乌江渡水电站多波束联合水下机器人无损检测分析
2022-07-28华朝锋
华朝锋
(贵州乌江水电开发有限责任公司乌江渡发电厂,贵州 遵义 563002)
1 联合无损检测原理
安全专项检查(分析)是发现和探明水电站水下结构缺陷和隐患的重要技术手段,可为水工构建物安全性态评价和缺陷修复提供翔实的数据资料。鉴于水下环境的复杂性、检测区域的特殊性和影响因素的动态性,传统水下检测主要采用蛙人定期局部进行检查[1-3]。受下潜时间、深度和潜水设备装置等因素制约,该方法无法准确、全面获得待测区域的量化指标,且潜水员的生命还面临巨大威胁。多波束测深技术利用发射换能器阵列,多波束测深可获得一个条带覆盖区内多个测量点的水下深度值,以提取得到水下待测对象的高精度地形数据,经计算可对缺陷部位进行准确定量分析,但缺少对缺陷直观定性的判断依据[4-6]。水下机器人搭载高像素摄像机,可在水下连续、全方位和360°无死角对待测区域进行拍照与录像,实现对水下缺陷的定性判断,但缺少对缺陷尺寸、大小的定量评价数据[7-8]。将多波束测深技术联合水下机器人应用到乌江渡水电站新建机组尾水池无损检测中,通过定性化图像和定量化数据全面了解和系统评估水下情况,为电站科学制定发电运行计划和缺陷修复提供翔实基础数据。
1.1 多波束探测定量分析
多波束探测系统是用发射换能器阵列向水底发射声波,接收换能器接收水底返回的声波信息,经数据处理后获得沿航线方向一定范围水下待测目标的大小、形状和高低等数值。多波束测深系统采用惯导系统并配置GNSS辅助定位,可精准获取水下地形的三维模型[9],并绘制翔实等深线图和典型测线地貌图,可为水电站水工建筑物运行性态专项检查和运行隐患排除及处理提供翔实的数据支撑。多波束探测系统工作原理见图1。
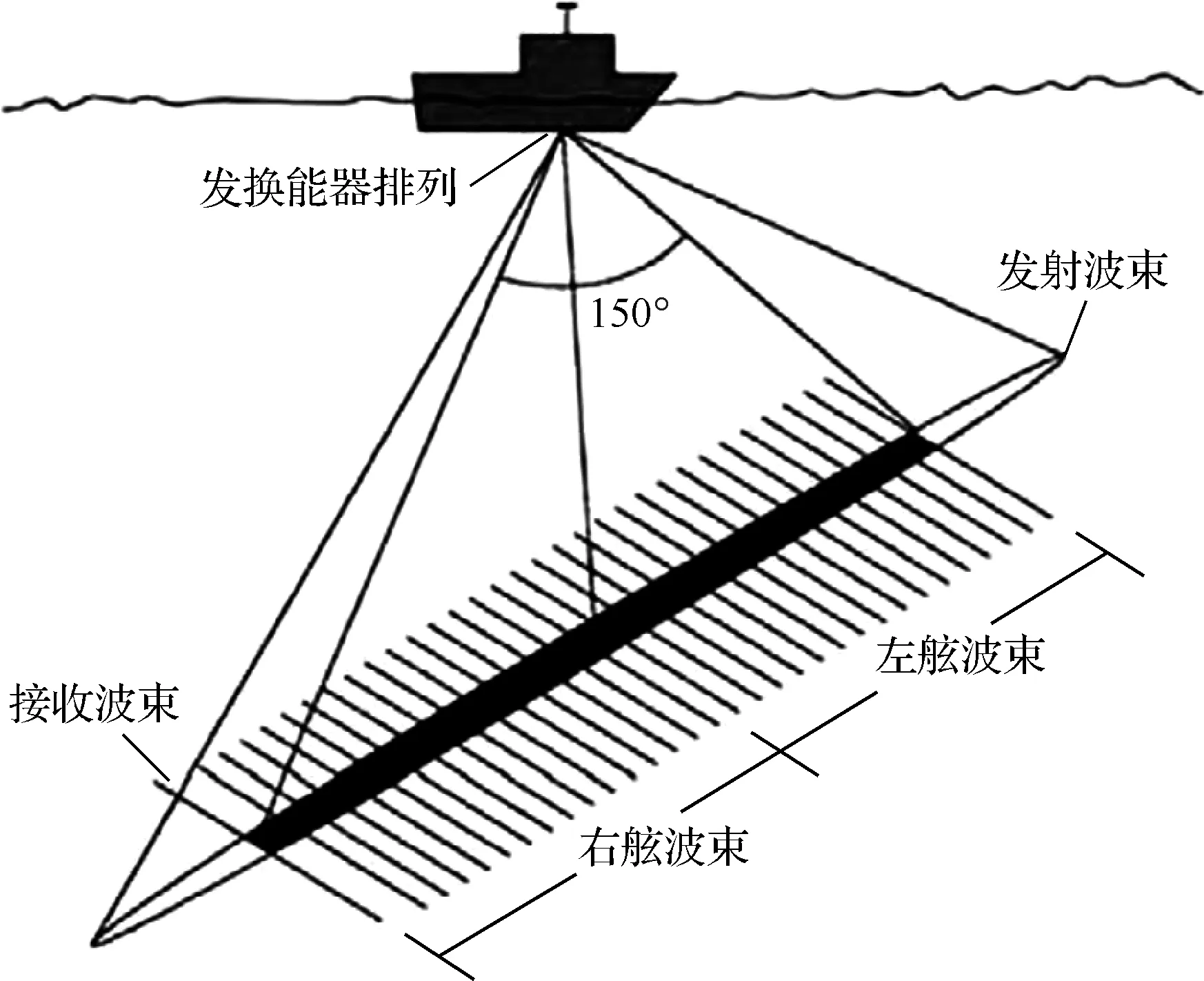
图1 多波束探测系统工作原理
乌江渡水电站新建机组尾水池无损检测项目中,运用多波束测深技术结合GPS-RTK技术与惯性导航系统进行定位,开展水下地形测量工作。采用华星A12 GNSS RTK系统进行检测辅助定位[10-11];安装Sonic 2024型宽带超高分辨率多波束测深仪和采用水下无人潜航器搭载水下高清彩色摄像设备进行水下高质量扫测作业。
1.2 水下机器人定性判断
水下机器人是搭载有高清摄像头由水面控制的水下作业系统,主要由控制主机、地面绞盘及控制管理系统、信号线缆、水下潜器、水声定位系统和辅助成像三维声呐等功能单元组成[12]。水下机器人探测系统作业见图2。
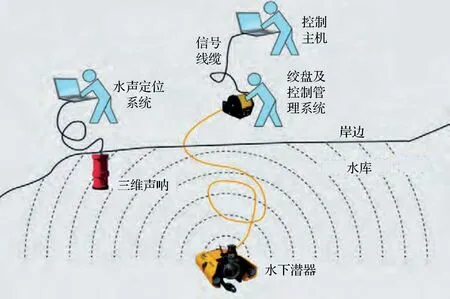
图2 水下机器人探测系统作业示意图
2 联合无损检测工程应用
乌江渡水电站新建机组尾水池无损检测项目中,采用海豚Ⅱ型机器人,通过搭载水下摄像系统、Teledyne Blueview BV5000水声三维扫描设备和M900避碰声呐等装备进行高质量扫测作业,通过拍摄大量的图像资料来准确、直观地发现异常区域,实现对缺陷的定性判断。
2.1 工程概况
乌江渡水电站位于贵州省遵义市境内,原始装机630MW,经扩机、增容改造后装机1250MW,是我国在喀斯特地貌石灰岩地区兴建的第一座大型水电站。工程于1970年开工,1983年底竣工投运发电。挡水建筑物为混凝土重力拱坝,坝高165m,坝顶长395m。坝址处河谷呈“V”形,坝基地层为下三叠统玉龙山石灰岩(T1),总厚度233m,石灰岩地下喀斯特高度发育,岩体完整性差。“乌江渡水电站大坝安全第五次定期检查、专项检查(分析)项目及要求”中提出:采用设备对新机组尾水池进行地形测量,并绘制水下地形图和典型测线地貌图,同时结合水下机器人拍摄图像资料对水工构建物性态进行分析。
2.2 水下检测实施
采用冲锋舟作为水下地形测量多波束探深系统的载体,在预设位置安装好水下发射、接收换能器、RTK流动站等仪器设备,并完成仪器设备的紧固和初始参数设置、校调。采用网络RTK技术提供定位参数,项目实测坐标系为WGS-84坐标系,高斯3°带投影,测区中央子午线为105°。工作现场使用网络RTK对各基点进行了测量,作为水下地形检测工作的坐标框架。采用PDS2000软件完成水下地形实测数据采集,并结合CARIS HIPS and SIPS软件完成实测数据的姿态校正、测线实测数据合并等处理,最终获得翔实的水下地形和冲坑位置、深度、高程等数据信息,并绘制地形等深线图和典型测线地貌图。
3 水下检测成果分析
3.1 水下地形多波束探测
乌江渡水电站新机组尾水池检测项目,采用多波束探测系统与水下无人潜航器联合进行水下探查。首先采用多波束探测系统进行水下全覆盖检测,了解乌江渡发电厂新机组尾水池池底及边墙现存状态;然后基于多波束检测成果,针对局部隐患或缺陷部位,采用水下无人潜航器完成重点区域情况的探查。新机组尾水池三维点云探测成果见图3。

图3 新机组尾水池三维点云
对检测范围内尾水池底板沿水流方向剖切3个剖面进行典型测线地貌分析,剖面间隔为12m。剖切面位置及起始桩号见表1和图4。
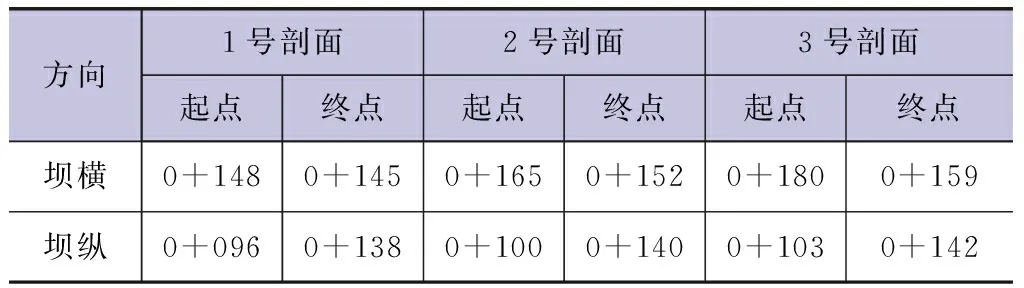
表1 剖切面起始桩号数据
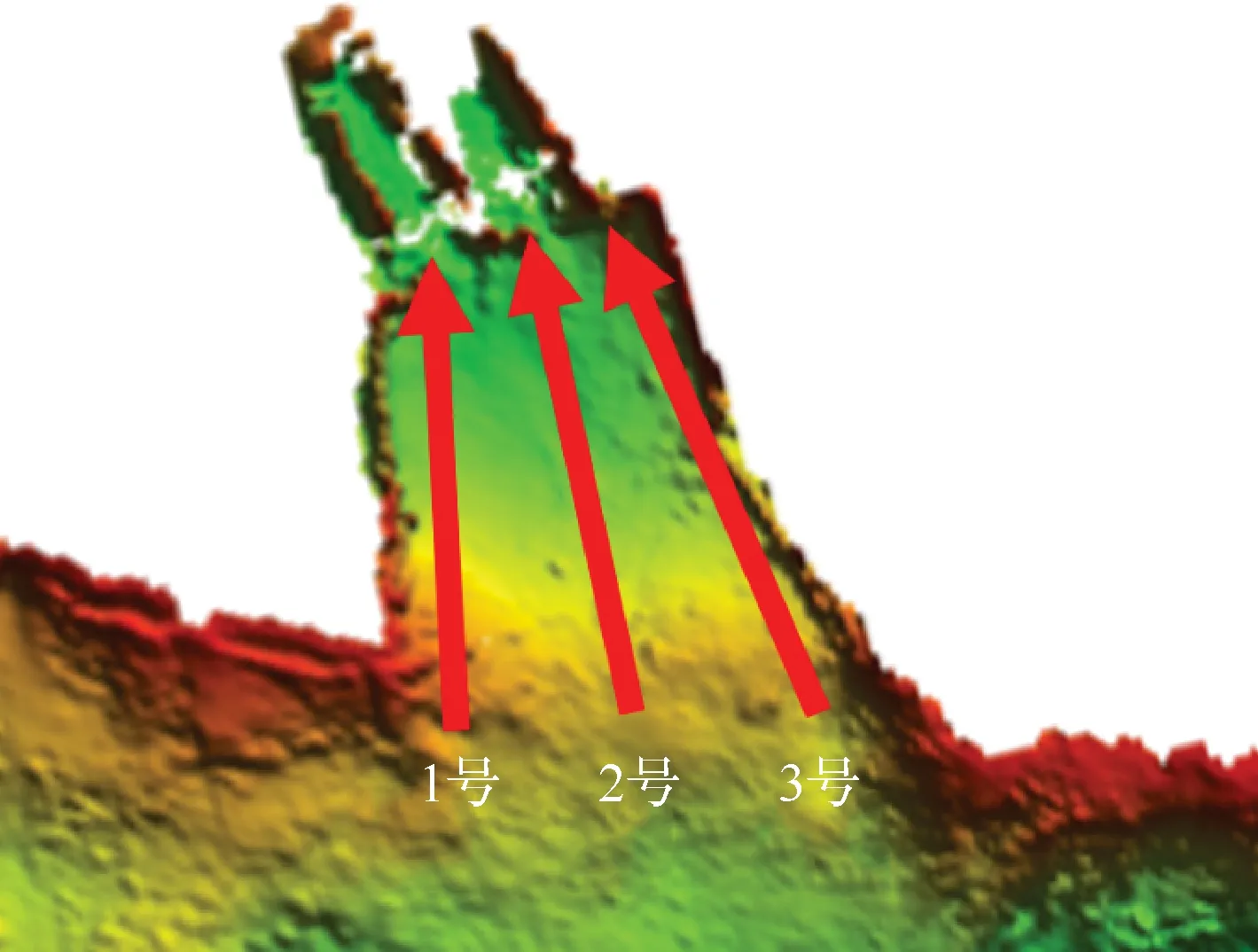
图4 尾水池剖面布置
软件分析得到的新机组尾水池底板典型测线地貌见图5~图7。
从图3和图5~图7可知,从机组出水口至河道,尾水池底板高程总体上逐渐增加,底板最低点位于机组出水口附近,高程约611.37m;存在2处疑似淤积,需结合水下机器人进行准确定性判断。

图5 尾水池底板1号剖面

图6 尾水池底板2号剖面

图7 尾水池底板3号剖面
3.2 水下机器人定性判断
3.2.1 底板淤积
从图3可知,机组出水口与左边墙及右边墙连接处存在2处疑似淤积。为探测尾水池淤积情况,采用水下机器人进行重点探查,成果见图8。

图8 尾水池淤积图形
从图8可知,新机组尾水池底部存在局部淤积,淤积①比淤积②更明显,淤积①处存在混凝土块状物体,但淤积整体程度较轻,基本不会对发电尾水造成影响。
3.2.2 左右边墙结构性态
通过分析多波束检测结果,未发现左右边墙有明显的破损、漏筋等结构异常;机器人水下探查左右边墙水下摄像成果见图9和图10。
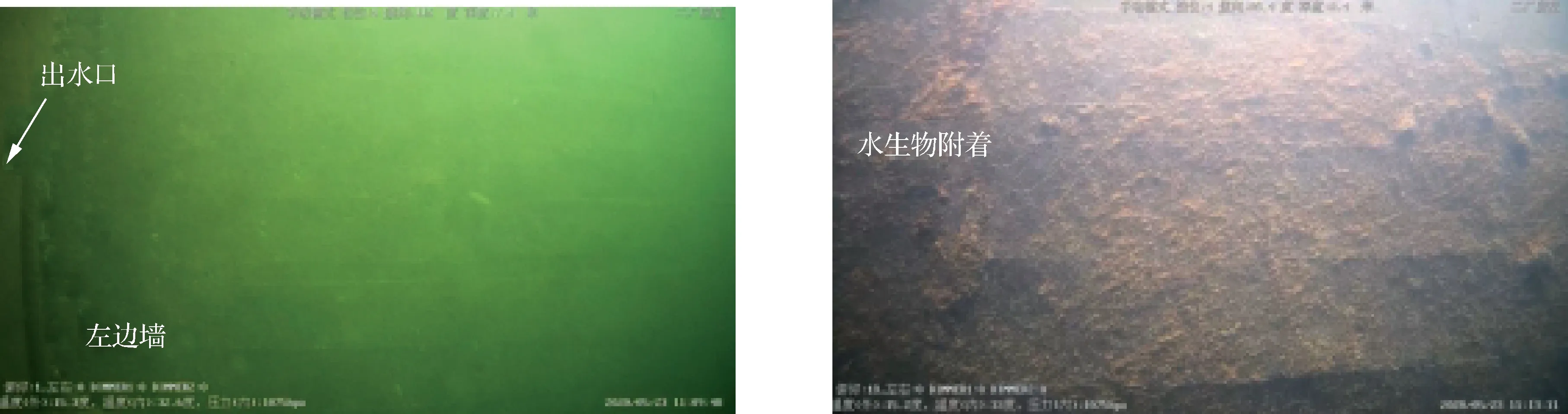

图10 右边墙水下摄像成果
从图9和图10可知,左右边墙结构完整,混凝土表明无明显的缺损、裂缝异常;水面附近墙体表面附着有水生物;墙体表面存在少量的麻面现象,并有少量混凝土结瘤附着在墙体表面;左边墙底板局部淘蚀,石头外露;右边墙底板存在淤积。综上所述,新机组尾水池左右边墙局部存在水生物附着、墙面麻面结瘤、底板淘蚀或淤积等问题,但隐患整体程度较轻,基本不会对水工结构造成影响。
4 结 语
多波束探测技术具有测量精度高、可视覆盖范围广、定位准确等优点,在较复杂水下地形测量、水下建筑物无损检测等领域具有良好的应用效果。将多波束探测技术和水下机器人引入到乌江渡水电站新建机组尾水池中,实施联合无损检测,有效采集到发电尾水池影响范围内河床、左右边墙的现状地形点云数据,经软件分析获得典型测线地貌图。并结合水下机器人拍摄图像资料,对底板淤积、左右边墙结构性状进行了定性分析,可为电站后期发电运行策略制定和安全隐患排除提供翔实资料依据。多波束探测技术结合水下机器人,能全面清晰绘制水下地形,并对冲刷区域淘蚀范围及水工结构性态进行准确定性和定量判断,可为类似水下隐蔽工程全面精确安全检测提供可靠技术支持。
