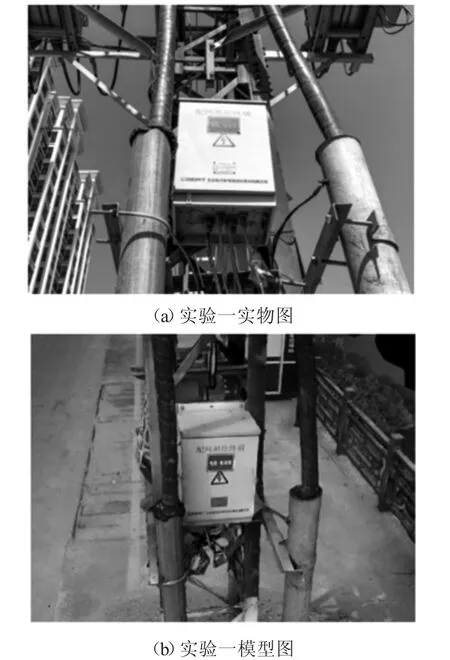
图5 实验一组图

图6 实验二组图
通过将现场实际测量数据与模型测量数据进行对比,测量对照结果如表4、表5所示。

表4 实验一测量结果 单位:cm
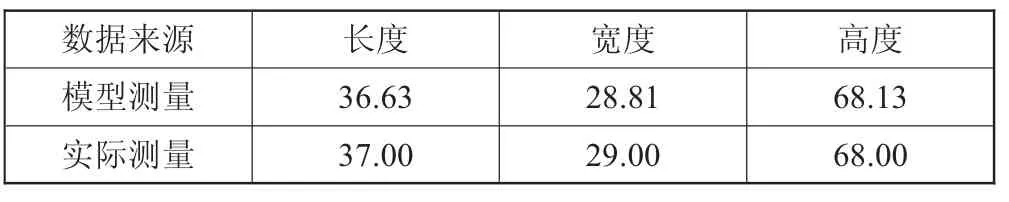
表5 实验二测量结果 单位:cm
针对数据分析,利用贴近摄影测量采集实验对象数据后,模型误差为0.20 cm左右,精度误差统计表如表6所示。
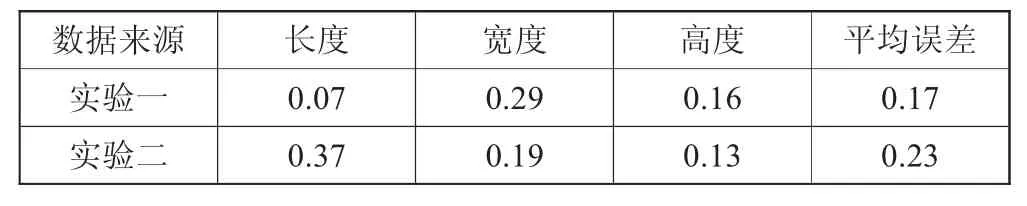
表6 精度误差统计表 单位:cm
通过倾斜摄影测量模型与贴近摄影测量模型的对比,模型精细程度满足高精度数字孪生体建设需求,如图7所示。
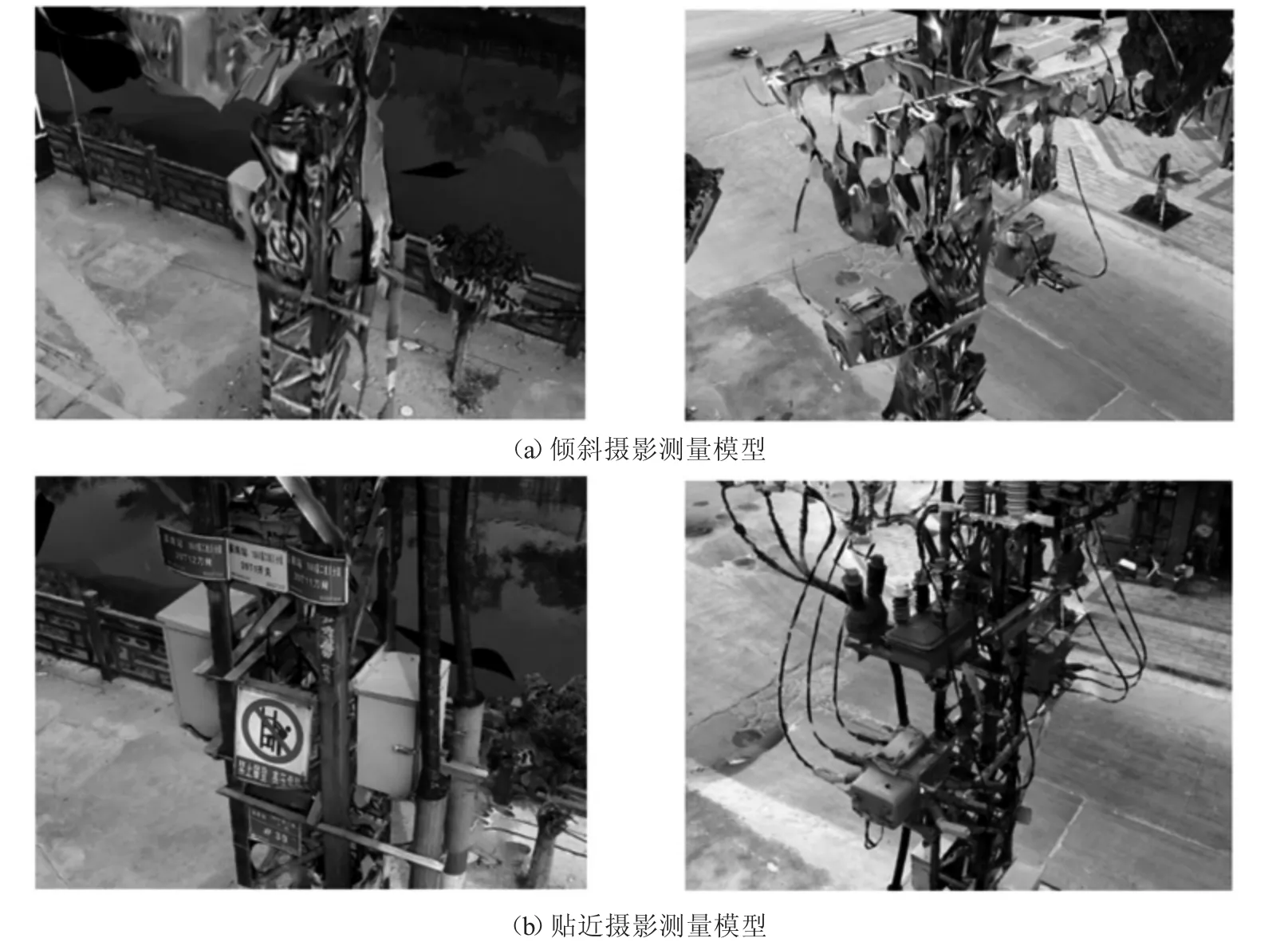
图7 模型精细程度比较组图
3 结语
在电网数字化转型的过程中,持续推进数字孪生电网1.0基础设施建设,引入新技术不断完善初级的数字孪生化势在必行。本次实验利用无人机高度集成化的发展趋势,结合贴近摄影测量技术实施思路,在降低成本、提高效率的前提下对配网设备进行建模。结果充分证明,无人机贴近摄影测量技术运用在配网设备精细化建模中是可行的,其有效解决了倾斜摄影测量精度不足、近景摄影测量效率不高的问题。
当然,贴近摄影测量技术用于配网架空线路精细化模型图像采集仍存在局限性,比如:在杆塔等设备贴近建筑物时,无法全方位进行贴近摄影图像采集,会影响建模效果;架空线路导线目标较小,难以完全还原其物理特征,需人工进行拟合;在大范围采集时,需人工对被测物体进行拟合,效率较低。因此,在下一步工作中,如何自动拟合被测物体、如何自动生成高效航线、如何运用多种设备进行融合拍摄将成为研究的重点。