论无人机三维倾斜摄影技术在露天矿山监测中的应用
2022-07-25程曦
程 曦
(中建材西南勘测设计有限公司,四川 成都 610000)
1 无人机三维倾斜摄影技术的优势
无人机三维倾斜摄影技术归属于现代测绘技术的范畴,以无人机为载体,集成多种先进的技术,如传感器技术、线速路由换技术(POS)、卫星导航系统(GPS)等,可快速完成数据处理,并根据所得的结果构建相关模型[1]。
1.1 真实性强
依托无人机倾斜摄影,能够获取到3D模型,通过该模型,可从不同的角度对地物、地貌等全面观察,反映出的情况更加逼真。
1.2 性价比高
3D模型常用的构建方式有三种,即激光扫描仪、传统测量结合纹理镶嵌、无人机倾斜摄影。其中激光扫描仪的效率和精度较高,但造价比较昂贵;传统测量方法的周期过长,效率偏低;无人机三维倾斜摄影不仅效率高,而且成本低,因而该技术具有较高的性价比。
1.3 易于共享
通过无人机三维倾斜摄影技术采集到相关数据,要比GIS系统获取到的数据容量小,由此给数据的传输和资源共享提供了便利条件,更易于实现大众化的应用。
2 无人机监测的露天矿山概况
本次选取某地区露天石灰岩矿区作为研究对象,无人机监测的矿区共有5个,分别用字母A~E表示。各矿区的基本情况如下。
2.1 A矿区
该矿区的地貌特征为岩溶槽,斜坡地形,西高东低,最高点的高程为418.56 m,最低点的高程为331.9 m,地形坡角的范围为25°~40°。矿区多年平均降雨量为1 110.5 mm,每年的雨季集中在5~9月,矿区内的地表溪流不发育,无季节性冲沟和常年地表水体,所有地表水均为自然降雨补给。该矿区主要开采的是石灰岩矿,供建筑工程使用。
2.2 B矿区
该矿区呈现为单斜构造,整体的地质构造较为简单,无断裂,节理裂隙不发育,地层倾角约为9°。矿山开采的石灰岩厚度为120~140 m,灰岩层理较为发育,在层面上可见清晰的斑纹状条带。
2.3 C矿区
该矿区位于斜坡地带,中山地貌,地形坡角的范围在15°~45°。矿区年均气温为17.5℃,年均降雨量为1 162.5 mm,5~9月的降雨量较大,约占全年总降雨量的68.8%,经常有大暴雨。矿区内的断层和节理裂隙均不发育,岩层的完整性比较好,地质构造较为简单。
2.4 D矿区
该矿区内的断裂构造不发育,背斜部的地层为二叠系和三叠系,翼部地层为侏罗系。矿区内的断裂构造不发育,地层倾角为44°~46°,地质构造较为简单,未见明显的断层。
2.5 E矿区
该矿区的地形为狭长岭谷,南高北低,年均降雨量为1 136.8 mm,每年的5~8月降雨量较大,经常会出现大雨或暴雨。该矿区内的矿山主要以石灰岩开采为主。
3 基于无人机三维倾斜摄影的矿山监测
3.1 无人机倾斜摄影测量系统
本次露天矿山监测中,选用无人机倾斜摄影测量系统,根据镜头的数量不同,可将该测量系统分为以下4种类型:双倾斜镜头、双倾斜+一个正视镜头、四倾斜+一个正视镜头和八倾斜+一个正视镜头。镜头越多的测量系统,操作过程越复杂,对操作人员的技术水平要求越高,综合考虑各种因素,本次研究中,采用双镜头六旋翼UAV,对露天矿山开展倾斜摄影[2]。镜头的最大像素为4 240万,在平原和低山丘陵地区的最高分辨率分别为2.0 cm和5.0~10 cm;两个镜头全部可以多角度摆动,能够获取到同一个地物,不同视角的影像,进而构成3D模型;UAV最长续航时间为30 min,具备自动返航功能,六旋翼设计能够抵抗6级风力。
3.2 测量要求
依据倾斜摄影测量的技术规范,本次露天矿山监测中,对无人机的航线设定、飞行、拍摄质量、航摄时间、精度及影像成果等,全部按照如下要求执行,以此来确保无人机倾斜摄影测量结果的准确性、可靠性[3]。
3.2.1 无人机航线设计
本次监测中,对无人机航线的飞行方向无要求,根据惯例选择东西向,若是地形条件受限,则可改为南北向。通常情况下,可以按照图幅中心线对无人机的飞行航线进行设计。
3.2.2 摄影质量
1)倾斜摄影的航向重叠应当控制在75%以内,旁向摄影的航向重叠应不小于65%。正射影像的无人机航向重叠应控制在60%~80%,最小不得低于55%,旁向则可控制在15%~60%,最小不得低于8%。可按照地物的特征及其分配情况,对重叠度适当调整。
2)相片的倾斜角度控制在2°以内,最大不超过4°;旋偏角控制在10°以内,最大不超过12°,接近最大旋偏角的相片连续不得超过3张;无人机航线的弯曲度控制在3%以内;当选用的镜头一定时,航高与影像的地面分辨率关系成反比,即无人机的航高越高,影像的地面分辨率就越低,本次实验中使用的镜头为35 mm焦距,影像地面分辨率>10 cm,航高不低于777 m,实验过程的航高控制在200 mm左右。
3.2.3 航拍时间
通常情况下,在选择航拍季节时,可以拍摄区域内最有利的天气条件作为主要依据,减少植被、覆盖物对拍摄效果的影响。基于这一前提,实验的航拍时间定在冬春季节,这个时间段测区的天气条件较好,通过拍摄区域的太阳高度角及阴影的倍数对航摄时间合理选择。
3.2.4 坐标及精度
平面坐标选用的是地理坐标系CGCS2000,高程为1985高程基准;航摄所得的正射与相邻影像图接边的误差应不超过2个像元,影像要清晰、层次丰富,能够从中辨识细小的地物,并可以构建3D模型,影像中不得存在反光、污点、烟、云等缺陷;3D模型的接边不得存在高差痕迹,模型的色彩要均匀。
3.3 倾斜摄影作业
3.3.1 前期准备
1)测量开始前,先对数字相机全面检校,避免光学畸变影响拍摄效果。本次实验中,选择控制场法:在室外选择一片比较空旷的场地建立控制场,并在相应的位置处布设控制点标志,利用精确测定的最标点与影像坐标点结合,检校模型计算,由此可以获取到精确度较高的数字相机检校参数。
2)倾斜摄影测量由无人机来完成,飞行前需检测电池的充电及电压情况,保证电压正常且充满电方可使用,并对飞行过程中使用的工具全面清点、检查并加固运输箱;开始作业前,要仔细检查无人机运输时有无损坏,重点检查螺旋桨、控制器等部件,看是否完好;上电检测,校正磁罗盘。
3)对无人机的飞行场地现场踏勘,观察飞行路线上空是否存在高压线,确保路线远离居民区、河湖、水库、鱼塘等;无人机执行飞行任务前,需要对航线合理规划,在网络地域上,对测区范围准确定位,综合考虑相关因素,如气象、作业要求等,编制短期任务规划,并在任务执行当天结合飞行情况,制定出可飞的航行路线。
3.3.2 外业数据采集
1)无人机倾斜航测的过程中,要对像控点合理布置,确保点位的数量充足,避免对后期数据处理的精度造成不利影响。
2)无人机倾斜航拍时,飞行高度为200 m左右,这个高度属于低空范畴,由于本次监测的矿区面积都不是很大,基本上都在1.0 km2内。故此,可使用红色布条制作像控点地面标志,拼接后固定在地面上,采用这样的标志能够使其与衬景间的亮度变大,可进一步增强影像的判读性。
3)依据预先设定的无人机航线,利用无人机开展数据采集作业,整个过程要密切关注无人机的飞行轨迹,看是否与设定的轨迹相符。当无人机完成飞行任务后,及时将采集到的数据转入计算机中,检查数据采集成果,看是否满足测区范围及影像质量的要求,确认相符后,将数据存储到专用的移动硬盘中,带回实验室做进一步处理。
4)在对无人机采集到的影像数据做内业处理前,要先检查外业采集的影像数据质量,以此来为后续处理工作的顺利开展提供有利条件。无人机倾斜航拍时,天气、相机等因素会影响图像的质量,图像质量下降势必造成后期三维建模的精度降低。所以采取有效的措施避免天气和相机的影响尤为重要。
3.3.3 内业处理
本次实验的内业处理工作选用一款功能强大的三维建模软件,该软件依托的是多视图三维重建技术,能够处理任意照片,将具有重叠率的数码影像导入软件后,可生成高分辨率的三维模型,整个过程不需要人为控制,软件可自行完成,构建的模型精度可以达到毫米级。内业处理的工作流程如下。
1)将无人机航拍的影像数据导入到三维建模软件当中,软件会按照每张照片的位置信息及参数信息,对照片分组,给空三加密提供条件。
2)当影像数据全部导入后,可在三维建模软件中,以自动或手动的方式完成空三加密。操作前,要为照片加入地面像控点坐标,数量不少于3个,以此来达到控制效果,并使加密点与地理坐标系相统一。具体计算时,三维建模软件通过提取照片中特征点完成自动运算,匹配同名点,反算出每张照片的姿态角,据此对各张照片之间的关系加以确定。
3)利用的三维建模软件,构建实景3D模型,利用空三加密点,软件能自动计算出TIN,进而生成不具备任何纹理信息的3D模型,随后从无人机航拍的照片中选取与模型形状位置相对应的纹理,为模型着色,由此便可输出实景3D模型。
3.4 解译标志的建立
识别并解译露天矿山建设中的各种要素是监测的主要目的,本次所选的研究对象为石灰岩矿山,下面依托无人机倾斜摄影技术构建的3D模型,对露天矿山解译标志进行建立,具体如下。
3.4.1 野外识别标志
通过无人机航拍前对试验区域的全面踏勘,以及地面像控点的布设,详细了解研究区的条件,包括采场、工业广场、固废、复垦区、主干道硬化、排水沟等。
3.4.2 影像解译标志
利用3D模型,从颜色、纹理等方面着手,建立影像解译标志,具体如图1所示。
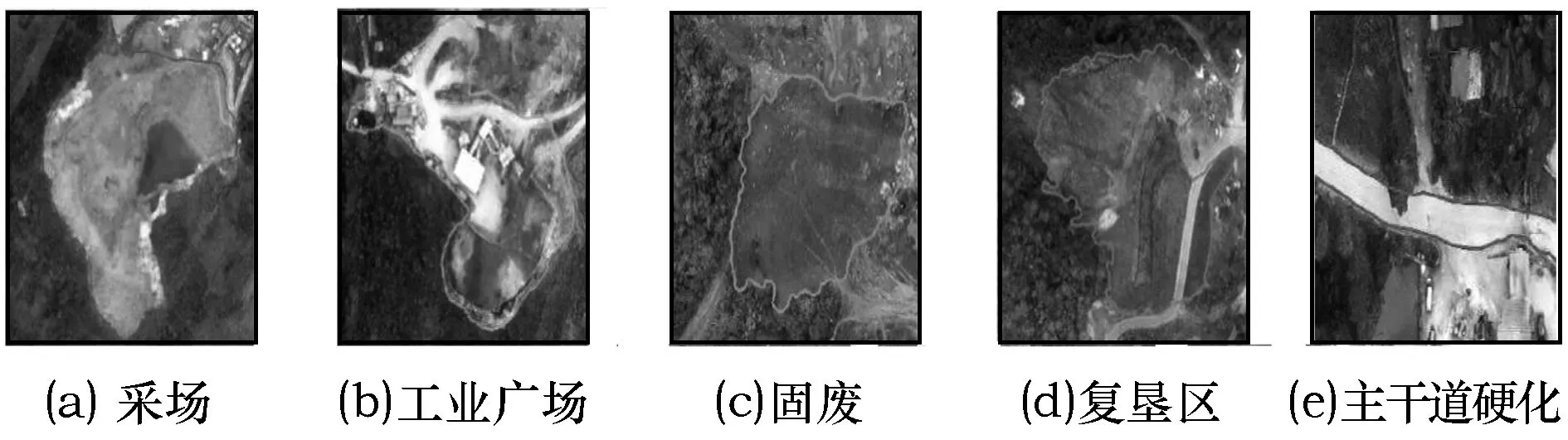
图1 露天矿山无人机倾斜摄影影像解译标志
1)图1(a)为采场,原始地貌并未发生过大的改变,无植被覆盖,在该区域在影像上与周边地区的纹理、色相均存在较为明显的差异,低于周围的地形,开采面与裸露在外的土地有所区别,边坡的纹理呈现为环形,清晰并且较为密集。
2)图1(b)为工业广场,包括以下场地:矿石临时堆场、加工场地、办公场地等。影像中,石料堆场和厂房棚顶各有不同颜色以区分。
3)图1(c)为固废,主要是露天矿山开采产生各种固体
废弃物,如废土、废渣、废石料等,在影像中,纹理相对比较细腻,呈现为近似圆形的图斑。
4)图1(d)为复垦区,从影像中可以看出,这片区域的色调以灰色和灰绿色为主,复垦初期能够看到矿山开采的痕迹,但无法看清开采作业面,从中可以看到人工种植的痕迹。
5)图1(e)为主干道硬化,在影像中的颜色为灰白色,边界有明显的台阶,比较容易辨识。
3.5 影像解译标志评价
根据上文建立的无人机倾斜航拍影像解译标志,对本次所选研究区内的A~E五个矿山进行解译,其中使用的方法为人机交互式解译,依托非监督分类,完成矿区内的地物分类,随后依据分类结果,解译出相关的要素。为检验解译精度是否达标,采取实地验证的方法,对研究区内的5个矿山进行考察,分别在各个矿山上选取验证点,数量均为10个,验证率为100%,验证结果如表1所示。
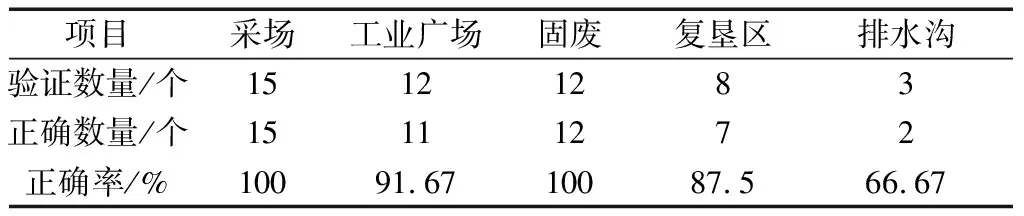
表1 无人机倾斜摄影影像解译结果验证情况
通过现场验证,解译结果的正确率达到94%以上。从表1中的结果可以看出,采场与固废的解译正确率均为100%,工业广场次之,引起解译误差的主要原因是居民点与矿区距离过近,造成建筑物混淆;复垦区的解译误差是因为解译时存在自然恢复的植被;排水沟的解译误差与居民活动有关。可见,本次应用无人机三维倾斜摄影技术建立的解译标具有较高的精度,可以在露天矿山监测中使用。
4 结束语
露天矿山监测工作开展中,可对先进的无人机三维倾斜摄影技术加以合理应用,通过3D模型的构建和解译标志的建立,为矿山生态环境监管提供可靠依据,确保矿山持续发展。未来一段时期,要加大无人机三维倾斜摄影技术的研究力度,通过改进使该技术逐步完善,更好地为矿山建设服务。
[ID:013400]
