基于PLC 控制的机电一体化设备的安装与调试
2022-08-02张保学
张保学
(甘肃一安建设科技集团有限公司, 甘肃 兰州 730000)
引言
可编程逻辑控制器简称PLC 技术,其所实施的功能主要在于以采集、内部存储和程序运行相关数据的结果更新对设备进行输出的状态。其实在应用该技术的过程中,需要分开研究PLC 和PLC 控制技术,二者主要还是结合PLC 中的控制程序来自动化控制相关的机电设备。但是目前基于现阶段的发展来看,基于PLC 技术控制过程中,不仅输入和输出存在必然的联系,就其本身的过程来讲,也是结合多种程序来对一个过程进行全面辅助。
1 PLC 机电控制系统的原理
随着科学技术的不断发展,在现有的工厂环境中如果所使用的设备不能及时去抵抗外界的干扰,那么整个工程的设备系统稳定性与可靠性将会被大面积降低。而对于使用PLC 技术的相关过程而言,以专业人员的操作来充分了解PLC 机电控制系统结构和原理,进而实现对PLC 控制电路进行科学调试。
一般来讲,在PLC 控制系统化的结构上,其包含CPU 模块、输入与输出模块、独立电源、编程软件和其他一些外在的部件等。每一个部件都存在不同的功能,在CPU 模块的调度下来完成相关设备的实时控制[1]。在系统实际调试和安装过程中,需要在整体功能结构上加以实施,并且先分析构件的实际功能,随后设计具体的分析思路,进而对系统控制功能和工作任务来进行解析,再结合逻辑方程和一些其他的语言来编写用户程序,进而实现系统的最终测试。
2 基于PLC 控制技术的机械手工艺流程
在实际机械手施工流程中,主要安装的位置是流水线、抛光机和装箱机等部分,进而对这三个位置之间的构件进行空间转换。以现阶段的系统控制方法,可以分为手动和自动两种方式,其中以自动控制为例,其具体的操作顺序如表1 内容所示。
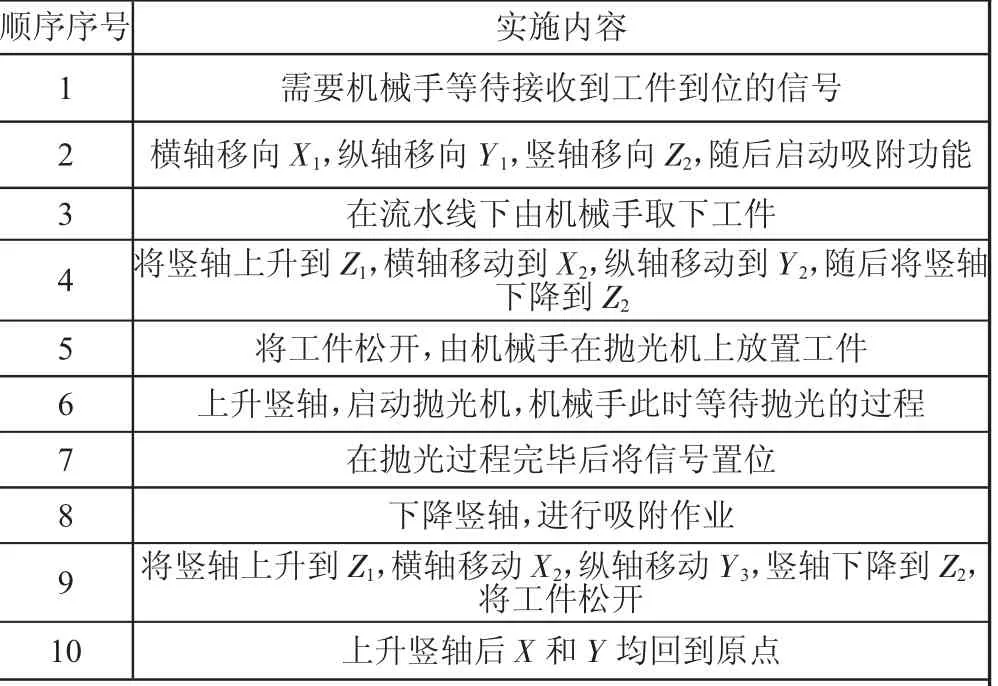
表1 机械手自动操控顺序
本次机械手设计共分为三个轴,其中X 轴上存在X1、X2和X3三个工位;在Y 轴上存在三个工位,分别为Y1、Y2和Y3;在Z 轴上存在两个工位,分别为Z1和Z2。在吸盘的装置上其具有吸附和松开两种工作内容。而在X 轴上的行程分析中,等于900 mm,利用伺服电机进行驱动处理;而Y 轴则采取直流电机进行驱动,行程为600 mm。本次机械构件所采取的是滚珠丝杠,Z 轴的行程为300 mm,采取气缸进行驱动。
3 系统硬件结构设计
3.1 结构分析
根据实际定义区分,可以将其分为多种形式,且在这些形式的分析中其也有着不同的种类要求。如果根据手臂坐标类型来区分,可分为直角坐标式、球坐标式、圆柱坐标式、关键坐标式。本研究以直角坐标式来设计机械手,包含导轨、机械手臂和机座三个自由度。其中机械手臂主要是未来完成各个工件之间的位移。且这三个自由度做直线运动,分别在X、Y 和Z 轴上实施运动,最后执行的机构由气动吸盘来实现。而需要执行的部件其中包含滚珠丝杠和驱动电机等内容。在Z 自由度上包含控制气缸和气动吸盘,其中气动吸盘主要负责对工件的吸取和控制以及执行。其中具体的构造如下页图1 所示。
3.2 控制电路
以输入与输出结构电路来连接机械手和PLC 控制系统,并根据电路中的输入信号来促使PLC 可吸收和控制各种信号和数据,且PLC 也会通过输出接口电路来对被控对象输出处理结果,进而达到自动化控制的效果[2]。本次所采取的PLC 是三菱的FX2N-64MT系列,输入与输出点均为32 个。输入电压为DC24 V,电流为5 mA;输出外部单元为DC5-30 V,最大输出负载为0.5 A/点,每四个点不能超出0.8A。
3.3 伺服控制系统
伺服系统主要是为了保障与控制被控对象的某种状态稳定性所设计的系统形式,促使该被控对象能够自动、精准与连续复现输入信号的变化规律,因此其也被称为“随动系统”。结合伺服系统的要求和具体情况,本次控制系统选择交流伺服和半闭环控制系统。其中硬件选择三菱系列的PLC 和驱动器、电机以及编码器等。基于本次两部电机的控制要求,选择差动驱动的方式作为脉冲输入的方式,总体框架如图2所示。
3.4 气动系统
一般的气动系统在介质选择上以气体压缩为主,结合气体的压力来传递其系统动力,或者采取信息流体传动技术,经由控制阀和管道将压缩空气输送到气动执行元件上,以此来将气体压缩的压力转化为机械能[3]。实际过程中其包含气压的传动和气动控制两个重要方向。现阶段理想气体的状态方程是气动技术的理论基础,而这期间所指的理想气体其实是指没有任何粘性和存在一定质量的气体形式。在某一平衡状态下的瞬间其可有如下的气体方程:
式中:p 表示绝对压力;V 为质量体积,m3/kg;ρ 表示气体密度;T 表示热力学温度,K;R 为气体常数,J/(kg·K,其与气体的湿度情况有关,基于气动系统方程可对气动的控制系统进行控制。
4 PLC 控制的程序设计与运行结果分析
结合对各个模块设计与分析,根据机械手在PLC自动化控制下的运行要求,本次所设计的机械手主要用于吸附流水线上的各种构件,该构件主要是亚克力板材,质量需要保持在10 kg 以下,随后再对系统进行调试与改进后才能够进入到实际工作中。且根据现场的运行效果显示,机械手有着十分平稳的运行状态,并且其与预定的精度有着符合的趋势。
而基于对亚克力板材的特征分析,其本身冷热膨胀系数较大,因此需要在实际运行中考虑到其所预留的伸缩间隙。同时环境温度需控制在85 ℃以下。在搬运期间使用气动吸盘进行辅助,避免破坏板材的表面的保护膜和保护纸。
系统测试选择手动与气动两种形式。在手动方式下可结合相对应的控制按钮,实现机械手的左移、右移等动作;在自动运行的方式下,能够结合相关流程进行动作。
结合编写的控制程序来测试该系统,机械手可以结合要求进行相对应动作的实施。在机械手运行期间,接收到工件到位信号后横轴运行到X1位置,纵轴与竖轴分别都运行到Y1和Z1的位置。随后等到机械手回到原点后,再去等待下一个信号,进而在反复的运行中实现流水线的工件吸附作业。
经过各项测试结果表示,本次所设计的机械手能够达到预期的功能要求,可结合PLC 自动控制系统来进行准确的操作。
5 结语
基于PLC 控制技术探讨机械手的相关系统设计,其中包含硬件系统、控制电路、伺服系统和气动系统,最终结合相关运行的结果表示该机械手运行十分平稳,可实现精准控制效果。
