台风期船舶航行海区风险评估和避台规划
2022-08-02靳卫卫肖强罗教彬于波赵建平安伟
靳卫卫,肖强,罗教彬,于波,赵建平,安伟
(1.中海油能源发展股份有限公司安全环保分公司,天津 300452;2.中海油能源发展股份有限公司北京安全环保工程技术研究院,北京 102209;3.中海石油(中国)有限公司深圳分公司,广东 深圳 518067;4.中海石油(中国)有限公司上海分公司,上海 200032;5.中国海洋石油集团有限公司,北京 100011)
我国处于西太平洋台风多发地,每天都会遭受20余起台风影响,其中,南海海域生成台风,由于其地理位置特点,留给船舶避台应急反应时间短,造成台风期船舶无法及时撤离等风险。国内相关学者围绕船舶避台规划开展了一些相关研究,多以台风路径和风圈为基础数据,开展避台规划。随着台风预报模型和网络传输技术的发展,提供了更加精细化的台风预报数据,动态评估风险区划,开展动态路径规划技术研究,可以更大程度地降低台风期船舶航行风险。本文将以网格化的风、浪、流数据为基础,综合评估船舶航行海区的风险区划,以此建立底图,基于台风时间序列数据开展动态的路径规划和船舶避台动作,为台风期船舶避险提供更加可靠的保障。
1 数据网格化处理
海上船舶风险评估考虑的主要海洋环境要素有:风场、流场、海浪,通过网络业务化数据服务接口,每天定时获取2 次,每次获取未来7 天预报数据,数据时间间隔3 小时,使用Netcdf 数据格式压缩传输。
不用的海洋环境要素由不同机构的数值模式运行计算所得,因此,导致风、浪、流具有不同的空间分辨率,这里,使用的风场分辨率为1/12 度,海浪场分辨率为1/4 度,流场分辨率为1/24 度,不同网格分辨率的数据无法直接应用与区划网格风险评价。因此,这里根据应用需求,统一以1/12 度为准,使用反距离空间插值法(IDW)对海浪数据进行加密插值,得到1/12 度海浪网格数据;以隔行抽取的方法对流场数据进行抽稀,得到1/12 度流场网格数据。
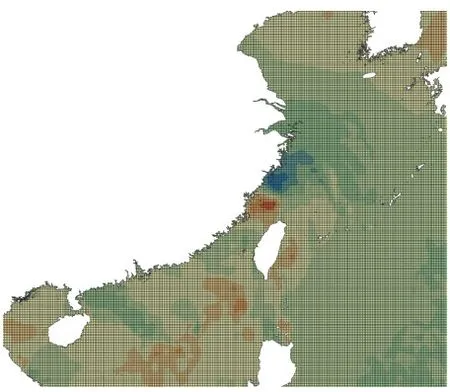
图1 海洋环境网格化数据示意图
2 海区风险区划
根据ALARP(As Low As Reasonably Practicable)原则,由不可容忍线和可忽略线将海洋工程作业船舶在风浪条件下的风险划分为分:风险严重区、风险可容忍区和风险可接受区,分别对应高、中、低不同的风险等级。
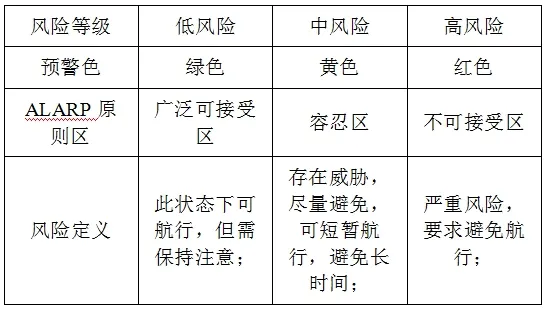
表1 基于ALARP 的海上船舶风险等级划分表
台风期海上船舶风险评价属于模糊集合概念,不具备确定性,应用模糊系统的原理,从多个因素对被评判事物的隶属度等级状况进行综合评判。因此,这里采用模糊综合评价法进行海洋环境区划风险评价。
对于不同的船舶类型,应根据其船舶尺寸、吨位、载重、船龄、航速、货物类型等自身影响因素,建立模糊综合评价体系和模型。
2.1 建立评价因素集
针对不同船舶,根据关注的风力、浪高、流速等海洋环境要素因素的不同恶劣程度,建立评价指标集,用U 表示。
U = (u,u,...,u)
其中,元素 ui 代表影响评价对象的第i 个因素。
2.2 建立评价集
根据ALARP 原则,将海上船舶风险划分为高、中、低三级,用V 表示。
V = (v,v,...,v)
其中,元素 v代表第j 种评价结果。
2.3 构建评价矩阵
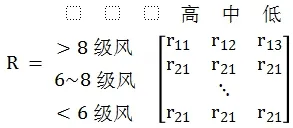
因素集U 中第i 个元素对评价集V 中第1 个元素的隶属度为r则对第i 个元素因素评价的结果用模糊集合表示为:
R= (r,r,...,r)
则,m 个单因素评价集为行组成矩阵Rm*n 称为模糊综合评价矩阵。
2.4 确定因素权重
各因素的重要程度有所不同,为此,给各因素ui一个权重ai,各因素的权重集合的模糊集,权重系数可以通过层次分析法AHP的成对比较阵来构造,用A表示:
A = (a,a,...,a)
2.5 建立综合评价模型
确定单因素评判矩阵R 和因素权向量A 之后,通过模糊变化将U上的模糊向量A变为V上的模糊向量B,即:

根据上面建立的海上船舶环境风险等级模糊综合评价模型,对每个网格内的风、浪、流进行综合评价,计算其风险等级,即可得到整个关注海区的整体风险区划,为下一步避台路径规划提供基础数据。
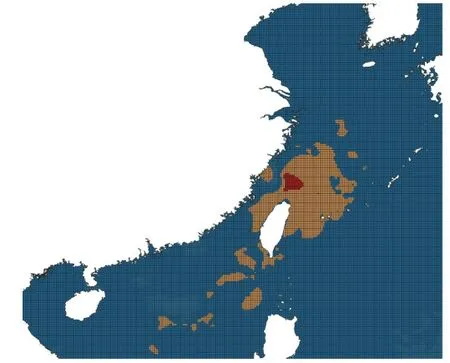
图2 基于海洋环境数据的风险区动态划分示意图
3 避台规划
根据风险程度区划评估结果,各个网格赋予不同的权重系数,高、中、低不同的风险对应着不同的数值系数,作为路径规划中不同路径经过当前网格的代价系数。经过中风险区网格的路径虽然比低风险区近,但整体路径上的代价系数较大,将不利整体路径,以此动态规避风险。
海上船舶避台航行中,由于台风预报的精度和不确定性,需要保持与台风保持一定的安全距离,用于保证突发情况下,船舶有充足的时间做出调整避开风险,将此安全距离称为安全“瞭望”距离。“瞭望”距离这里设定为船舶与高风险区边缘的最短距离,根据不同的海况情况可以设置不用的“瞭望”距离,通常以船舶航速和应急反应时间计算所得,这里以5 小时应急反应时间为例,则安全“瞭望”距离约为100 公里左右。
基于海上风险程度区划建立船舶路线规划网格底图,网格赋予不同的代价系数,结合“瞭望”距离反向考虑,通过膨胀扩大不同风险区的网格范围,来使船舶与实际风险区保持一定的安全距离。在此基础上引入经典的路径规划D-star lite 算法,根据时间序列不同时刻的台风强度场预报,实时计算风险评估和建立路径底图,开展动态多阶段路径规划,计算不同的避台优化路径,根据预测路径开展减速、改向、抛锚等不同的船舶避台操作。
4 结论
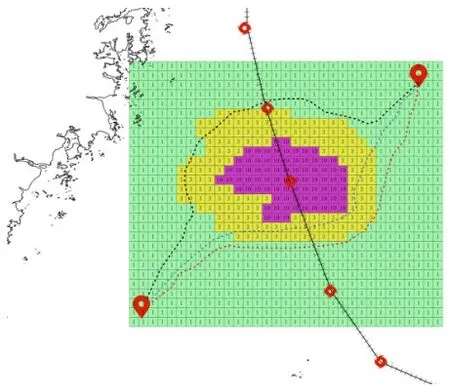
图3 台风过程某时刻船舶航行避台路径规划示意图
基于台风强度预报的网格化数据,可以实时地开展局部海区的船舶航行风险区划评估,结合安全“瞭望”距离建立船舶避台路径规划风险底图,结合路径规划算法,动态开展多阶段避台路径规划,以此为据开展有效的船舶避台动作。相比较与基于路径和风圈的避台路径规划技术,本文提出的基于台风网格强度和动态路径规划,可以提供更加安全和有效的船舶台风期航行避台优化方案。
