C波段雷达资料同化对GRAPES中尺度数值模式短临降水预报的影响
2022-07-26齐大鹏李彦霖周明飞朱文达
齐大鹏,杨 静,李彦霖,周明飞,朱文达
(贵州省气象台,贵州 贵阳 550002)
0 引言
短临预报一直是天气预报业务关注的重点和难题。中尺度数值模式由于时空分辨率高,同时又实现了快速循环同化更新,有效地提高了短临天气预报的质量。但是,由于模式初始场中没有包含非绝热参数,业务预报系统面临的一个首要问题是不可避免的“Spin-up”现象,导致模式前几个小时的预报特别是降水预报的质量普遍不高[1]。为解决这一问题,目前已研究出一些利用多普勒天气雷达资料反演大气三维风场、温度场和云微物理场的方法,使得模式在初始时刻就包含了云的微物理特征,改进了模式积分初始场,提高了模式的短临天气预报质量。如王瑾等[2]用ARPS模式的资料三维同化系统ARPS3DVAR和复杂云分析模块同化雷达资料后,发现模式在初始时刻就能够调整出一个合理的云微物理量场,减少了模式的热启动时间。张蕾等[3]的研究表明S波段雷达资料同化对一次暴雨过程的降水预报效果有明显提高。李平等[4]利用ARPS模式进行了C波段雷达反射率资料同化实验,结果表明雷达资料引入模式初始场后,模式的回波和降水预报效果都有一定提高。上述研究多基于WRF和ARPS模式,而在GRAPES模式方面,张艳霞等[5]用多普勒雷达资料调整GRAPES模式云参数,发现模式初始场中水汽场的修订,尤其是饱和水汽的修订,对模式预报的水汽场有明显影响,从而影响到了环流场,改善了模式的雷达回波和降水的预报。张诚忠等[6]在热启动的基础上,考虑同化雷达反演的水汽后,不仅较好地模拟了前6 h的降水,也可以预报出6~12 h的降雨带变化趋势。高郁东等[7]在模式中同化雷达降水率资料后不仅改进了降水分布,而且还能清晰地表现出中尺度对流系统的发展和消亡。张诚忠等[8]在雷达反演潜热的基础上,评估了潜热对模式短临降水预报的影响,发现通过同化雷达反演的潜热显著提高了模式短临降水预报效果。
上述研究表明通过在模式中同化雷达资料,能够提高模式的短临预报能力,然而针对贵州复杂地形条件下雷达资料同化对模式的影响研究较少,单纯的数值模拟预报偏差较大[9-10]。本文利用贵州区域C波段雷达资料,通过1个强降水天气过程的模拟实验,分析和讨论C波段雷达资料同化对GRAPES中尺度数值模式在贵州的短临降水预报的影响。
1 资料和方法
1.1 资料来源
本文所用资料有雷达数据、雨量观测数据和NCEP的GFS全球模式预报数据。雷达资料来自2017年7月9日02时贵州区域内7部CD型号多普勒天气雷达(贵阳、遵义、都匀、黔东南、铜仁、毕节、兴义)观测的基本反射率因子,雷达体扫模式为VCP21(6 min扫描9个仰角),空间分辨率250 m,最大探测距离250 km,鉴于雷达观测存在静锥区以及电磁波衰减,只选择距离雷达站50~150 km内的数据进行反演同化。降水观测资料用于模式检验,选取2017年7月9日02—08时贵州区域内1562个严格考核有质量保障的地面自动站质控后的降水观测数据,时间分辨率为1 h。NCEP数据为GFS全球模式2017年7月8日20时—9日08时的预报结果,时间间隔6 h,空间分辨率0.25°,该数据用于为模拟实验提供初始场和边界条件。本文中的时间如无说明均指北京时(BJT)。
1.2 雷达资料前处理方法
雷达资料前处理包括雷达资料质控、坐标转换、雷达组网拼图,多部雷达组网拼图时采用最邻近最大值原则进行(方法略)。
1.2.1 雷达反射率质控 贵州地处高原东侧,地形复杂,雷达回波地物遮挡严重,且C波段雷达雨区衰减较大,因此雷达反射率资料在同化前需要做必要的质量控制。李丰等[11]在现有S波段雷达地物识别方法的基础上,对C波段雷达地物回波特征进行分析,改进了识别参数的隶属函数,建立适合C波段多普勒天气雷达的地物识别方法(MCC方法)。检验表明该方法可显著提高C波段雷达地物回波的识别正确率,并可减少层状云降水回波的误判。
该方法依据地物回波主要出现在较低的仰角、回波径向速度较小、没有明显移动、回波垂直变化大等特征,计算了4个能明显区分C波段雷达地物回波和降水回波的因子(回波纹理变率、回波垂直变率、回波库间变率、中值滤波径向速度),利用隶属函数对各个识别因子进行模糊化处理,并对模糊权重求和得到识别指数IAPI 。当IAPI≥0.6时,识别为地物回波,给予消除。在地物回波识别剔除之前,还进行了孤立回波消除,质控算法详细介绍参见文献[9]。
1.2.2 雷达资料坐标转换 雷达观测资料为球坐标,需要转换成与模式相匹配的三维格点坐标。坐标转换方法采用三线性插值方法,分别沿方位角θ、径向r、仰角φ3个方向进行插值得到格点上的反射率因子。
假设笛卡尔坐标中位于(x,y,z)处的格点,经坐标转换后位于球坐标(r,θ,φ)处,两个坐标系中心点都位于雷达所在位置,r为径向距离,θ为方位角,φ为仰角。则(r,θ,φ)点处的反射率因子Z(r,θ,φ)可以用与其相邻的8个点的观测值通过三线性插值获得。
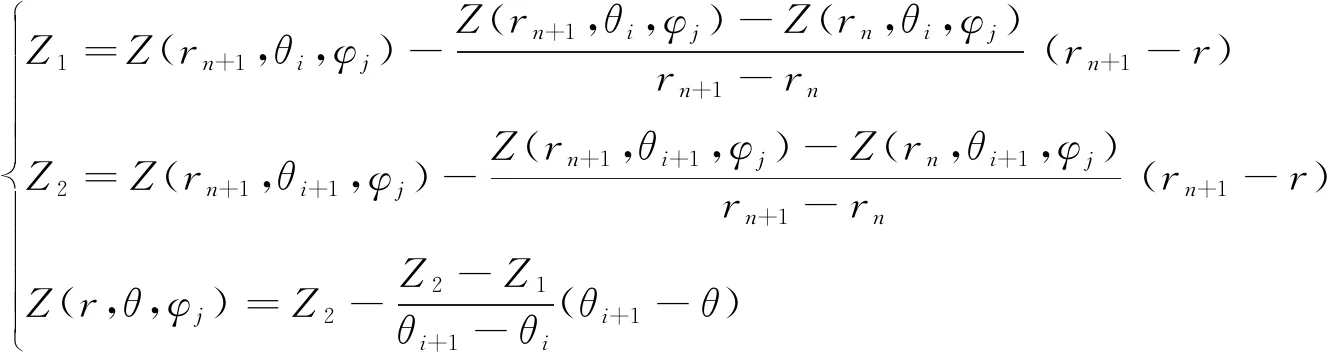
(1)
通过式(1)可得点(r,θ,φ)在它的2个相邻仰角的高仰角锥面上垂直投影点(r,θ,φj)处的反射率Z(r,θ,φj)。同理可得低仰角上的反射率Z(r,θ,φj-1)。插值过程如图1所示。
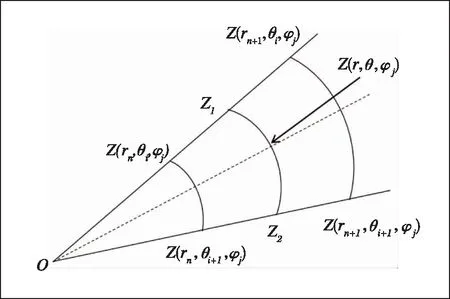
图1 双线性插值示意图
再用这2个回波值按仰角线性插值(式2),即可得到笛卡尔坐标中网格点上的值Z(x,y,z)。
(2)
1.3 同化方法
目前有多种雷达资料同化方法,张诚忠等[12],徐道生等[13]比较了几种不同的雷达回波反演技术,发现利用LAPS系统云分析方案反演云物理量并用Nudging技术调整模式水汽场是一套比较适合华南区域高分辨率模式的技术路线。
1.3.1 云微物理量反演方法 LAPS云分析模块主要分析产品包括三维的云量场、云水及云冰混合比、云及降水类型、结冰严重指数、雹混合比、云底及云顶高度等[2]。本文云微物理量反演采用张兰等[14]提出的方法,利用LAPS云分析系统对云水(qc) 和雨水(qr) 2个微物理量进行反演。首先利用模式背景场的气压和温度计算空气密度,然后根据雷达回波反演qr,公式如下:
(3)
其中,ρ为空气密度,dbz为雷达反射率因子。
云水(qc)由雨水(qr)及其下落末速度计算得到,下落末速度计算公式如下:
(4)
其中,Vt为下落末速度,P为各层气压,Ps为地面气压,qr为雨水。
为了获得qc,还需要计算1个与水成物降落有关的量ir:
(5)
其中,下标1和2表示相邻2层变量,其余项意义同上。
最后,根据ir和qr计算出qc,公式如下:
(6)
1.3.2 Nudging方法 Nudging 是在模式积分的同化时段δt内,在预报方程中增加一个线性强迫项,该项与模式预报值和实况值之差成正比,其作用是使模式预报逐渐向观测逼近[15-16]。
(7)
W为模式预报变量,∑Fi代表模式中的所有物理过程变率,α>0为张弛逼近系数,W0为对应时刻的观测值。将方程(1)对时间进行积分,并采用准隐式分步计算方法写成离散形式如下:
(8)

2 模式设计和个例实验
2.1 个例简介
2017年7月8—9日,受梅雨锋西段的影响,贵州中南部出现了1次暴雨天气过程,部分地区还出现了大暴雨。此次过程以稳定的层状云降水为主,雷达回波以层状云回波为主。过程主要影响时段:2017年7月8日20时—9日16时。9日02—08时,在锋面上有明显的带状回波自西北向东南影响贵州,在贵州中南部造成了暴雨到大暴雨天气,以下对该时段进行数值模拟实验。
2.2 模式和实验设计
模式采用华南精细预报模式,该模式是基于GRAPES的高分辨率数值预报模式[17]。模式范围:96~123.36°E,16~31.36°N,水平分辨率3 km,模式其他参数设定同文献[6]。
本文拟通过设计2种实验方案,对2017年7月9日早晨发生在贵州中南部的暴雨天气过程进行模拟,分析雷达资料同化对模式前6 h降水预报的影响。设计方案1(Exp1):当天12 UTC NCEP资料积分6 h,并将第6 h预报产品作为模式初始场;设计方案2(Exp2):Exp1背景场,同化18 UTC雷达反射率因子后的分析场。
2.3 结果分析
图2展示了2017年7月9日02—08时累计降水观测实况(图2a)及Exp1(图2b)和Exp2(图2c)2组模拟实验预测的降水空间分布情况。从图2a可以看到,此次过程强降水主要集中在贵州中南部,强降水区域呈东北—西南向带状分布,降水量级以中到大雨为主,局地出现暴雨和大暴雨,暴雨主要分布在黔南州中部和安顺市南部。对比实况和控制实验(Exp1,图2b)发现,Exp1成功模拟出了这次强降水过程中东北—西南向的强降水雨带,但是强降水位置较实况偏北且面积比实况更小。例如Exp1暴雨落区主要位于安顺市西北部,而实况的暴雨面积更大且位置更加偏南。对比控制实验Exp1和对照实验(Exp2,图2c)可以发现,同化雷达资料后的实验Exp2对强降水空间分布做了调整。可以明显看出,Exp1实验在黔南州中部、安顺市南部没有预测暴雨,存在漏报现象。Exp2实验在这些区域预测了多个暴雨点,虽然这些暴雨点面积较实况偏小,但是较Exp1实验而言更加接近实况。

图2 2017年7月9日02—08时实况降水(a) 和实验模拟6 h降水(b.Exp1;c.Exp2)
为定量描述2组实验模拟的降水在雨带位置偏差和降水强度方面的差异,利用2017年7月9日02—08时的累计降水实况和对应时段的预报降水,分别计算了5~50 mm共6个等级的降水偏差幅度和站数比。降水实况选取贵州区域1562个质控后的雨量观测站数据,预报降水为利用线性插值方法将模式输出的格点降水插值到1562个观测站上的数据,结果如图3所示。
降水偏差幅度用于描述预报降水与实况之间空间位置的偏差程度,计算公式如下:
(9)
其中,NA为预报正确的站(次)数、NB为空报站(次)数、NC为漏报站(次)数。NA、NB、NC由表1给出,表中T为降水量级。B为介于0~1之间的数,数值越小说明预测的降水空间分布越接近实况,预报效果越好。

表1 降水检验评定表
站数比通过计算实况或预测降水中大于某个降水量级T的站数和总降水观测站数的比乘以100得到。
图3a为各降水等级对应的偏差幅度,横坐标为降水等级,纵坐标为偏差幅度得分。从图3a中可以看出,未同化雷达的Exp1实验对于5 mm和10 mm等级降水预报较好,偏差幅度小于0.1。但是当降水量级大于25 mm后,偏差幅度快速增大雨带位置偏离实况越来越多,在50 mm处,最大约等于0.5。同化雷达后Exp2实验在大于25 mm的强降水量级中的偏差幅度得分较Exp1大幅减少,全部评分都低于0.1。雨带位置得到调整,相比Exp1更加接近实况分布。但是,Exp2实验在较弱的降水量级(5、10 mm)中的偏差幅度得分较Exp1反而升高了,尤其是5 mm对应的评分超过0.2,预报效果较Exp1差。
图3b为各降水等级对应的站数比率。从图中可以看到,Exp1实验预测的5 mm量级降水站数比较实况偏大。当降水量级大于10 mm以后,Exp1降水站数比低于实况,说明对于较强的降水量级控制实验降水强度比实况偏弱。对比Exp1和Exp2发现,同化雷达资料后,所有量级的降水站数比都增加了。结合实况的站数比分析发现,当降水大于25 mm后,Exp2的站数比与实况几乎一致,比Exp1的预测效果更好。而对于5 mm和10 mm的降水,Exp2站数比与实况的偏差更大,存在过度预报。

图3 2017年7月9日02—08时分等级降水预报相对实况偏差幅度(a);各等级降水站数相对总雨量站数比率(b)
为考察同化雷达资料前后模式逐小时降水预报效果差异,计算了7月9日02—08时逐小时降水站数比、偏差幅度、分等级TS评分和相关系数,结果如图4所示。
TS评分描述预报的命中情况,计算公式如下:
(10)
式中,NA、NB、NC意义与公式9相同,计算方法见表1。
相关系数反映了预报与实况之间相关关系的密切程度,是一个常用的统计学量,限于篇幅,计算方法此处省略。
图4a显示了5mm降水量级逐小时的站数比,横坐标为预报时间,纵坐标为站数比。从图中可以看到,随着时间推移,实际的降水站数先升高后下降,峰值出现在预报的第2 h,降水在前1~3 h较强,其后逐渐减弱。从Exp1实验来看,5 mm以上的站数比也呈现先升高后下降的趋势,峰值出现在第5 h,前3 h Exp1站数较实况小,第4 h后站数高于实况,6 h后逐渐降低趋近实况。总体而言,由于初始场中没有足够的水汽,导致控制实验(Exp1)在开始的前3 h降水预报偏弱,降水预报较实况存在滞后性,也就是存在spin-up问题。对比Exp2发现,同化雷达后站数比也呈现先上升后下降得趋势,但是前3 h Exp2比Exp1预报了更多的降水,与实况更接近。而且站数比峰值出现在第4 h,较Exp1提前了1 h。通过吸收雷达资料,调整初始场中的水汽,Exp2缩短了模式spin-up时间。
相应的,从前6 h内逐小时5 mm量级降水预报相对实况的偏差幅度(图4b)可以看出,同化雷达后在预报前3 h Exp2对5 mm降水量级的预报偏差幅度小于Exp1,同样说明吸收雷达资料对缓解模式spin-up问题有积极作用,但这种作用主要集中在前3 h。

图4 7月9日02—08时逐小时5 mm量级降水站数比(a);逐小时5 mm量级降水偏差幅度(b);分等级逐小时降水预报TS评分差(c);逐小时预报降水与实况的相关系数(d)
3 h后,雷达资料同化产生了副作用,例如在预报的第4~6 h,Exp2比Exp1预报了更多的降水(图4a),比Exp1偏离实况更多,图4b中4~6 h的偏差幅度对比也能印证这一点。结合图3b的分析可以看出,偏多的降水主要由10 mm以下的弱降水贡献,且主要来源于预报的4~6 h。同化雷达能够弥补模式前6 h强降水预报偏弱的不足,但是产生了更多的弱降水,导致模式对10 mm以下的弱降水预报较实况偏差幅度更大(图3a)。
图4c为利用实况和预报的降水分别检验了2组模拟实验7月9日02—08时之间逐小时累计降水预报分等级TS评分,然后对TS评分进行相减,用来定量考察雷达资料同化对模式短临降水预报效果的改进,预报降水仍然采用线性插值方法插值到1562个观测站上与实况比较。图中虚线为同化了雷达资料的对照实验Exp2分等级降水TS评分减去未同化雷达资料的控制实验Exp1对应时段的TS评分,正值表示同化雷达资料后降水预报质量得到提升,负值相反,值越大表示提升或下降越大。
从图4c中可以看到,同化雷达资料后模式前6 h逐小时的降水预报在所有降水等级中的评分都有提高。晴雨预报质量开始时刻提升最大随后迅速下降,中雨以上量级降水预报质量的提升主要集中在4~6 h,呈先上升后下降的趋势,峰值出现在4~5 h。从TS评分的变化可以看出,雷达资料的同化明显改善了模式前6 h的降水预报质量,改进主要由强降水贡献,且主要集中在第4~6 h。
从逐小时的相关系数(图4d)来看,吸收雷达资料后Exp2比Exp1与实况的相关性更高,相关系数都随时间先升高后下降,2组相关系数的差值在第3~6 h更大。总体而言,雷达资料同化改进了模式前6 h的降水预报质量。
3 结论与讨论
本文在雷达反射率因子质控的基础上,利用Laps模式云分析系统对雷达资料做了反演,然后利用Nudging方法将雷达反演的云微物理量引入中尺度模式,通过2017年贵州1次强降水天气过程模拟实验,得到如下结论:
①雷达资料同化能够改进中尺度模式的降水预报,TS评分检验显示同化雷达资料后模式前6h的降水预报在所有降水等级中的评分都有提高,同化雷达使得降水预报相关系数更高。降水峰值提前1 h,有助于缓解模式spin-up问题。
②模式降水预报的改进效果主要由强降水贡献,最大改进效果集中在第4~6 h。
③同化雷达资料后25 mm以上强降水预报站数比更接近实况,落区偏差幅度更小,降水落区和强度向实况方向得到调整。
④ 10 mm以下弱降水在吸收雷达资料后,站数比较控制预报比实况增加更多,落区偏差幅度增大,存在预报过量的问题。弱降水预报过量主要集中在4~6 h,而前3 h对降水预报的改进有积极作用。
本文的研究表明,C波段雷达资料同化,对GRAPES中尺度模式前6 h降水预报有改善作用,但是存在弱降水预报过量的问题,下一步将深入分析其原因并研究改进方法。另外,本次实验仅仅基于1个强降水个例,今后还需要选取多种类型的降水过程做更广泛的验证。