基于零陷展宽的空域海杂波抑制算法*
2022-07-28东松林岳显昌吴雄斌易先洲
东松林,岳显昌,吴雄斌,易先洲
(武汉大学 电子信息学院,湖北 武汉 430072)
0 引言
高频地波雷达(high frequency surface wave radar, HFSWR)作为一种重要的海洋遥感设备已实现近海实时、精细化观测等功能,既可探测风[1]、浪[2]、流[3]等海洋动力学参数,又能探测舰船、低空飞机等目标[4].
当雷达信号发射到海洋后,会引起特定波长的海浪与电磁波发生谐振作用,从而对目标探测产生严重干扰,这些干扰称为海杂波.探测海洋时,HFSWR接收到的海洋反射波具有较高的信噪比,一阶海杂波的强度一般会比目标信号强[5].由于海洋面积很大,海流一直不停地无规则运动,海杂波会有一定程度的展宽,这也会淹没许多目标,因此海杂波抑制问题已经成为雷达目标检测领域的重要研究方向[6].
国内外抑制海杂波主要有对消、子空间分解、神经网络抑制和斜投影(oblique projection, OP)[7]等算法.关于海杂波的对消方法主要有时域和模型对消法等,基于时域的对消方法比如自适应动目标显示[8]法,通过估计并补偿海杂波功率谱,对消处理后可抑制海杂波,但可能导致低速运动的目标被滤除,造成漏警.模型对消法[9]通过建立背景模型来抑制海杂波,此方法对于模型与海杂波吻合程度要求较高,如模型吻合度不高则效果不明显.子空间分解法主要有空域和时域的奇异值分解(singular value decomposition, SVD)[10]法等,分解法[11]是根据子空间的正交性原理实现海杂波抑制.空域SVD主要是以相邻距离元为参考,利用其阵列协方差矩阵进行SVD估计子空间,根据子空间正交性,去除海杂波子空间的投影分量来抑制海杂波.时域SVD[12]法通过构造Hankel矩阵,将回波分解,置零海杂波对应奇异值后,重构时域信号从而达到抑制目的[13].由于海洋回波的特点,分解法只能削弱海杂波,不能完全消去海杂波,且大都依赖杂波先验信息,难以实现自适应杂波抑制,应用较为局限.神经网络抑制[14]算法基于海杂波的混沌性,利用神经网络复现动态系统后再检测目标信号,杂波抑制效果受重建系统与杂波的相关性影响,抑制效果不稳定.当海杂波的方位已知时,可以采用OP[15]算法抑制海杂波,但是海面的散射是连续的,通过空间投影,无法将谱点能量完全分离,OP算法抑制效果有限[16].
海杂波属于弥散性杂波而非点状杂波,针对上述问题,本文提出了基于零陷展宽(null widening , NW)的空域海杂波抑制算法,考虑到海洋的面积很大,海洋的变化是连续性的,认为海杂波是扩展的,估计的方位需要展宽处理.NW算法基于海杂波空域特征,构造NW修正矩阵,在权值应用期间,干扰可以锁定在零陷内,将修正后的自适应权值应用在雷达回波数据中,从而抑制海杂波[17].
本文介绍了NW算法抑制海杂波的原理,并分别根据仿真和实测数据来检验算法的有效性,并对比其他空域抑制海杂波算法效果.
1 NW算法原理
雷达接收信号通过自适应波束形成技术可以自动将波束形成最大幅度指向期望信号来波方向,并在干扰方向形成零陷.基于海洋运动的连续性,常规信号处理过程中应用批处理算法导致权值训练与应用数据失配,估计海杂波方向与零陷方向不匹配,不能有效抑制干扰,因此可将零陷范围适当展宽,考虑通过构建加权矩阵展宽零陷进一步抑制海杂波[18].
1.1 阵列信号模型
设有K个远场窄带信号以φi(i=1,2,…,K)的入射方向,入射到图1所示的线性均匀天线阵上,阵元的个数为N(N>K),阵元间距为d.
N个阵元在t时刻接收到的信号矢量[19]为:
X(t)=AS(t)+N(t),
(1)
式中:A代表阵列导向矢量构成的矩阵;S(t)代表空间信号矢量;N(t)表示均值为0、方差为σ2的高斯白噪声.
1.2 基于干扰位置变化模型的NW算法
设接收信号中有P个来自θp(p=1,2,…,P)方向的海杂波信号源,则回波数据协方差矩阵为:
(2)

(3)

(4)

(5)
式中,∘表示Hadamard积.
(6)

(7)

(8)
(9)

(10)
1.3 算法流程
基于NW的海杂波抑制算法的基本流程为:
1)首先对HFSWR回波数据进行两次快速傅里叶变换(fast Fourier transform, FFT)后得到RD谱,并选择一阶谱区的谱点作为待处理单元.
2)求第p个待处理单元及其邻近数据点的协方差矩阵,对协方差矩阵进行SVD分解,分成杂波子空间和目标子空间,在杂波子空间中得到干扰信号的功率rp和干扰信号的导向矢量a(θp).

2 仿真和实测结果分析
2.1 仿真实验
将海面分为30个散射块,每个散射块相位随机产生,采用无记忆非线性变换法(zero memory nonlinearity, ZMNL)算法模拟海杂波.利用仿真实验,将基于NW的空域海杂波抑制算法与其他空域海杂波抑制算法进行对比,仿真雷达参数见表1.
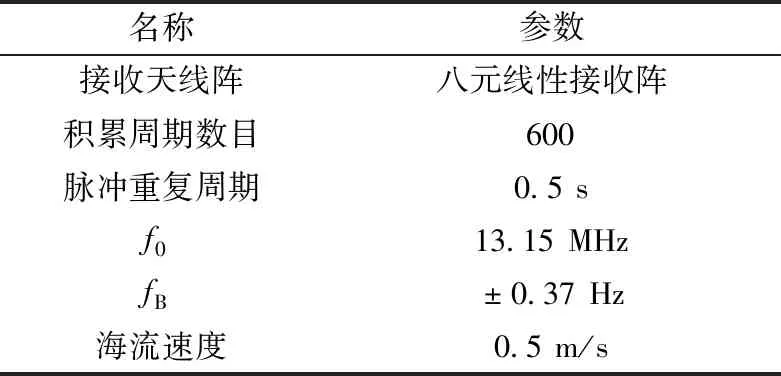
表1 仿真雷达参数Tab.1 Simulation radar parameter
表1中,f0代表雷达载频,fB为Bragg峰对应的多普勒频率,仿真雷达阵列在正东方向,仿真目标1位于雷达阵列中心东偏北45°、距离雷达站50 km,仿真目标2位于雷达阵列中心东偏北90°,两个目标速度分别为北向6 m/s和南向4.8 m/s,如图2所示.
(11)
式中,vr=v·sinθ,vr为目标运动时相对雷达阵列的径向速度.
仿真得到的多普勒谱如图3所示,海流的运动导致海洋回波的展宽,回波信号淹没在海杂波谱区.图3中实线表示仿真的海杂波谱,虚线表示利用NW算法抑制海杂波后的多普勒谱,图中标记的区域分别代表目标和海杂波所对应的多普勒频率,观察可得,经过NW算法抑制后,海杂波得到有效抑制,掩盖的目标也被凸显出来.
图4对比了3种空域算法抑制海杂波效果图,其中椭圆部分为仿真目标的多普勒位置,其中实线代表仿真的海杂波数据,图4(a)中虚线表示空域SVD算法抑制结果,图4(b)中虚线表示OP算法抑制结果,图4(c)中虚线表示NW算法抑制结果.空域SVD算法通过估计空域的子空间,去除接收信号中海杂波子空间的投影分量,从而抑制海杂波.OP算法通过计算阵列流型、对每个谱点的阵列向量进行斜投影来抑制海杂波.NW算法基于海杂波的强相关性和展宽性,通过SVD将接收到的回波矩阵分解为杂波子空间和目标子空间,之后求杂波子空间的协方差矩阵,构造加权NW矩阵,修正杂波子空间的协方差矩阵,得出新的自适应权值并应用在雷达数据中,从而抑制海杂波并保留目标.3种算法均能有效提取目标,NW算法对海杂波抑制效果最为明显,SVD和OP算法虽能检测出目标,但存在误判目标风险,如图中箭头所指位置.图4多普勒-0.34Hz处SVD和OP算法并未完全抑制海杂波,导致误判目标.
为验证算法实用性和有效性,随机仿真100次分别基于空域SVD、OP和NW算法抑制海杂波实验,蒙特卡洛实验中,仿真中划定的30个海杂波散射块的方位随机产生,方位变化范围为(0,2π),仿真目标信息不变.
图5为3种算法抑制海杂波的100次蒙特卡洛模拟实验结果.可以看出,3种算法抑制海杂波输出信号杂波噪声比(signal to clutter plus noise ratio, SCNR)变化趋势基本一致,说明空域抑制海杂波算法性能较为稳定.
在相同仿真条件下,NW算法输出SCNR比空域SVD算法最大高约7.2 dB,至少高约3.5 dB,平均高约4.9 dB;比OP算法最大高约4.0 dB,至少高约1.9 dB,平均高约3.0 dB,说明仿真情况下,NW算法抑制海杂波效果强于其他两种空域抑制海杂波算法.表2是100场仿真实验输出SCNR统计结果,仿真条件下,NW算法优于空域SVD算法和OP算法.

表2 3种算法输出SCNR仿真统计表Tab.2 Three algorithms output SCNR simulation statistics table
为验证算法对目标检测的影响,加入4个距离相同、速度和方位不同的仿真目标,4个仿真目标分别位于雷达阵列中心东偏北45°、90°、120°和160°,均距离雷达站50 km,速度分别为:北向6 m/s、南向4.8 m/s、北向5.4 m/s和南向4.2 m/s,仿真目标相对于实测雷达位置如图6所示.
当加入更多仿真目标时,从图7可以看出使用3种算法抑制前后的效果,椭圆部分为仿真目标的多普勒位置,当目标方位与海杂波方位不同时,NW算法抑制海杂波后可准确提取目标.可以看出,虽然3种空域抑制海杂波算法均可提取仿真的4个目标,但是空域SVD和OP算法抑制海杂波效果并不明显,甚至会误判海杂波展宽范围内的目标,如图中箭头标记部分,则为SVD算法抑制后导致的目标误判.
2.2 仿真结果分析
NW算法通过调整自适应波束形成器上各个阵元的权值,在海杂波信号方向上加宽零陷从而抑制干扰.在每个多普勒谱点形成的海杂波零陷展宽方向图上有效抑制海杂波,提取被海杂波掩盖的目标,但是可能会误消海杂波谱点外与海杂波主方向接近的信息.要解决这种问题,在海杂波抑制前可先提取未被海杂波淹没的目标,再进行抑制海杂波过程.空域SVD、OP算法由于对海杂波抑制效果不如NW算法,可能将未完全抑制的海杂波误判为目标,影响目标提取效果.
3 基于实测数据的结果与分析
由于目前实测的舰船数据较少,因此通过在实测数据中添加仿真目标后的数据进行验证处理,通过设定目标距离、方位和速度信息,添加时延实现仿真目标的距离偏置,每个扫频周期累加相位实现仿真目标的多普勒偏置,将仿真得到的原始数据进行一次FFT,与同样进行了一次FFT的实测数据叠加,对该数据进行第二次FFT即可得到添加了仿真目标的实测数据RD谱.
对比分析空域SVD算法、OP算法和NW算法对海杂波的抑制性能.在实测海杂波背景下,添加两个距离雷达站50 km、分别朝向和背离雷达站运动、速度分别为北向6 m/s和南向4.8 m/s的目标,带入公式(11)可得目标对应多普勒频率分别为-0.37 Hz和0.42 Hz.实测雷达参数如表3所示.

表3 实测雷达参数Tab.3 Radar parameter
选取2016年12月26日0点17分的实测数据,经过3种算法抑制海杂波前后的结果如图8所示.可以看出,海杂波抑制前仿真目标被一阶海杂波淹没,利用3种算法进行抑制后,两个仿真目标均被凸显,便于后续进行目标检测信号处理工作.
观察实测回波信号分别抑制处理后的多普勒谱,其中零多普勒处的尖峰为相干脉冲多普勒雷达频率合成器的相位噪声所导致的零频干扰.本文研究的海杂波主要用于海流反演,零频干扰影响风浪场的反演,若高频雷达仅用于探测海流,零频干扰可以忽略[21].
经过3种不同的算法处理后,正负一阶Bragg峰区域附近都有较为明显的抑制效果,仿真设定的在零频与Bragg峰之间的目标均得到保留,抑制海杂波后目标的幅度仍在18~20 dB之间.3种算法在实测过程中均能有效地抑制海杂波提取目标,相比之下NW算法抑制海杂波效果最佳.
为验证算法的有效性,选取2016年10月26日0时至6时之间东山站的连续雷达回波数据,利用3种算法进行了80场实测数据的仿真实验.图9为3种空域抑制海杂波算法输出SCNR图,可以看出在同一场数据中,NW算法的输出SCNR比空域SVD算法最大高约4.2 dB,比OP算法最大高约4.6 dB,80场数据中,NW算法平均输出SCNR比空域SVD算法高约1.80 dB,比OP算法高约2.31 dB.空域SVD算法受海洋回波相关性的影响,只能削弱海杂波,存在误判、误消情况;OP算法通过使用MUSIC算法估计海杂波的位置获取子空间会增加误差导致实测应用受限.3种算法的输出SCNR均有起伏,整体波动趋势相同.
表4是根据80场实测数据,3种算法抑制海杂波输出SCNR的统计结果,可得,实测中应用NW算法抑制海杂波输出的SCNR最大值和平均值都优于空域SVD算法和OP算法,这与仿真结果一致.由表2和表4结果可以看出,通过比较实测与仿真结果,可以看出3种空域抑制海杂波算法的实测应用效果均不如仿真效果好.产生上述现象的一个原因是实测数据的海洋回波分量比较复杂,海面的散射是连续的,并非孤立的目标,通过空间投影,无法将一阶谱区谱点能量完全分离;另一个原因是噪声的空间分布并非各向同性的,其也具备方向性,虽然其方向性较一阶谱区或明显的高阶谱区要弱,但是处于同一个量级,所以会对算法性能有影响.
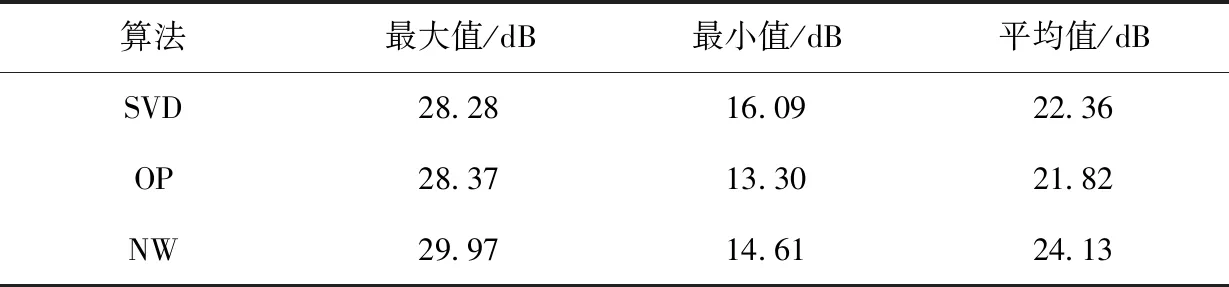
表4 3种算法输出SCNR实测统计表Tab.4 Three algorithms output SCNR statistics table
4 结论
HFSWR探测海面目标时,海杂波是干扰影响较大的因素之一,本文通过分析实测海杂波特性,认为海杂波是扩展的,对NW算法进行了理论分析和推导.海杂波作为位置不固定的干扰,将针对海杂波位置的窄的零陷展宽,更好地适配海杂波的扩展性,并将其用于抑制一阶海杂波应用中.通过对仿真和实测结果分析,验证了NW算法的性能,并比较了3种常用的空域抑制海杂波方法.得出以下结论:
(1) 空域SVD、OP算法和NW算法都能在未预先知道海杂波方位的情况下抑制海杂波,无论在仿真还是实测中,NW算法抑制海杂波后输出SCNR都高于空域SVD和OP算法.
(2) NW算法利用海杂波的扩展性,通过构造加权NW矩阵,在干扰方向形成宽的零陷,失配情况下仍然能有效消除海杂波,且不改变协方差矩阵中噪声项的贡献,实际应用中加权矩阵根据实际应用环境可事先计算,在实时抑制海杂波过程中不仅运算速度很快,而且产生比较好的海杂波抑制效果.
(3) 实测情况下,3种算法的性能均不如仿真效果好,可能是雷达接收到的回波数据中包含其他目标或目标周围杂波残余分量波动等原因导致的.