基于LCMV准则的空时极化联合抗干扰算法
2022-08-02吕婷婷周曼丽李昊阳
金 鸣,吕婷婷,周曼丽,李昊阳,曹 源
(1.中国人民解放军军事科学院 系统工程研究院,北京 100091;2.中国海洋大学 信息科学与工程学部,山东 青岛 266100)
0 引言
卫星导航通过卫星发送信号,可以实时、高精度地获取用户的地理位置[1-3]。随着我国北斗卫星导航系统的建设与完善,其相应的技术产品已经在各种领域得到了广泛的应用。通常,卫星导航接收机的工作环境是十分复杂的,并且极易受到干扰电磁波的影响,虽然北斗卫星接收机有一定的抗干扰能力,但是卫星信号的发射功率弱,甚至到达卫星接收机时的卫星信号的功率比噪声功率还要低,因此需要提升卫星接收机的抗干扰能力。
空域滤波是一种消除干扰的有效方法[4],其实质是通过对各阵元加权进行空域滤波,可以对空间信号到达方向(Direction of Arrival,DOA)进行信号增强,同时在干扰方向上形成零点,达到抑制干扰信号的目的[5]。空域滤波可以从空间区分信号和干扰的来向,是卫星接收机消除干扰的有效方法。随着技术的发展,为了提高抗干扰的性能,人们开始考虑多维域联合的抗干扰方式,在空域滤波的基础上,提出了空时自适应处理(Space-Time Adaptive Processing,STAP)技术,在不增加阵元数目的前提下,同时利用信号的空时以及空频二维域信息,增加阵列抗干扰的自由度[6],将空域滤波扩展到了空时二维域,增强了频率维的分辨力。空域滤波和空时自适应滤波都存在缺点,当期望信号和干扰信号DOA相同时,会把实际期望信号作为干扰,在其方向上形成零陷,导致期望信号相消;而且以往抗干扰的处理方法都是基于标量接收阵列的,忽略了信号的极化信息。尽管STAP已将空域和时域相结合以消除干扰,但是极化域是抑制干扰的另一个领域。
电磁波的极化是一种可以利用的重要特征信息[7-9]。由电磁矢量传感器构成的极化敏感阵列在极化域的敏感能力和较强的抗干扰能力为北斗卫星接收机抗干扰提供了一种新思路,阵列的自适应抗干扰技术也得到了长足的发展[10]。极化敏感阵列(Polarization Sensitive Array,PSA)[11]是一种能够灵敏感受到信号极化信息的阵列,一个典型的极化敏感阵元包括3个正交的磁偶极子和3个正交的电偶极子,能够完备地接收空间中的各电磁分量[12]。由于北斗导航卫星信号的极化状态为右旋圆极化,可以根据这一极化特性,利用PSA极易区分,为卫星抗干扰提供新思路。PSA既可以获得信号的空间来向信息,又可以获得信号的极化状态信息,所以可以从极化域、空域两方面对接收信号进行处理,加入极化域的维度,实现多维域联合抗干扰。与传统阵列天线相比,具有分辨率高、检测性能稳健、抗干扰能力强和极化分集等优点[13],使得其具有广阔的应用前景[14]。极化空域自适应滤波算法是将空域滤波扩展到极化域、空域二维域。PSA可以充分利用空间电磁波信号的极化状态信息来分辨期望信号和干扰抑制信号。极化空域自适应滤波和空时自适应滤波都属于联合域抗干扰,是空域滤波的扩展,意在从多维域的角度提高抗干扰性能。
基于导航抗干扰的背景,西北工业大学的学者提出了改进的联合极化与空域的自适应方法,采用7阵元的极化敏感圆形阵列的线性约束最小方差(Linear Constrained Minimum Variance,LCMV)准则来抑制干扰,能够有效抑制期望信号和干扰信号来波方向相同的干扰,并且适用于导航信号处理[15-16]。重庆大学的学者采用了4阵元的极化敏感圆形阵列的LMS算法也得到相同的抗干扰效果[17]。王云爽[18]运用四元数来降低空时极化抗干扰算法的运算量。王海洋等[19]提出了一种基于MVDR准则的新型空时极化自适应(Space-Time-Polarization Adaptive Processing,STPAP)处理波束形成算法,仅使用一个自适应滤波器就可以一次处理多个GNSS卫星,大大降低了计算复杂度。杨灵雪[10]研究了北斗导航联合域自适应抗干扰算法,验证了联合域抗干扰性能,得到了空时极化比极化空域[17]的输出SINR高6 dB的结论[7]。文献[20-21]研究了双极化天线阵列在GPS接收机抗干扰中的应用,并且有很好的抗干扰性能。谢明[22]针对高动态环境下零陷失配的问题,得到了高动态环境下基于空时极化协方差矩阵锥的稳健的干扰抑制算法。
本文在前人所做工作的基础上,提出了一种应用于北斗卫星接收机的STPAP抗干扰算法。利用信号的极化特征,将极化域信息引入传统空时自适应算法,在基于LCMV准则下,可以从空域、时域、极化域进行滤波。当期望信号与干扰信号来向相同时,可以从极化域上对其他极化形式的干扰形成零陷,进行有效滤波。
1 PSA信号模型
1.1 极化模型
直角坐标系与球坐标系变换示意如图1所示。
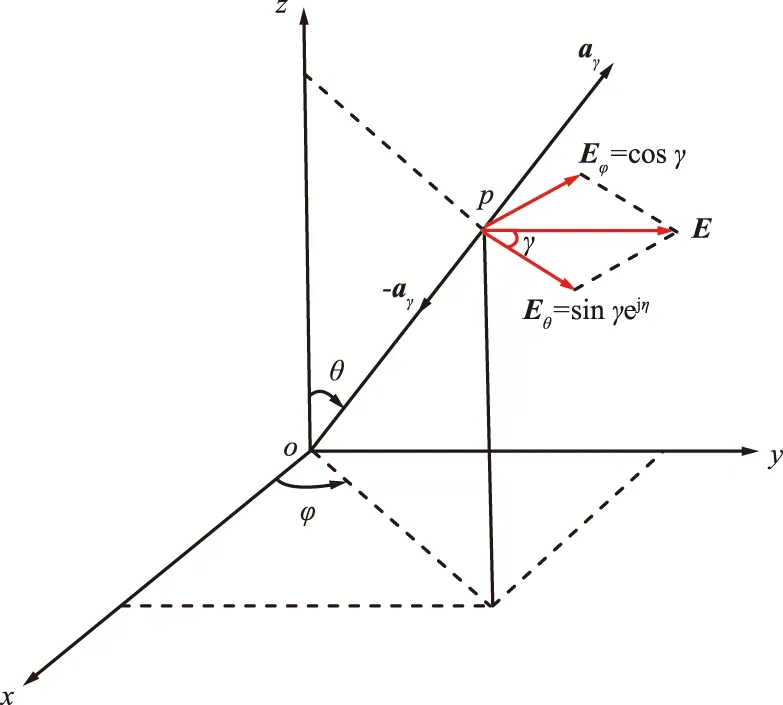
图1 直角坐标系与球坐标系变换示意Fig.1 Schematic diagram of transformation between rectangular coordinate system and spherical coordinate system
假设极化阵元放置于直角坐标系的原点。来波方向θ为z轴正半轴到来波方向的角,θ∈[0°,90°];φ是方位角,φ∈[0°,360°]。电磁辐射源位于球坐标系p点,一个完全极化的电磁波的电场矢量为E=Eθeθ+Eφeφ,Eθ和Eφ分别为eθ和eφ方向上相互正交的电场分量。电场分量的大小为Eθ=sinγejη,Eφ=cosγ,γ是极化相角,γ∈[0°,90°];η是极化相位差,η∈[-180°,180°]。当η=0°或η=±180°时,电磁波为线极化波;当γ=45°,η=90°时,轨迹的转向和波的来向符合左手螺旋定则电磁波,称为左旋圆极化(Left-handed Circular Polarization,LHCP)波;当γ=45°,η=-90°时,轨迹的转向和波的来向符合右手螺旋定则,称为右旋圆极化(Right-handed Circular Polarization,RHCP)波。阵元接收信号完备的极化矢量[23]为:
(1)
1.2 接收信号模型
本文PSA是由M个正交偶极子对构成的均匀线阵(Uniform Linear Array,ULA),各个阵元沿y轴正半轴均匀分布,间距d为半波长,即d=λ/2,双极化ULA的阵列结构如图2所示,方位角φ取90°。
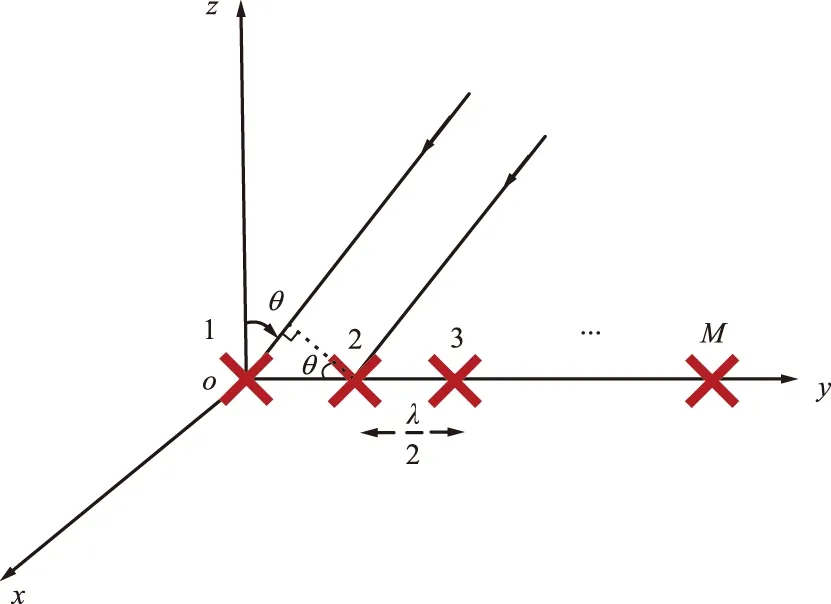
图2 双极化ULA的阵列结构Fig.2 Array structure of dual-polarization ULA
极化空时滤波阵列结构在M个阵元PSA的基础上给每个极化通道增加了K个抽头数、采样周期为Ts,采样数为L的FIR滤波器,从空域、时域、极化域对干扰进行滤除,其结构如图3所示。
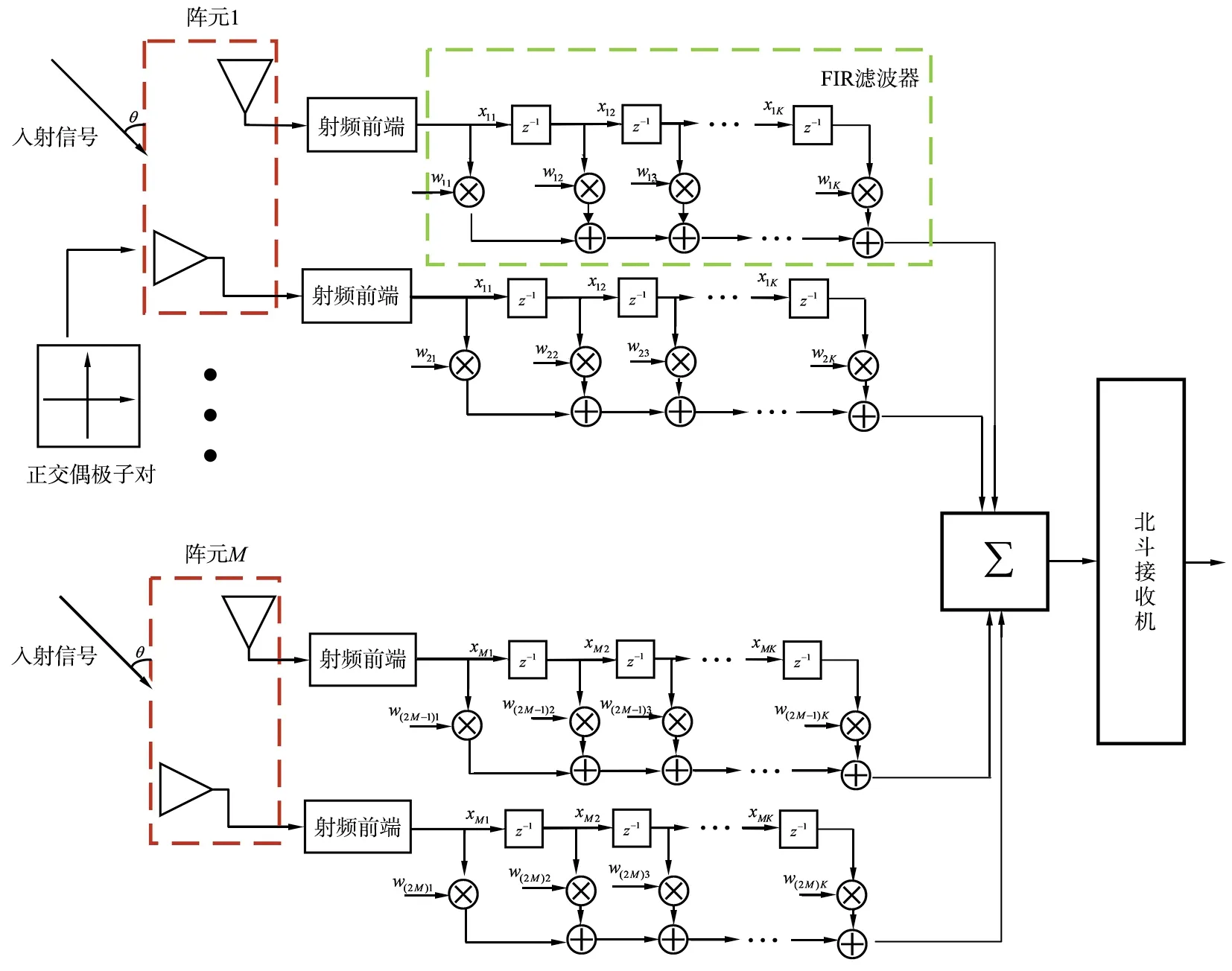
图3 空时极化滤波结构Fig.3 Structure diagram of space-time polarization filter
PSA接收到的信号可以表示为:
X(n)=As(n)+J(n)+U(n),
(2)
式中,A为联合导向矢量矩阵;s(n)为信号幅度矢量;J(n)为干扰信号矩阵;U(n)为复高斯白噪声。在第n(1≤n≤L)个采样时刻得到的接收信号矩阵为:
X=[x11(n)…x1K(n)…xM1(n)…xMK(n)…x2M1(n)…
x2MK(n)]T。
(3)
对于STPAP算法,接收信号模型的联合导向矢量矩阵为空域、时域和极化域的联合导向矢量,即空域导向矢量、时域导向矢量和极化域导向矢量的Kronecker积。
ULA阵列的M×1维的空域导向矢量为:
(4)
由于ULA阵列是由沿x轴和y轴的正交偶极子构成,故式(1)取前两项,且方位角φ=90°,则阵列的2×1维的极化导向矢量为:
(5)
ULA阵列的K×1维的时域导向矢量[21]为:
st(f)=[1exp(-j2πfTs)…exp(-j2π(K-1)fTs)]Τ,
(6)
式中,f为信号中心频率。
接收信号模型的联合导向矢量为:
sstp(θ,f,γ,η)=ss(θ)⊗st(f)⊗sp(θ,γ,η),
(7)
式中,⊗为Kronecker乘积。
若有P个期望信号和Q个干扰信号,则完整的接收信号xstp(n)可以表示为:
(8)
2 STPAP处理算法
若期望信号的来向通过来波方向估计完全已知,且已知北斗卫星信号为RHCP信号,则可以将LCMV准则运用到STPAP抗干扰算法中。
LCMV准则的基本思想是在期望信号和信号形式完全已知且保证对期望信号方向增益达到一定值的条件下,计算最优权矢量,使阵列输出功率最小。
式(8)接收信号模型通过图3 STPAP处理之后,阵列的输出信号模型可表示为:
y(n)=wHxstp(n),
(9)
式中,w为2MK×1维的权向量,上标H表示Hermitian矩阵,其可表示为:
w=[w11…w1K…wM1…wMK…w2M1…w2MK],
(10)
则输出信号功率为:
(11)

(12)
式中,L为采样数。
为了保证在P个期望信号方向上正确接收,在Q个干扰信号方向上形成零陷抑制干扰,关于权向量约束条件可以表示为:
CHw=f,
(13)
式中,C为2MK×(P+Q)维约束矩阵;f为响应向量,则有:
(14)
(15)
则优化数学模型为:
(16)
通过拉格朗日乘数法,求得LCMV的最优权向量:
w=R-1C(CHR-1C)-1f。
(17)
3 仿真比较
本文通过Matlab软件对上述算法进行仿真验证。本节主要分析比较了传统STAP算法和本文所提出的STPAP算法在卫星期望信号和干扰信号来向相同和不同时以及极化状态相同和不同时的滤波效果和性能。仿真中的基本参数如下:载波频率f0=1 561.098 MHz,采用8阵元线阵(即M=8),FIR滤波器的抽头数为3(即N=3),采样点数L=1 024,期望信号信噪比(SNR)都为-20 dB,干扰信号干燥比(INR)都为50 dB。期望和干扰信号来波方向不同且极化状态相同。
若通过DOA估计得到3个期望信号的来波方向为20°,50°,80°,3个干扰信号的方向为10°,30°,60°,极化状态均为RHCP波,即γ=45°,η=-90°。传统STAP算法和本文STPAP算法的仿真结果如图4和图5所示。
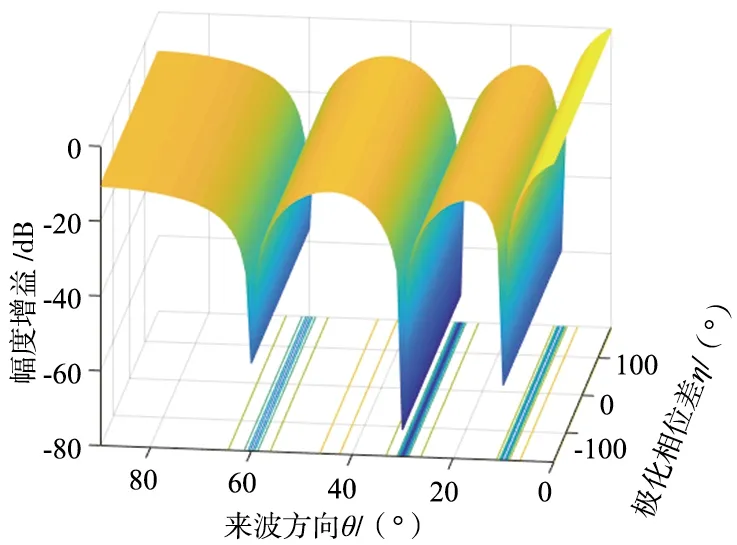
(a) 阵列三维方向图
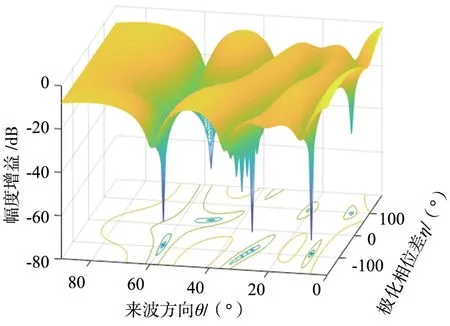
(a) 阵列三维方向图
由图4和图5可以看出,在期望和干扰信号来波方向不同且极化状态相同时,二者都可以在卫星期望信号来向上形成增益;STAP算法可以在干扰方向上形成约-60 dB的零陷,将干扰完全滤除;STPAP算法可以在干扰方向和极化相位差相交的方向上形成约-60 dB的零陷,将干扰完全滤除。在此情况下,STAP算法和STPAP算法表现相同,都可以达到滤波效果,且STPAP算法会在信号对应的η方向上形成零陷。在实际应用中,该算法可以有效滤除经过多次反射的RHCP信号或除期望信号来向上的信号。
若通过DOA估计得到的3个期望信号的来波方向和干扰信号的方向均为20°,50°,80°;干扰信号方向为20°,80°时,极化状态均为LHCP,即γ=45°,η=90°;干扰信号方向为50°时,极化状态为线极化,即η=0°。STAP算法和STPAP算法的仿真结果如图6和图7所示。
由图6和图7可以看出,当期望和干扰信号来波方向相同且极化状态不同时,STAP算法不能将期望信号和干扰信号分开,虽然在干扰信号方向上形成了零陷,与此同时也抑制了期望信号,严重影响了期望信号的接收; STPAP算法可以从极化域上将期望信号和干扰信号分离,可以干扰信号方向和极化方向上形成约-60 dB的零陷将干扰滤除,同时在期望信号方向上保持增益,达到滤除干扰、保持期望信号的目的。在此情况下,STPAP算法表现出了比STAP算法更优异的性能。STAP算法在空域和时域上无法将期望和干扰信号分开,会将期望信号和干扰信号一同抑制,在滤除干扰信号的同时也滤除了期望信号;STPAP算法增加了极化域的维度,可以从极化域的维度上将期望和干扰信号分离开,从极化域上形成零陷,滤除干扰。STPAP算法避免了STAP算法在期望信号和干扰信号来波方向相同时会同时被滤除的弊端,显示出了优势,通过空域、时域和极化域三维联合的方式,达到滤除干扰、保留期望信号的目的。
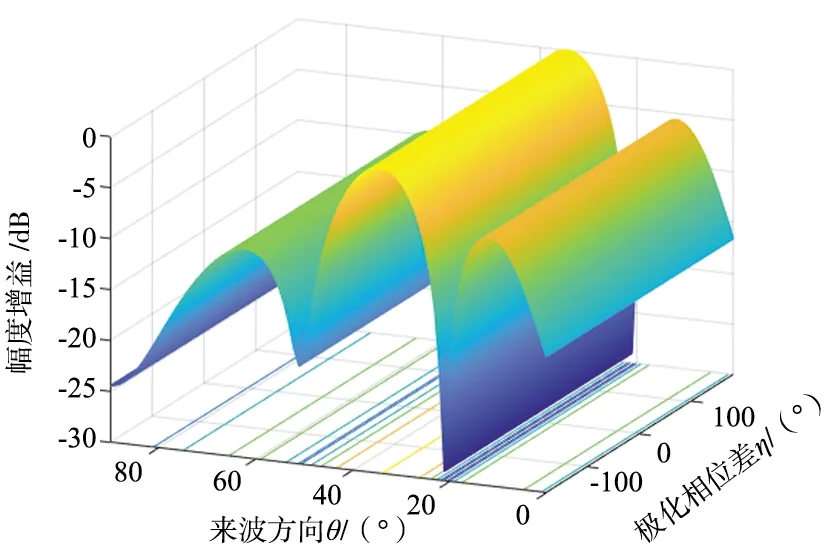
(a) 阵列三维方向图
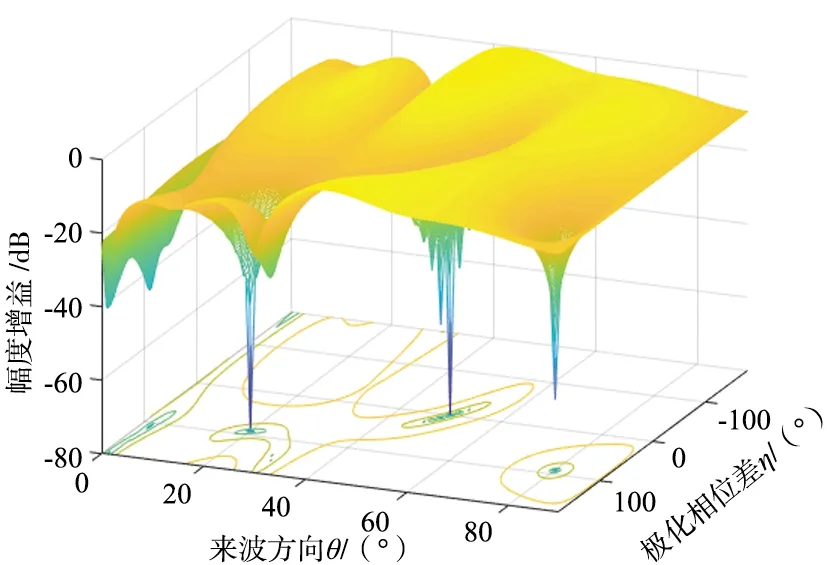
(a) 阵列三维方向图
4 结束语
本文的一种用于北斗卫星接收机的STPAP抗干扰算法的基本思想是在LCMV准则下,将STAP算法引入到PSA线阵中,在传统STAP算法的基础上增加了极化域信息,实现了空域、时域和极化域三维联合滤波。通过仿真分析了STAP算法和STPAP算法在期望信号和干扰信号的来波方向不同且极化状态相同,以及期望信号和干扰信号的来波方向相同且极化状态不同2种情形下的表现。仿真结果表明,STPAP算法在2种情形下都具有很好的滤波性能,弥补了STAP算法的一些不足。该算法除了能在空域、时域对干扰形成零陷外,还能在极化域上对其他极化形式的干扰形成零陷,将同向、同时的其他干扰进行有效滤除,既可以保留期望信号增益,又可以抑制干扰,达到滤波的目的。