基于关联规则挖掘的全向轮移动机器人目标跟踪控制系统设计
2022-08-02于连生崔倍宁
高 剑,于连生,崔倍宁,张 乾
(1.菏泽市科学技术信息研究所,山东 菏泽 274000; 2.单县科技成果转化服务中心,山东 菏泽 274000)
0 引言
全向轮是由主轮毂和从动轮共同组成的全方向制导型轮体应用结构,是具有自动执行能力的机器装置。近年来,随着科学技术的不断发展,全向轮逐渐成为一种关键的移动机器人加工部件,在复杂的移动环境之中,全向轮可以为机器人提供全方位的行进动力,不但能够避免因方向动力不足而引发的航迹偏向问题,还可以为整个滚轮结构组织提供足量的行进动力支持[1]。在全向轮机器人的移动过程中,受到行进速度、转向指标等条件的影响,核心主机所捕获到的目标对象并不能完全符合理想目标设定条件[2]。为避免上述情况的发生,基于ROS算法的管控系统借助传感器设备,对全向轮移动机器人所面对的目标节点进行统计,并通过对应标记的方式,帮助主机元件对这些目标节点进行实时跟踪[3]。然而在实际应用过程中,所获得目标对象的物理覆盖范围依然相对较小,并不能将理想目标完全包含在内。
关联规则挖掘是计算机科学技术领域的专有名词,其应用目的在于确定数据项集之间的相互影响关系,并可在关联性法则的作用下,建立必要的函数映射条件。现阶段,关联规则挖掘政策的应用,离不开大数据处理技术。所谓大数据处理就是在海量数据信息资源的支持下,将各个指标参量分别与初始系数进行对比,根据具体数值结果,剔除距离适用标准相对较远的指标参量,并将另一个系数指标作为下一次对比处理的初始指标参量。从实用性角度来看,“关联”能够精准反映一个事件与另一个事件之间的相互依赖关系,且随着事件累积量的增加,这种相互依赖关系虽然会变得更加频繁,但相关数据信息之间的函数映射关系却始终不会发生改变,这也是关联规则挖掘指令能够准确处理复杂数据之间相互制约关系的主要原因。
当前已有相关领域学者对全向轮移动机器人目标跟踪控制方法做出了研究。文献[4]提出基于视觉特征的全向轮移动机器人目标跟踪方法。在 TLD框架下,利用核相关滤波算法和CN色彩特性进行目标识别,实现了基于视觉特征的全向轮移动机器人运动轨迹跟踪。文献[5]提出基于激光SLAM的全方位移动机器人目标跟踪控制方法。利用激光雷达设计建图导航功能以及 ROS与下位机通讯的串行通讯,使控制系统能够顺利地完成各个方向的运动,并通过串行接口接受 ROS的速度命令,完成速度的控制。上述方法均具有一定的有效性,但全向轮移动机器人目标跟踪精度仍有待提升。
为解决全向轮移动机器人目标跟踪精度差的问题,设计基于关联规则挖掘的新型全向轮移动机器人目标跟踪控制系统。
1 机器人目标跟踪控制系统硬件设计
本文研究全向轮移动机器人对象为AGV搬运机器人,其具备路径自动导引功能,可实现360°全方向移动。全向轮移动机器人目标跟踪控制系统的硬件应用结构由CAN框架、核心管控电路、I/O跟踪模块、控制器元件四部分共同组成,具体机器人目标跟踪控制系统硬件结构如图1所示。
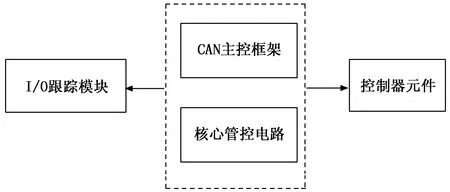
图1 机器人目标跟踪控制系统硬件结构
具体的器人目标跟踪控制系统硬件设计方法如下。
1.1 CAN主控框架
全向轮移动机器人目标跟踪控制系统以CAN框架作为基础搭建结构,具体连接结构如图2所示。可以联合收发器、控制器、单片机等多个应用元件,确定机器人目标节点与核心控制主机之间的间隔距离,由于全向机器人的实际行进长度并不确定,所以核心跟踪主机也并不能确定目标节点的具体个数,一般来说,全向机器人的行进长度越远,目标节点的个数也就越多。在CAN主控架构中,PC主机负责记录已通过机器人目标节点的所处位置,且由于接口卡设备的存在,所有记录数据都能得到长时间地存储,一方面便于跟踪主机的调取与利用,另一方面也可以实现对目标节点个数的准确统计。CAN收发器直接记录机器人目标节点当前所处位置的物理特征,并可将记录结果以传输数据的方式,反馈给下级控制器元件。为使机器人目标节点信息得到准确记录,收发器、控制器设备之间的数据传输只能保持顺向反馈状态,即已记录目标节点信息只能被数据库主机长久储存,并不能随着控制系统的运行而再次被反馈至其他应用结构之中[6]。
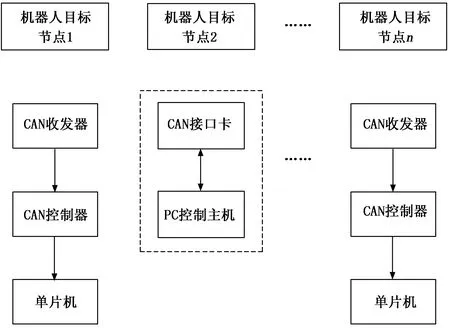
图2 CAN主控框架的结构示意图
由于系统数据库主机并不能与CAN主控框架之间相连,所以在全向轮机器人的行进过程中,单片机元件负责暂时存储与待跟踪目标节点相关的数据记录信息。
1.2 核心管控电路
核心管控电路作为唯一可以向全向轮移动机器人提供电量供应的物理元件,在实际应用过程中,能够长时间保持稳定的电信号输出状态,且随着机器人行进速度的加快,电信号的传输速率也会不断增大,直至I/O跟踪模块、转向控制器、速度控制器等下级应用元件都能接收到稳定的供应电子量[7-8]。PW4203结构作为核心管控电路中的关键连接设备,可以在整合游离电信号的同时,开启所有外部负载接口,如图3中的1、2、3、4、5、6、7、8号物理接口组织,一方面为电阻设备提供大量的传输电信号,另一方面也可以使得D1、D2两个电容元件的稳定供应状态得到较好保障。
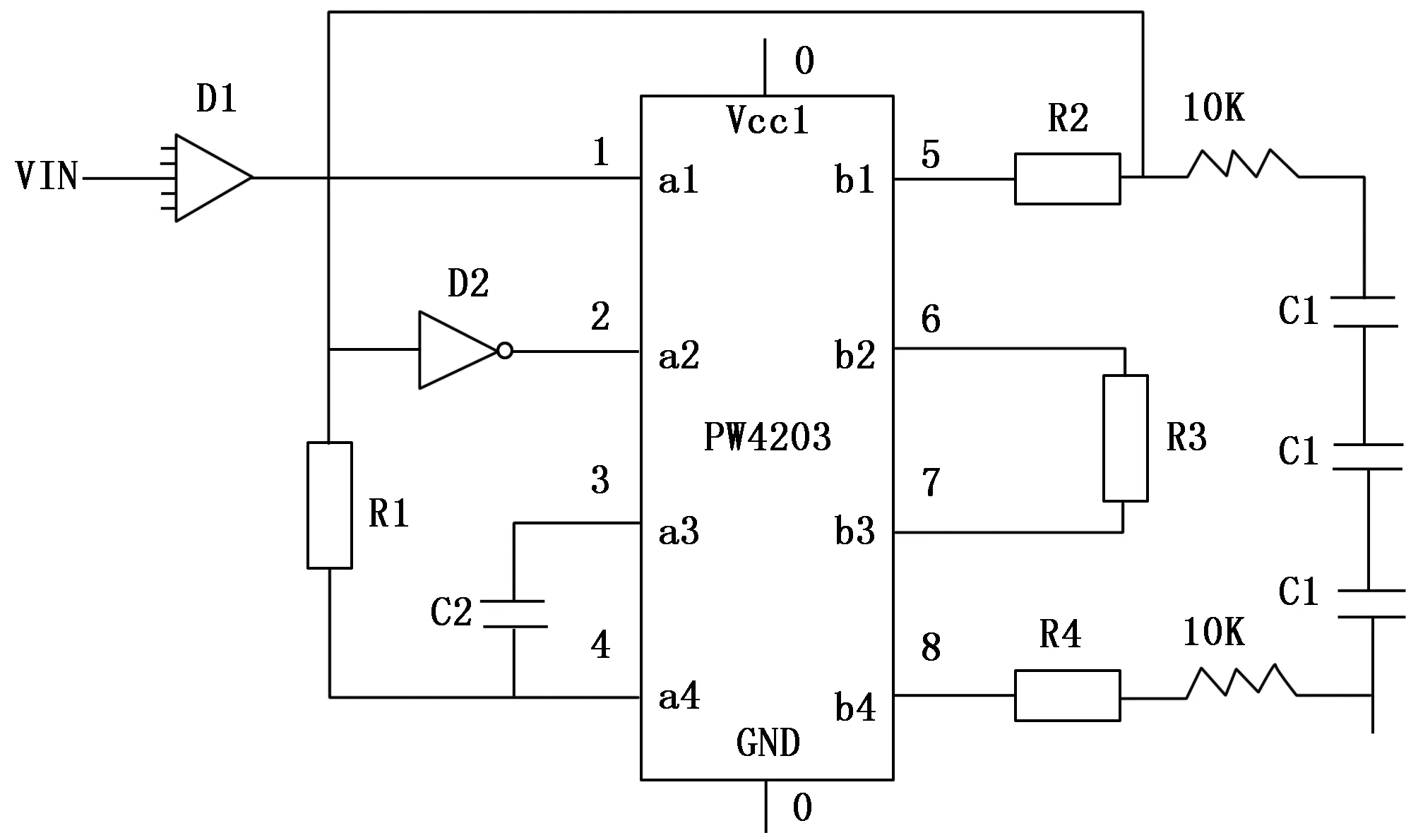
图3 全向轮移动机器人的核心管控电路
D1是一个完全开放的电容元件,允许电信号交流与直流传输行为的共同存在,对于全向机器人而言,随着其移动路程的延长,D1元件所承担的物理电压数值也会不断增大[9]。D2是一个部分开发的电容元件,只允许电信号直流传输行为的存在,对于传输于其中的电流与电压参量也只能进行一定强度的聚合处理。C类型电容、R类型电阻作为核心管控电路中的电量消耗元件,能够对全向轮机器人的移动供电提供有力保障,并使得控制主机对于待跟踪目标节点的准确记录成为了可能。
1.3 I/O跟踪模块
作为控制系统重要组成部分的I/O跟踪模块同时具备调节数字信号输入与输出行为的能力,可以在核心管控电路元件的作用下,确定已记录机器人移动目标节点的实时所处位置[10]。从功能性角度来看,I/O跟踪模块的运行规则相对较为简单,能够在核心Cortex-M3处理器结构的作用下,调节两个变电装置之间的负载连接关系,一方面促使M1主板与M2主板之间建立更加稳定的信号传输关系,另一方面也可以增强P感应元件对于机器人目标节点的判别敏感性,从而最大化激发电信号隔离器的电量屏蔽能力,使得控制主机能够对全向轮机器人在移动过程中所捕获到的目标对象进行准确跟踪。图4反映了I/O跟踪模块主板的实际连接情况[11]。
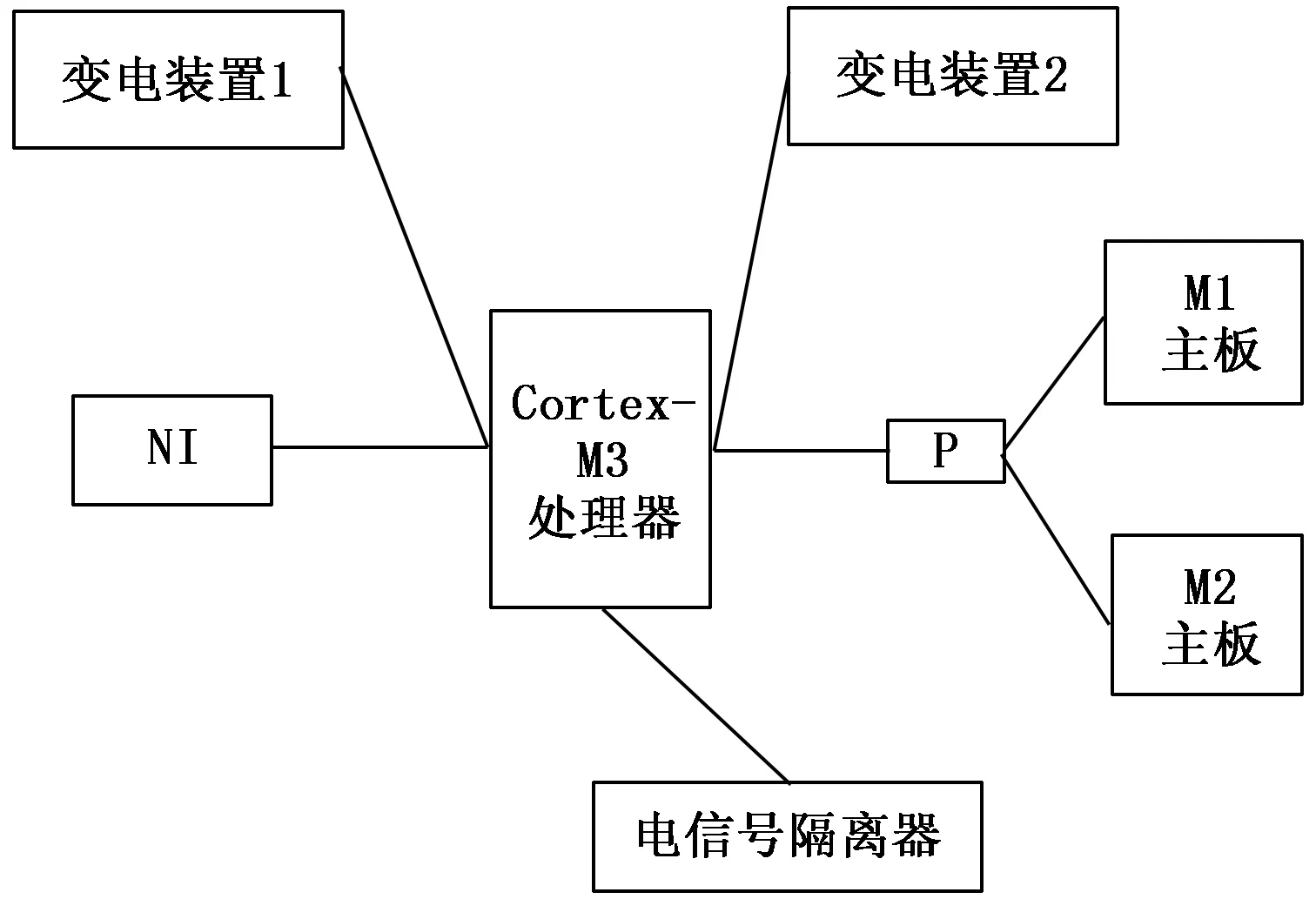
图4 I/O跟踪模块的主板示意图
对于I/O跟踪模块而言,两个变电装置对于电量信号的感知能力并不相同[12]。一般来说,变电装置1的物理内阻水平相对较低,在下级负载NI芯片的作用下,变电装置外部的施加电压能够长期保持相对稳定的数值状态;而变电装置2的物理内阻水平相对较高,随着M1主板、M2主板之间信号传输强度的增大,变电装置外部的施加电压也会呈现出不断升高的变化状态,此时已记录目标节点的数据信息会由变电装置2向着变电装置1快速传输。
1.4 控制器元件设计
系统控制器元件包含转向控制结构、速度控制结构两部分,其具体结构形式及连接作用能力如下。
1)转向控制器。
对于全向轮移动机器人目标跟踪控制系统而言,转向控制器负责管控全向轮机器人的实时移动能力,其主要连接作用行为包含如下两条执行途径。
目标节点数量较多时:在全向轮机器人快速移动的过程中,转向控制器元件会逐一记录并登记目标节点的编码形式,并可以联合系统控制主机对于节点跟踪指令的部署行为,判断全向轮机器人当前所处行为位置[13]。
目标节点数量较少时:为促进全向轮机器人的移动行进能力,转向控制器必须时刻记录已通过目标节点的编码信息,并借助传输信道将这些数据信息参量反馈回系统控制主机之中。
为保障机器人目标跟踪控制系统的实际运行能力,转向控制器结构必须负载于I/O跟踪模块下级,并对其输出的执行指令信号进行按需处理。
2)速度控制器。
速度控制器负责协调全向机器人的实时移动速度,以SK200E~SK200A作为核心协调元件。在机器人目标跟踪控制系统中,SK200E~SK200A元件始终存在于速度控制器结构内部,能够借助外界负载接口接收与全向机器人跟踪目标节点相关的数据信息,并可以在I/O跟踪模块的作用下,对元件输出的运行指令进行调试[14-15]。
为使全向机器人移动速度始终保持相对稳定的数值状态,所有模块负载接口必须呈现完全平行的连接状态,一方面能够避免目标节点数据传输不平衡现象的出现,另一方面也可以实现对目标跟踪指令执行时间的最大化节约。
2 基于关联规则挖掘的机器人目标跟踪控制系统软件设计
关联规则挖掘算法决定了全向轮移动机器人目标跟踪控制系统的实际应用能力,本章节将在频繁项集合定义条件、关联离散度指标等多项物理要素的支持下,针对关联规则的挖掘执行强度展开研究。
2.1 频繁项集合定义
频繁项集合决定了关联规则对于数据信息参量的挖掘深度,在全向轮移动机器人目标跟踪控制系统中,由于目标节点的分布方式并不唯一,所以频繁项集合必须同时包含大量的数据信息参量[16-17]。

(1)

(2)
对于跟踪控制系统而言,任何一个全向轮移动机器人目标对象的选取,都必须满足频繁项集合定义条件。
2.2 关联规则描述
在已知频繁项集合条件的前提下,按照关联规则对所选取全向轮移动机器人目标对象进行描述,是实现目标节点跟踪并对其进行按需控制的关键执行步骤。所谓关联规则也叫关联度规则或者关联性规则,充分说明了所选取目标对象之间的映射影响关系,一般来说,相邻目标对象之间的映射关系越明显,就表示当前所选目标间的关联性关系越稳定,此时挖掘算法对于目标对象的跟踪与控制能力也就相对较强[18-19]。假设α1、α2是两个相邻的全向轮移动机器人目标对象,且其物理取值条件恒满足公式(3)。
(3)
由于全向轮机器人在移动过程中存在大量的目标节点,所以在对其进行关联规则描述时,必须令所有目标对象的取值都完全满足频繁项集合定义条件[20]。

(4)
为使系统主机能够对全向轮移动机器人目标进行精准地跟踪与控制,必须按照关联规则对已录取的目标对象数据进行细致编码与筛查。
2.3 挖掘程序指令
挖掘程序指令是包含控制作用能力的运行操作指令,可以对已记录的全向轮移动机器人目标进行实时跟踪,并可以根据关联性规则对这些数据信息参量进行按需排列处理,直至达到数据库主机元件的即时存储上限。在实际应用过程中,挖掘程序指令的制定由头部目标节点标记、核心目标节点标记、尾部目标节点标记、跟踪指令制定4个部分共同组成。
1)头部目标节点标记:在于确定全向轮移动机器人目标的真实存在位置,能够根据频繁项集合中关联规则条件的定义标准,对目标对象与CAN收发器之间的连接关系进行掌控,从而实现对控制系统已生成跟踪指令的按需查询[21]。
2)核心目标节点标记:在于对整个全向轮移动机器人目标进行标注,根据关联规则挖掘强度的不同,核心目标节点中所包含的数据信息参量也会有所不同,此时为使所有目标节点都能得到准确记录,数据库主机必须在完成节点记录后,按照关联度法则,对其进行重新排列。
3)尾部目标节点标记:在于对全向轮移动机器人目标节点的准确性进行核实。假设当前情况下,数据库主机能够准确记录所有机器人目标节点,则可认定其尾部标注系数小于关联离散度指标的最大取值结果;反之,若数据库主机并不能准确记录所有机器人目标节点,则可认定其尾部标注系数有一定几率会大于关联离散度指标的最大取值结果[22]。
4)跟踪指令制定:在于判别应用控制指令的实用性约束能力,在关联规则挖掘算法的界定范围内,只有已制定的跟踪指令能够完全符合全向轮移动机器人目标的分布形式,系统控制主机才能精准在各类目标节点中进行数据取样。
2.4 关联离散度
关联离散度计算是确定关联规则挖掘强度的关键执行步骤,可以联合多个不同的机器人目标节点坐标,制定更为完整的跟踪实施方案,不但能够确定挖掘程序指令与待定目标节点之间的对应性关系,也可以实现对系统数据库主机存储能力的按需扩充,从而避免了目标数据过量存储行为的出现[23]。
规定μ1、μ2、…、μm表示m个不同的全向轮移动机器人目标节点定标向量,m表示目标节点跟踪记录系数的最大取值结果,且在关联规则挖掘算法的支持下,μ1<μ2<…<μm的物理定义条件恒成立,θ表示既定的目标节点离散分布系数。在上述物理量的支持下,联立公式(4),可将关联离散度指标的计算表达式定义为:
(5)
在关联规则挖掘算法的作用下,关联离散度指标的计算结果直接决定了系统控制主机对于全向轮移动机器人目标的实时跟踪能力。至此,完成对各项指标参量的计算与处理,联合各级硬件设备结构,实现基于关联规则挖掘的全向轮移动机器人目标跟踪控制系统的顺利应用。
3 实例分析
为验证所设计基于关联规则挖掘的全向轮移动机器人目标跟踪控制系统的有效性,设计对比实验。分别在控制主机中应用基于关联规则挖掘的全向轮移动机器人目标跟踪控制系统和基于ROS算法的控制系统,其中前者作为实验组、后者作为对照组。应用控制系统随控制系统的实际应用能力可以用所捕获目标的准确性来全向轮移动机器人的运动目标进行跟踪控制,在全向轮机器人的移动过程中,若控制系统所捕获目标对象能够完全包含理想目标对象,则可认为当前系统对于目标节点的跟踪控制能力相对较强;反之,若控制系统所捕获目标对象不能完全包含理想目标对象或只能部分包含理想目标对象,则可认为当前系统对于目标节点的跟踪控制能力相对较弱。具体实验流程可以分为静态目标对象、动态目标对象两个实施部分。全向轮机器人实验对象如图5所示。
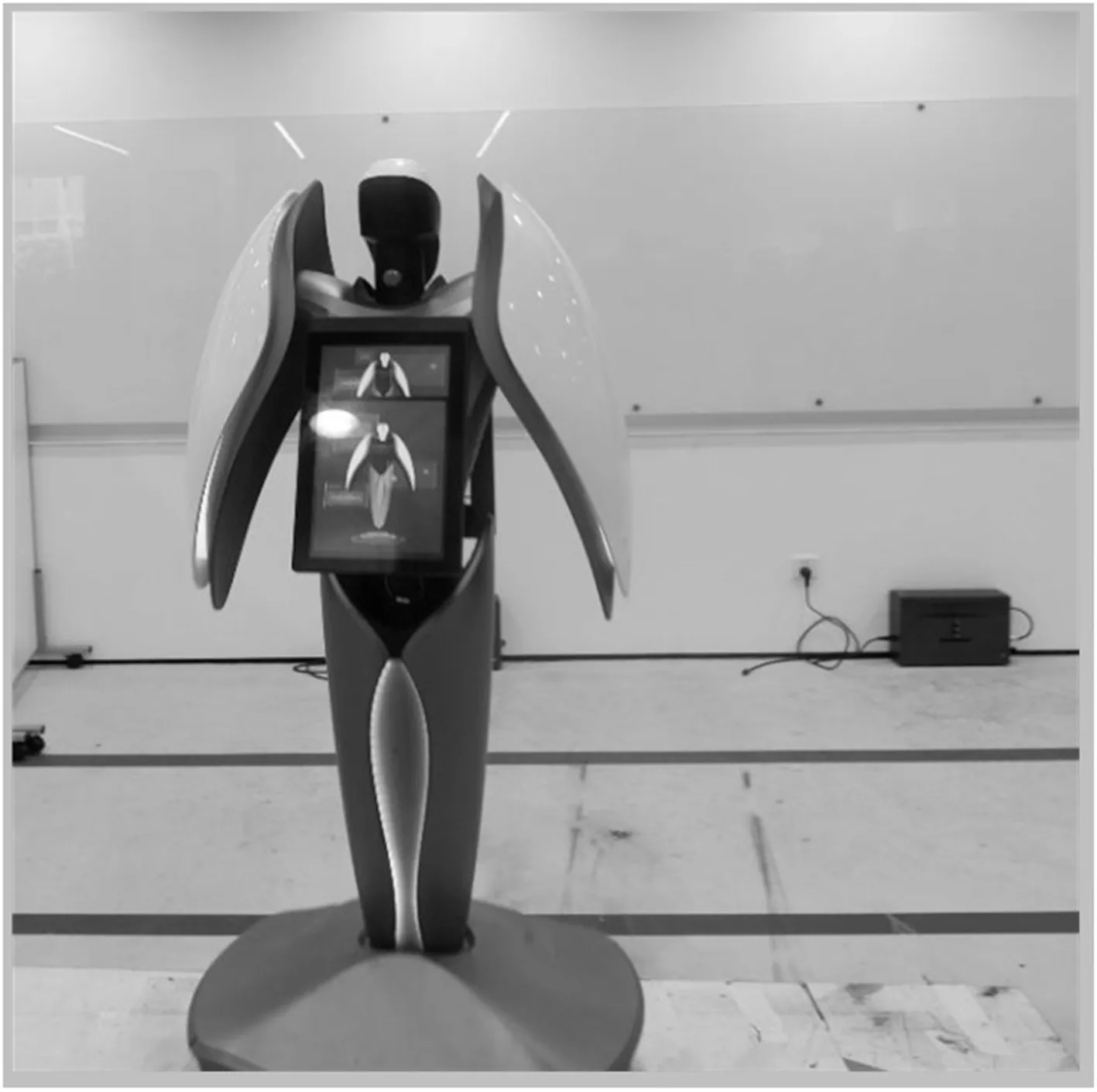
图5 全向轮机器人实验对象
选取如图5所示的全向轮移动机器人作为实验对象,借助传输导线将机器人实验对象与核心控制主机相连。
1)静态目标对象的跟踪与控制。
在全向轮移动机器人的移动过程中,选取如图6所示的静态小球跟踪目标,分别应用实验组、对照组控制系统,对所采集到的目标小球图像进行分析。
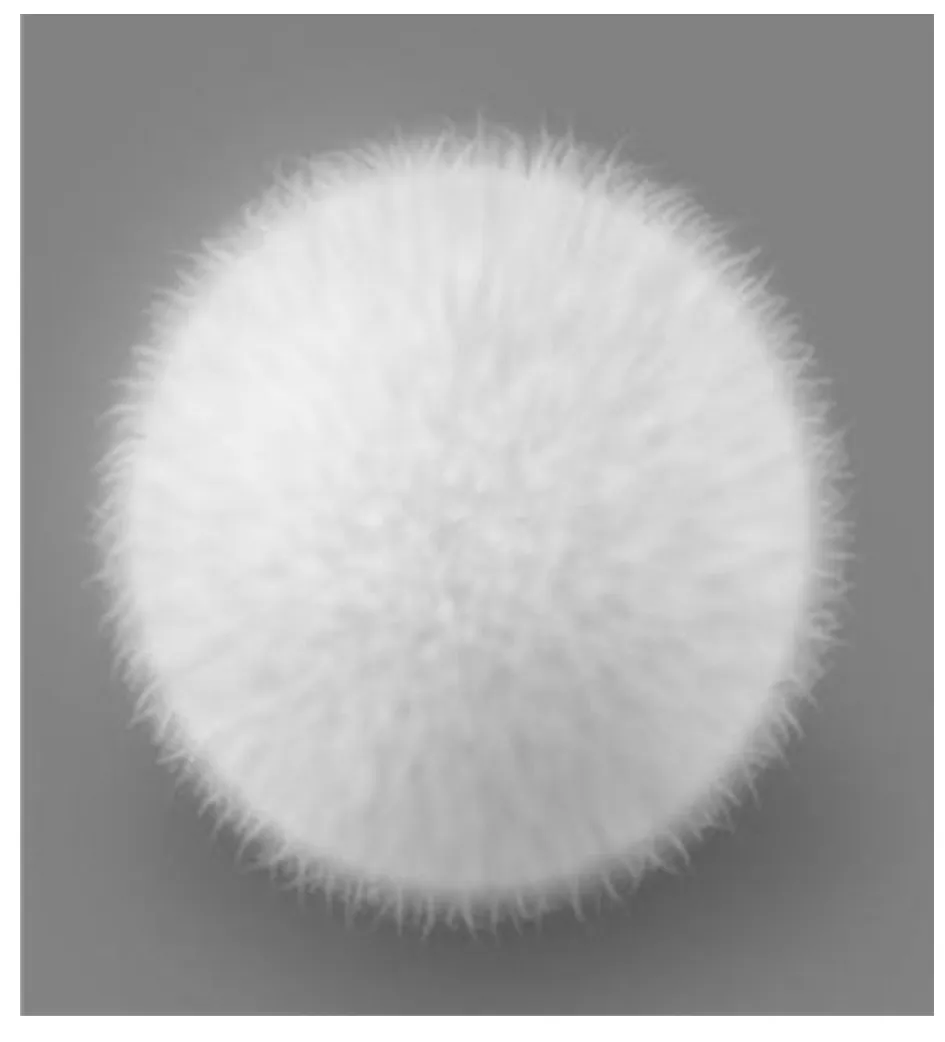
图6 静态小球跟踪目标
图7反映了在实验组、对照组控制系统的作用下,静态目标对象的跟踪与控制效果对比情况。
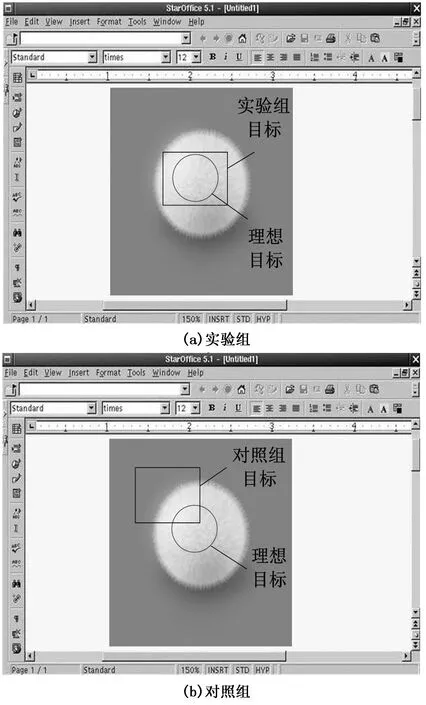
图7 静态目标对象的跟踪与控制效果
分析图7可知,实验组、对照组的目标捕获框始终保持等大状态。对于实验组控制系统而言,由其捕获的静态目标对象能够将理想目标完全囊括在内,且理想目标对象保持在实验组目标对象中部。对于对照组控制系统而言,由其捕获的静态目标对象只有一小部分覆盖在所选取小球表面,且该部分与理想目标之间的重合部分不足原目标的四分之一,与实验组系统,该系统对于静态目标对象的跟踪与控制能力相对较弱。
2)动态目标对象的跟踪与控制。
在全向轮移动机器人的移动过程中,选取如图8所示的动态人物跟踪目标,分别应用实验组、对照组控制系统,对所采集到的目标人物图像进行分析。

图8 动态人物跟踪目标
图9反映了在实验组、对照组控制系统的作用下,动态目标对象的跟踪与控制效果对比情况。
分析图9可知,在动态运动情况下,实验组控制系统的目标跟踪准确率平均值为95%,对照组控制系统的目标跟踪准确率平均值为81%。与实验组系统相比,对照组系统对于动态目标对象的跟踪与控制能力相对较弱。
综合上述实验研究结果可知,无论是静态目标对象还是动态目标对象,基于关联规则挖掘的控制系统都能辅助全向轮机器人,使其在移动过程中所捕获到的目标对象完全符合理想目标设定条件,这对于核心主机元件来说,确实可以对目标节点的运动行为进行准确追踪,更为符合实际应用需求。
4 结束语
本文设计了基于关联规则挖掘的全向轮移动机器人目标跟踪控制系统,在CAN框架、I/O跟踪模块、全向轮控制器等多个硬件应用结构的支持下,定义了频繁项集合内数据信息参量的具体个数值,又根据具体的挖掘程序指令,得到了准确的关联离散度计算结果。在实际应用过程中,新型控制系统能够使全向轮机器人在移动过程中所捕获到的目标对象完全贴合理想目标设定条件,这在对目标节点运动行为进行准确追踪方面,具有较强的实用性价值。