旋转基线相位干涉仪测向精度提高方法*
2022-08-01焦义文高泽夫
李 冬,焦义文,高泽夫
(航天工程大学 电子与光学工程系,北京 101416)
0 引 言
相位干涉仪通过比较若干个不同位置上阵元所接收的辐射源信号相位的大小来判断信号的入射方向,得到辐射源的位置信息,具有很高的测向精度,是目前单站无源定位技术常用的测向方法之一。常见的相位干涉仪按天线阵摆放形式主要分为一维、二维和三维干涉仪。
在传统干涉仪测向方法的基础上,王国林等[1]提出了一种冗余虚拟基线的方法,提高了解模糊正确概率。张敏等[2]提出了一种多假设伪线性迭代最小二乘测向方法,通过模糊的相位差得到多组测向初值,采用线性最小二乘方法进行迭代计算,通过检测最小相位误差确定来波方向。余忱等[3]提出的非固定比例基线法,相位容差适应能力较强,在实际运用中易于实现。居易等[4]基于参差基线解模糊算法原理,利用最长基线鉴相精度,提出了一种解模糊的改进算法,其具有计算量较小、适合实时计算以及正确概率较高的优点,适合工程应用。杨伟程等[5]介绍了二维相位干涉仪的定位数学模型,详细地分析了干涉仪平台稳定性、基线长度变化、波长估计误差及系统噪声与相位偏差等测向定位误差因素,提出了误差改善途径。司伟建等[6]提出了一种旋转基线解模糊方法,通过一条基线两端的天线绕基线中心点旋转和相位积分实现解模糊,只使用了两个阵元,具有占用资源少、测向算法简单等优点。但旋转基线法测向时利用相位值的最大和最小值这两个数据求来波角度,在存在噪扰的情况下只采用两个数据解算角度,误差较大且数据利用率较低,因此需要对解模糊后的数据进行拟合处理,得到平滑的余弦曲线,增大测向精度。
在工程实践中,常常会遇到根据一些离散的采样数据进行曲线拟合的问题,且得到的拟合函数应该具有光滑性和精确性。目前常用的曲线拟合方法有拉格朗日插值拟合算法、分段三次埃米尔特拟合法、三次样条曲线法、多项式拟合法和最小二乘法,其中最小二乘法原理简单,拟合效果好,精度高。梁志国等[7]介绍了一种已知信号频率的三参数余弦拟合算法,利用最小二乘法估计出除频率外的三个参量,最终通过拟合求得余弦波的表达式。
本文在利用旋转基线法求得阵元间无模糊相位差之后,采用三参数最小二乘法对解模糊后的相位差曲线进行幅度、初相和偏移量的估计,进而拟合出平滑的相位差曲线,以降低环境噪声对测向系统的干扰,提高测向准确度;且进行余弦曲线参数估计时使用了全部的测量数据,拟合后的相位曲线增大了相位信息的利用度,测向精度更高。
1 相位干涉仪测向原理
1.1 单基线干涉仪测向原理
图1为一维单基线相位干涉仪测向原理图,阵元间的连线称为基线,单基线干涉仪即由两个阵元构成的只有一条基线的干涉仪系统。

图1 单基线干涉仪测向原理图
假设信号到达接收天线前的阵前波为平行波,则两天线接收到的信号相位差φ为
(1)
式中:f为入射信号频率,λ为信号波长,θ为入射信号的俯仰角,c为光速,D为基线长度。则对应的俯仰角为
(2)
在相位干涉仪测向方法中,由于鉴相器物理原理限制,其提取的信号相位差只能在[-π,π]范围内[8]。对于由两个天线构成的一维单基线,当基线长度小于入射信号二分之一波长时,对于任意方向入射信号,实际相位差都在[-π,π]以内,测量值反映实际值;当基线长度大于入射信号二分之一波长时,相位差实际值在[-π,π]以外,此时鉴相器输出值对实际相位差进行截断和平移,使其在[-π,π]范围内翻折,这就是相位干涉仪测向方法中常见的相位模糊问题。因此单基线相位干涉仪不适用于高频信号测向系统,需要采用多基线或者旋转基线进行解模糊,提高正确解角的概率。
1.2 旋转基线干涉仪测向原理
一维单基线相位干涉仪只能测来波俯仰角,不能得到二维角度信息。旋转基线相位干涉仪利用基线两端的接收阵元围绕基线中心点的旋转,使阵元间真实相位差变化规律满足余弦曲线形式,通过判断余弦曲线极值求出来波角度,达到同时测方位角和俯仰角的目的。
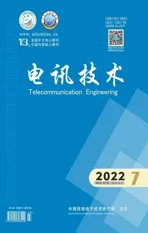
建立如图2所示的天线旋转模型,两个接收天线S1、S2在一条直线上,基线长度为D,以基线中心为原点绕z轴进行逆时针旋转,旋转平面定义为xoy平面,旋转角速度为ω,基线初始位置与x轴重合。目标T的坐标为T(r,φ,θ),相对接收基线而言为远场,入射信号方位角为φ∈[0,2π),表示从x轴正方向按逆时针方向旋转的角度;俯仰角为θ∈[0,π/2),表示入射波和xoy平面的夹角。
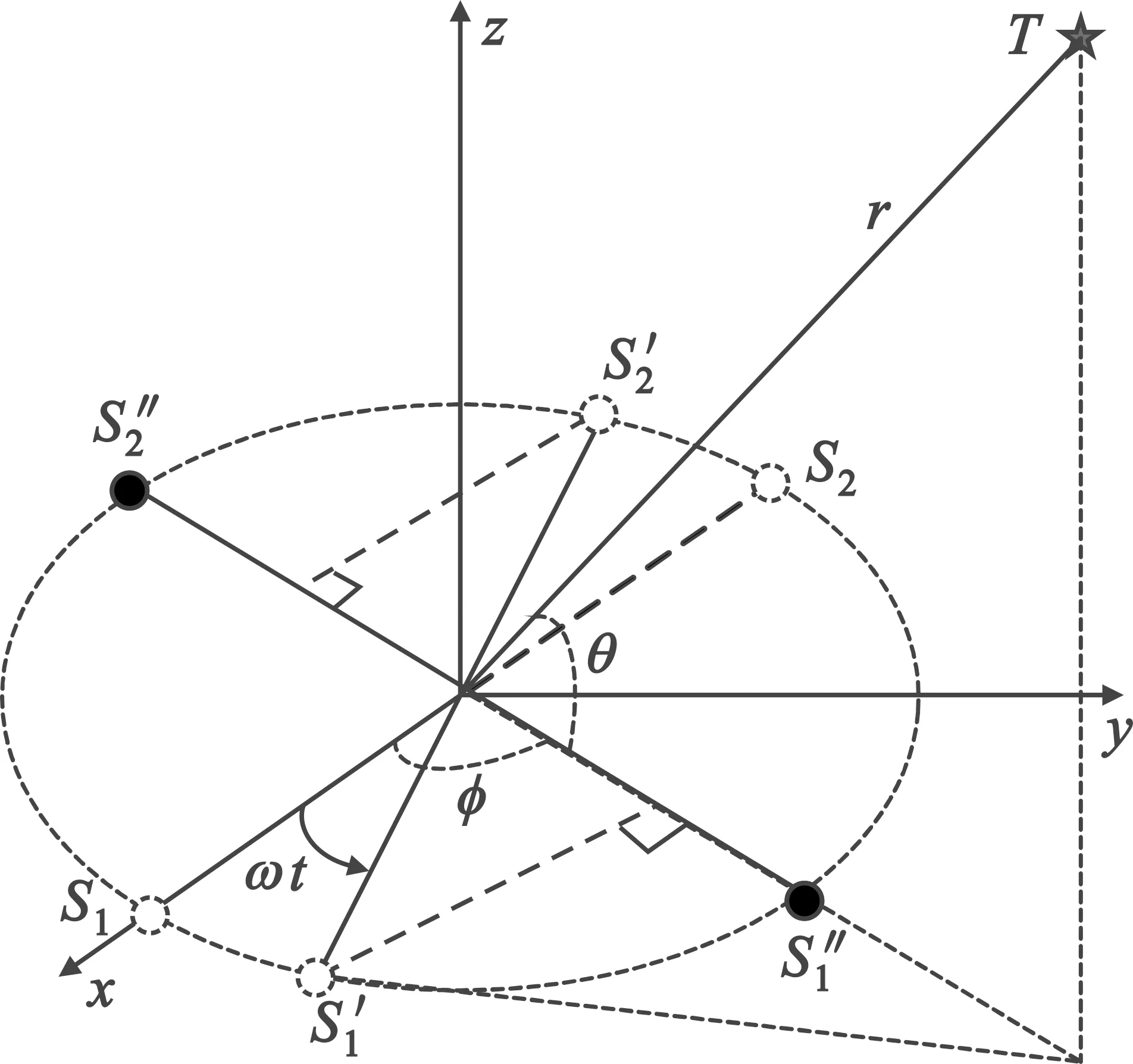
图2 旋转基线干涉仪测向模型
在旋转基线相位干涉仪测向系统测向过程中,基线有效长度随着基线的旋转变化,此时,两天线接收的真实信号相位差不再是一个固定值,而是满足下式所表达的余弦规律[9]:
(3)
由于鉴相器输出的相位差将实际相位差限定在[-π,π]范围内,因此其输出相当于把φ(t)在主值区间进行连续不断的翻折,鉴相值如图3所示,可知存在相位模糊。

图3 鉴相相位差曲线
针对相位模糊现象,若想恢复出真实的相位差曲线,需要进行解模糊处理。解模糊即是消除多值,消除相位跳变现象[10]。旋转单基线可以利用数字积分器进行相位的累加处理以达到解模糊的作用,数字积分器的原理如式(4)所示。根据鉴相器输出的相位差,按式(4)进行累加计算,可以还原出无模糊的真实相位差。
(4)
式中:φi是鉴相器当前时刻的相位差,φi-1是上一次的相位差,φ(i)是积分器当前累加的相位差,φ(i-1)是积分器上一次的相位差[11]。通过数字积分器后得到的真实相位差变化曲线如图4所示,由积分后的相位值曲线可看出,旋转基线法可以消除相位跳变现象,恢复出完整的相位差变化曲线。
由公式(3)可知,当θ固定即目标俯仰角不变时,测量相位差一个周期最大值处对应的旋转角度即为目标方位角,即基线旋转角度为φ时测量相位差有最大值,基线旋转角度为φ+π时测量相位差有最小值,由此可以得到俯仰角和相位差的关系式。
(5)
因此,通过判断曲线的极大值φmax和极小值φmin点就可以确定θ的值。则目标俯仰角为
(6)
得到目标的方位角为
φ=ωt|φ=φmax=π+ωt|φ=φmin。
(7)
由上述分析可知,旋转基线法可以同时测量方位角和俯仰角,且不会产生俯仰角的模糊。
2 三参数最小二乘估计算法
理论上,鉴相相位差经过解模糊处理后能够得到无模糊的相位差数据,但在存在噪声的真实环境下进行测向时相位差往往存在误差。因此需要对解模糊后的相位差曲线进行拟合处理,以降低系统误差,并且拟合可以利用全部相位点信息,提高测角精度。本文采用三参数最小二乘法对解模糊后的相位差曲线进行拟合。该算法通过最小二乘法估计出余弦曲线的幅度、初相、偏移量三个参数,进而拟合得到误差较小的光滑曲线[12]。
设基线旋转角频率为ω,理想余弦信号为
y(t)=Acos(ωt)+Bsin(ωt)+D。
(8)
yi(i=1,2,…,n)为时刻ti处的无模糊相位差值,拟合过程即为选取或寻找A、B、D,使公式(9)所述残差平方和最小:
(9)
为了找到合适的A、B和D值,首先构造下列矩阵:
(10)
(11)

(12)
则式(9)可以用矩阵方式表示如下:
ε=(y-ψx)T(y-ψx) 。
(13)
式中:(·)T表示(·)的转置。当式(13)最小时可以得出x的最小二乘解
(14)
拟合函数为
(15)
将其转换为幅度和相位表达式:
微纳测头支撑机构的主要参数如图3所示,l、wb、tb分别为支撑梁长度、宽度和厚度,ls为测杆长度,wi为中心体半径。其中:Z向为轴向,Y向为横向。
(16)
式中:
(17)
(18)
拟合残差ri如下:
ri=yi-Acos(ωti)-Bsin(ωti)-D。
(19)
拟合残差有效值如下:
(20)
3 仿真验证与分析
本文主要分析在不同带内功率信噪比条件下相位拟合后的测向精度(拟合前后已通过系统标校降低了鉴相器自身的误差对测向精度的影响),带内功率信噪比即信号带宽与噪声带宽相等情况下的信号功率与噪声功率之比。选取基线长度为1 m的单基线相位干涉仪,采用旋转基线法对S频段信号进行测向,基线转速60 r/min,来波方位角为90°,俯仰角为50°。先提取阵元间来波信号相位差,再对鉴相相位差进行解模糊处理,最后对解模糊后的相位差分别进行多项式拟合和最小二乘拟合。
将多项式拟合与本文所提最小二乘法拟合进行对比。图5是带内功率信噪比为25 dB时拟合前、多项式拟合后及最小二乘法拟合后的相位差变化曲线对比图,由仿真结果可知,在环境中存在较大干扰时,拟合前的相位差曲线波动较大,测角精度较低,拟合后的相位差曲线误差较小,精度更高。

图5 信噪比为25 dB时拟合前及两种方法拟合后相位差变化曲线
基线长度为1 m,转速60 r/min,对来波角度不同的S频段信号进行测向,带内功率信噪比为25 dB。将信号相位差拟合前与两种方法分别拟合后求得的方位角、俯仰角进行对比分析,结果如表1所示。

表1 拟合前与两种方法拟合后不同来波角度
由表1可知,拟合后的角度偏差远小于拟合前,且最小二乘法性能优于多项式拟合。
下面采用蒙特卡洛仿真实验对提取的相位差进行两种方法拟合前后的测向性能分析。带内功率信噪比为-5~35 dB,其余参数与图5实验相同。在不同带内功率信噪比下分别进行1 000次蒙特卡洛实验,得到不同信噪比下拟合前和两种方法拟合后测量相位差均方误差。
图6为测向均方误差与带内功率信噪比关系图。为了能够更加直观地显示拟合前后测量相位差均方误差关系,我们利用了semilogy函数,使用y轴的以10为基数的对数刻度和x轴的线性刻度绘制了均方误差与信噪比关系,如图6中小图所示。可以看出,拟合前,带内功率信噪比大于15 dB时,系统测向性能稳定;信噪比小于15 dB时,系统测向性能迅速降低,且当环境中噪声干扰足够大时,测向系统无法进行测向;而拟合后无论环境中是否存在强噪声干扰,相位干涉仪测向性能始终保持稳定,且最小二乘法拟合比多项式法拟合性能更优,精度更高。

图6 测向均方误差与信噪比关系图
采用最小二乘法对解模糊后数据进行拟合虽然能够提高测向精度,但在实际工程应用中,当信噪比较低时最小二乘法拟合残差有效值较大,如图7所示;图8所示为信噪比15 dB时信号相位差最小二乘法拟合残差。

图7 不同信噪比下最小二乘法拟合残差有效值
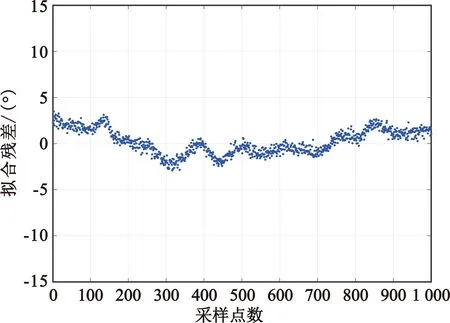
图8 15 dB时最小二乘法拟合残差
不同信噪比下最小二乘法拟合残差有效值和测向均方误差对比结果如表2所示。
表2 不同信噪比下拟合残差有效值和测向均方误差
由表2可知测向均方误差随信噪比增大始终小于拟合残差有效值,符合第2节理论分析的结果。
4 结束语
针对旋转基线法在低信噪比时测量相位差误差较大、传统拟合方法计算量大且复杂的情况,本文采用三参数最小二乘估计法对相位差曲线参数估计后进行正弦曲线拟合,得到均方误差较小的相位差曲线,实现了在信噪比较低时高精度测向的目的。但目前本方法仅适用于单目标情况下测向,在多目标情况下需要对算法进一步改进。