多医用配送机器人系统实时路径规划方法研究
2022-07-26董钰颖杨雷恒
董钰颖, 杨雷恒
(西安航空职业技术学院, 航空维修工程学院, 陕西, 西安 710089)
0 引言
经过长期科学研究,自主移动机器人技术已经较为成熟,并应用于航空航天、水下探测、服务、物流配送等不同领域中[1-3]。2019年12月COVID-19世界范围内蔓延后,各国医疗服务缺口悬殊的问题日益凸显,为了保证医护工作者的生命安全,减轻其工作负担,引入专用的医用配送机器人完成物品配送成为大众翘首以盼的技术革新[4]。
为了保证医用配送机器人按照任务要求实现自主移动,准确完成物品配送任务,路径规划技术是关键技术之一。它不仅在一定程度上代表移动机器人智能化程度的高低,更是其完成更高层任务的基石。由于日常配送任务繁重同时具有时间限制,单一机器人难以完成所有配送任务,需要多辆机器人协同完成[5-6]。
1 多医用配送机器人系统协同路径规划问题概述
1.1 多医用配送机器人系统日常工作特点分析
根据实地调研可知,医用配送机器人工作任务繁重,单一机器人难以在规定时间范围内完成所有的配送任务,需要多辆机器人协同完成。总结来说,多机器人系统存在如下优点。
(1) 系统工作效率高,多辆机器人系统可以将复杂繁重的配送任务分布给多辆机器人协同完成,较单辆机器人执行任务而言工作效率更高,配送任务能够更快的被执行。
(2) 系统稳定性强,多辆机器人协同执行任务能够提高系统的稳定性。当系统中某辆机器人发生故障时,通过任务重新分配给其他机器人能够保证所有任务能够按照要求完成。
(3) 经济性能好,多辆机器人协同完成任务能够有效地减轻机器人的工作负担,能够减轻每辆机器人的损耗,从而减少机器人的维修费用。
1.2 多配送机器人系统控制方法
多机协同路径规划问题不仅是机器人数量增加的问题,需要在整体上综合考虑机器人的任务分配、路径规划以及碰撞避免[7]。为了解决上述问题,需要中央控制系统作为多机器人系统的上位机,通过其建立起机器人之间、每辆机器人的通信关系,将独立的机器人紧密联系起来。目前,多机器人协同路径规划算法框架分为集中式控制框架以及分布式控制框架。
(1) 基于集中式控制框架多机器人路径规划算法
每辆机器人只与系统中央控制器建立通信,机器人之间不能直接通信。该方法优点是部署简单,统筹规划较大程度避免局部最优的问题。在目前研究中,有部分研究者在考虑时域和空域的同时引入时间窗的概念进行动态无碰撞路径规划方法探究。文献[8]提出了一种基于时间窗动态无碰撞的多AGV路径规划方法,一定程度上解决了多辆小车运行过程中的碰撞与死锁问题。Mahulea等[9]提出了一种基于Petri网的整数线性规划模型求解机器人最短路径的方法,将布尔逻辑描述的任务约束转化成一系列线性约束并整合成一个整数线性规划模型,通过模型求解计算出机器人的最优轨迹。文献[10]通过在整数规划模型中加入时间窗约束保证了所有的任务在规定的时间范围内被有效完成。上述方法均存在当机器人数量增大时,中央控制器的计算量呈指数增长的问题,对于实际环境中大规模机器人路径规划问题,该方法无法实现最优解的求解。
(2) 基于分布式控制框架多机器人路径规划算法
每个机器人根据自身所配备传感器采集的信息单独规划自己的路径和运动。在运动过程中,机器人之间不直接进行通信,具有系统灵活、鲁棒性好的优点。但是该方法仍存在缺乏全局的控制,无法保证所规划的路径为最优轨迹的缺点。
2 一种多医用配送机器人动态路径规划方法
通过对多医用配送机器人的任务特点、技术要求以及研究现状进行分析,本文结合集中控制式和分布控制式算法的优点,提出了一种高效率的实时路径规划策略。
2.1 基于滚动时域的实时在线路径规划策略
(1) 方法概述
根据实际配送中,医院道路通行情况不断变化,为了应对突发拥挤导致任务停滞的情况发生,本文设计了一种基于滚动时域[11]的周期性路径规划策略,主要实施过程如图1所示。
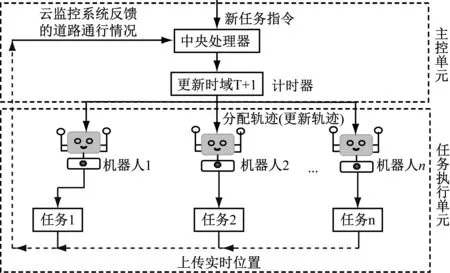
图1 基于滚动时域的多配送机器人系统总体控制框架
所谓滚动时域,即在系统中引入计时器,同时将计时器所记录机器人的工作时间划分为若干时域。每一时域初,中央控制器根据监控系统实时反馈的道路通行情况和机器人所在位置重新分析每辆机器人接下来的最优轨迹,并下达给机器人们。机器人按照规定的路径执行任务直到该时域结束,并进入到下一时域初的轨迹更新中,时域不断滚动,直到所有任务都被按时完成。
(2) 具体实施过程
首先在离线全局规划最初阶段,所有机器人处于静止状态,所有道路均处于畅通状态。机器人开始按照离线规划的轨迹运行,同时将计时器所记录的机器人执行任务过程的工作时间划分成若干个时域;每时域末,监控系统向中央控制系统反馈机器人所处位置以及此时工作环境中各道路的实时通行情况,并将此作为下一时域的初始条件,判断在当前道路通行情况下未完成的任务是否能够按时完成。若能,则机器人按照原路径轨迹执行任务;若不能,则根据机器人当前所在位置以及未完成任务所在区域再次进行规划直到所有配送任务均被完成。具体在线路径再规划策略如图2所示。
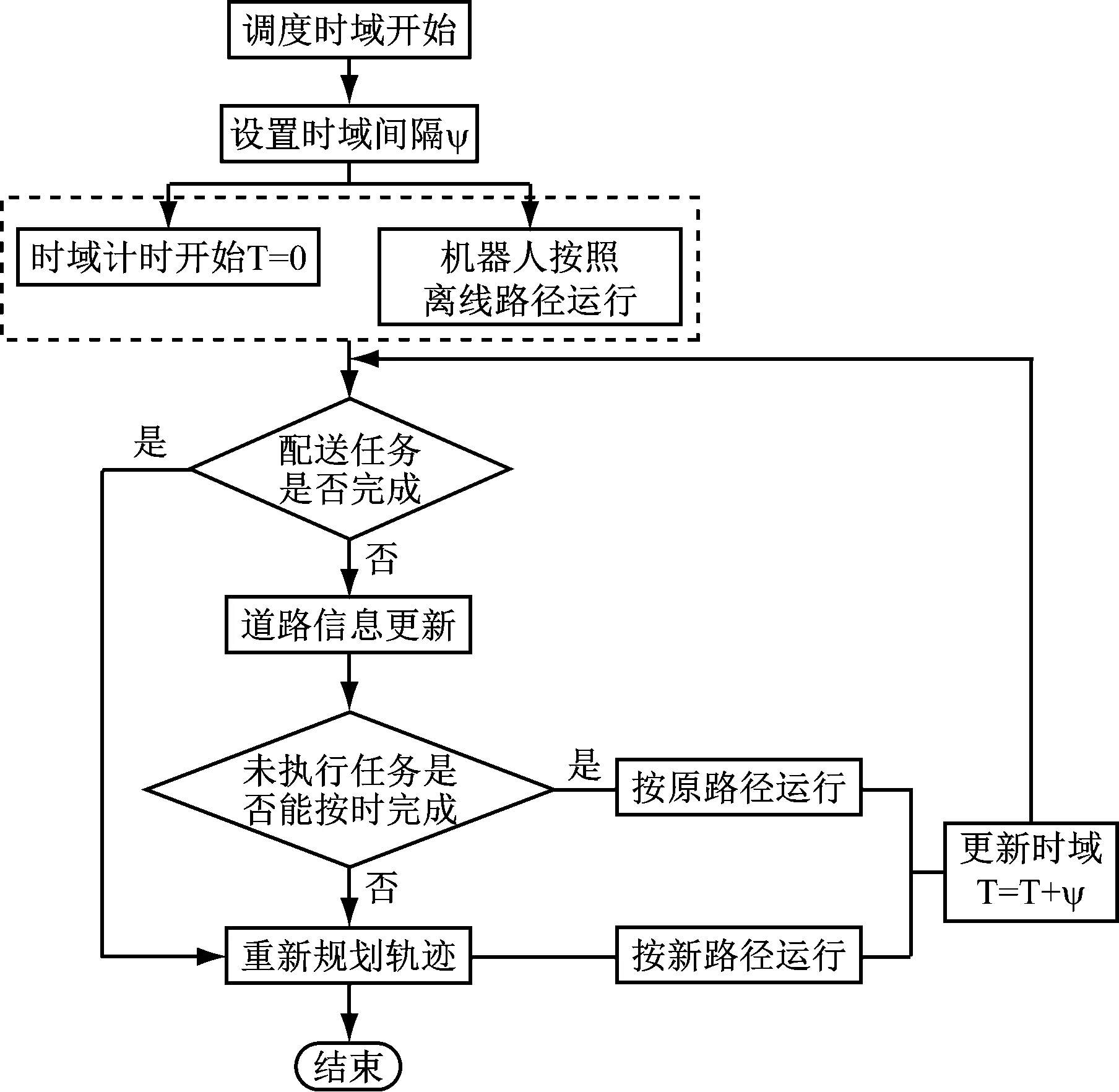
图2 在线路径再规划策略
2.2 实时冲突避免策略
由于医院中各工作区域的实时接纳量随着人流量影响而不断变化,可能导致原本容量充足的区域不允许机器人同时通过。对于上述问题,本文提出了一种基于滚动时域的出发时间安排策略,在每时域初根据工作环境中机器人的实际容纳量设置机器人的出发时间,避免机器人们同时经过冲撞区域,从而避免冲撞发生。具体实施方法如下。
(1)

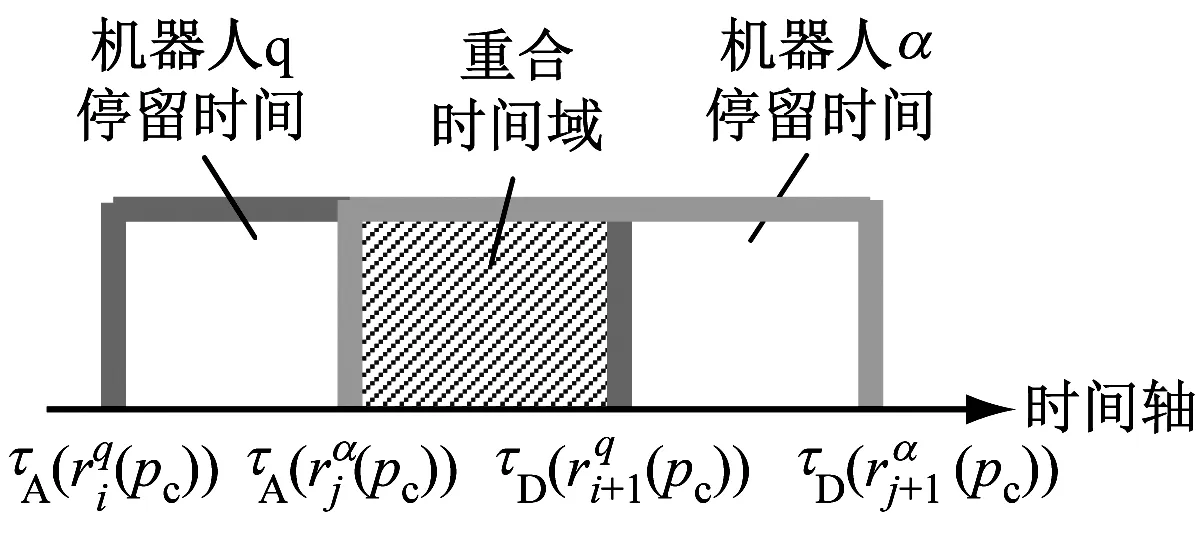
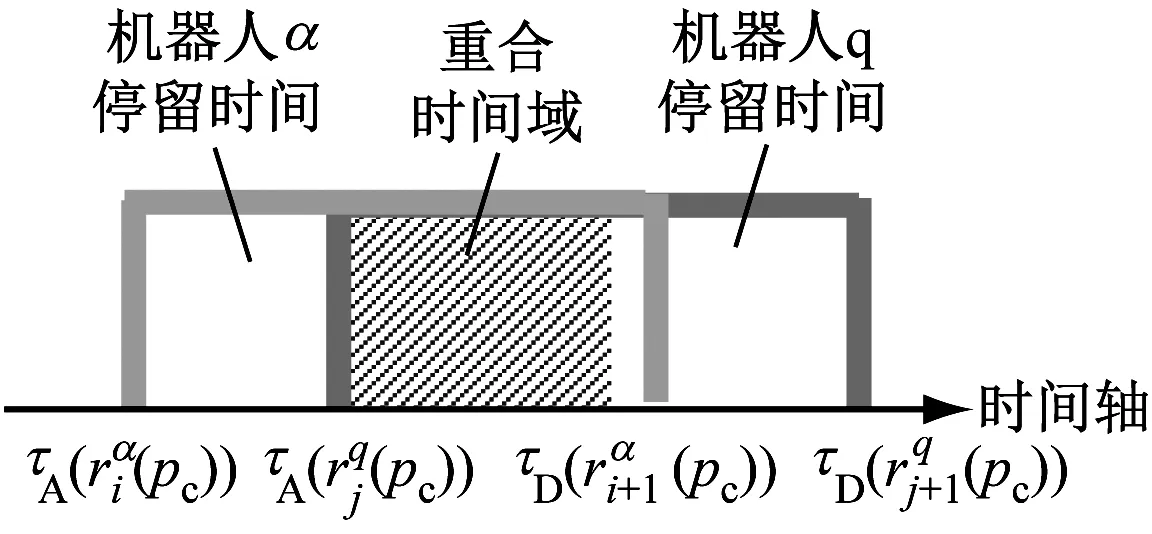
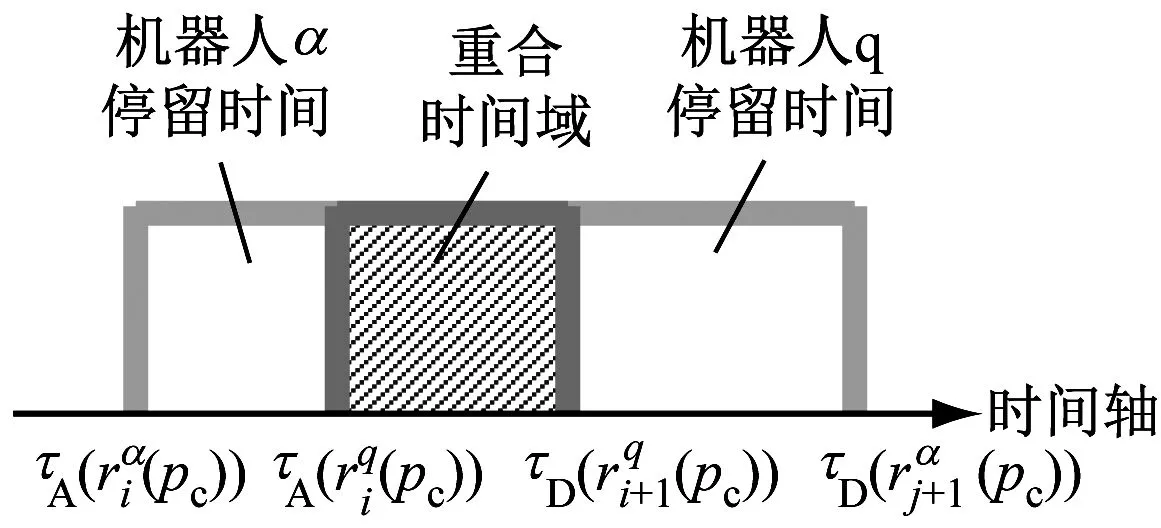
如果2辆机器人q和α在运行过程中都会经过区域pc,当2辆机器人经过该区域的时间存在如图3所示的重合时间域时,2辆机器人将因同一时段处于区域pc发生碰撞。
(a)
(b)

(c)
(d)图3 产生冲撞的时间域
通过上述发生碰撞的四种情况分析可知,只要避免机器人在重合的时间域内经过容量有限的区域才能避免碰撞的发生,因此,机器人经过容量有限区域的时间域需要满足如下不等式:

min (y1+y2)
3 总结
在本文中,考虑到实际工作环境道路信息动态变化的特点提出了基于滚动时域的离线-在线两阶段的实时路径规划方法。通过滚动时域实时反馈道路的通行情况更新道路环境信息,不断地调整机器人的运行轨迹,防止机器人因道路突发拥堵陷入死锁状态的情况发生,保证了所有的任务能够按时完成。对于环境中出现空间超负荷而不允许机器人同时经过的区域,提出了一种启动时间调整策略合理规划机器人启动时间,错开机器人通过该区域的时间,从而实现避免冲撞,为多机器人协同实时路径规划提供了有效的解决方法。
