基于自适应指数增益的滑模滤波器
2022-07-24范正琪金山海
范正琪 金山海

摘要:为了提高传统濾波器的性能,改善其在远距离跟踪目标时收敛速度慢的问题。本文提出一种自适应指数增益滑模滤波器,此滤波器能够在距离滑模面远处获得大的增益,迫使系统状态加速收敛,在距离滑模面近时获得一个小增益,不损失滤波器的滤波效果。并将基于自适应指数增益的滑模滤波器进行仿真验证,证明了其在开环条件下具有更优越的性能。
关键词:滑模;自适应;指数增益
1引言
控制系统中常使用传感器进行信号采集,但由于环境等各种不确定因素,传感器采集的信号容易被噪声破坏干扰,被干扰后的传感器信号会降低系统的性能甚至影响系统的稳定性。因此,需要使用滤波器对被噪声干扰的信号进行滤波处理。很多学者为达到不同的目的,提出了各种不同的滤波器[1-5],如卡尔曼滤波器、中值滤波器、滑模滤波器等,滑模滤波器作为一种物理实现简单的非线性滤波器,被国内外学者广泛研究。
Jin等提出的一种结构简单的滑模滤波器(TD-J),此滤波器的主要优点是并不需要对信号源进行建模,且当输入恒定时,可以实现输出对输入信号的有限时间收敛,并可以有效去除随机噪声。但其存在系统状态远离跟踪目标时收敛速度过慢的缺点。针对TD-J这一缺点,本文提出一种基于自适应指数增益的滑模滤波器,在距离滑模面远时此滤波器获得大的增益,迫使系统状态在远离滑模面时加速收敛。在距离滑模面近时获得一个小增益,提高滤波器的滤波效果。
接下来在第二部分是TD-J的工作原理,第三部分是本文所提出的基于自适应指数增益滤波器的工作原理,第四部分是TD-J和基于自适应指数增益滤波器的仿真验证,第五部分是结论。
2传统滤波器的工作原理
Jin等提出了TD-J,其连续时间表达如下:
其中,u是输入,x1和x2是系统状态且x2是x1的微分,参数F>0。函数gsgn(A,z,B)有如下定义:
在式(3)中,当其中的σ=0我们可得如下关系:
式(5)表示的曲线即为滑模面,根据滑模面与系统状态x2,可将x1-x2的状态空间分成σx2>0、σx2<0、σx2=0的区域,如下图1所示:
到达目标状态。
3基于自适应指数增益的滑模滤波器
为了解决TD-J存在的问题,本文提出一种基于自适应指数增益的滑模滤波器,其表达式如下:
其中,β>0。
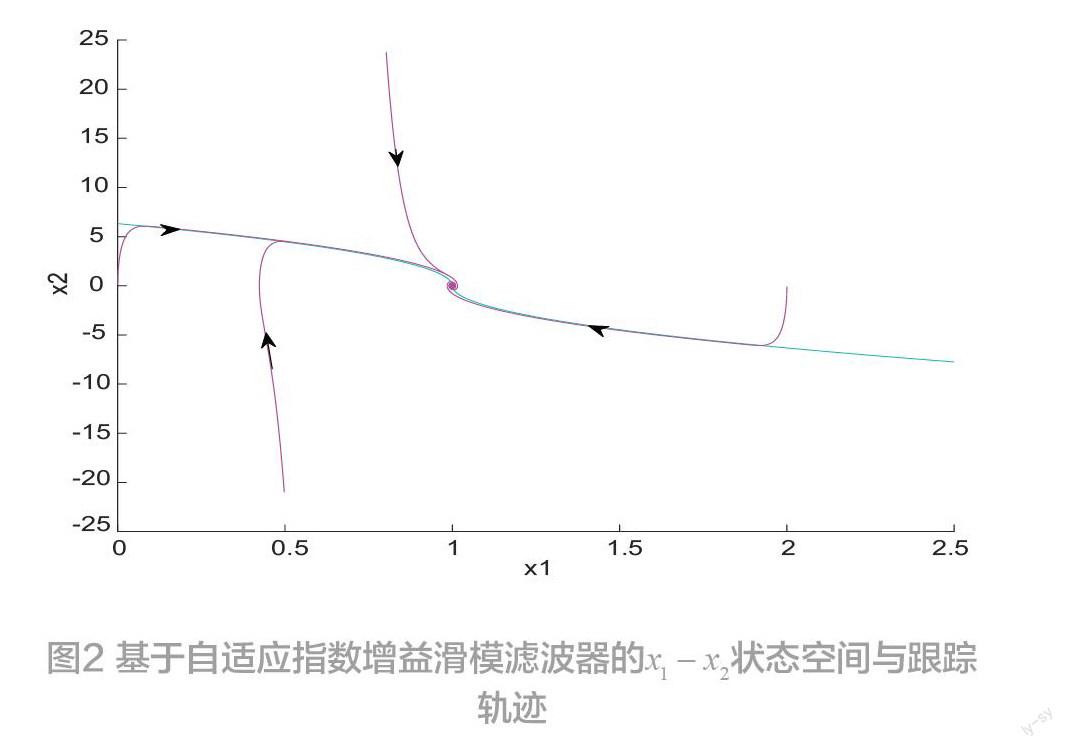
基于自适应指数增益的滑模滤波器x1-x2状态空间与状态轨迹如图2。
4仿真验证
对比两种滤波器在初始状态为x1=x2=0无噪声干扰的情况下,阶跃响应的时域图,如图3所示,由图可以看出,新滤波器在无噪声干扰的阶跃响应下,能更快的到达目标状态,响应时间更短。
对比两种滤波器在初始状态为x1=x2=0的阶跃响应的滤波效果,如图4所示,由图可以看出,新滤波器在阶跃响应下的滤波效果更好。
对比两滤波器在初始状态为x1=x2=0余弦响应时滤波效果对比,如图5所示,由图可以看出,新滤波器响应更快。
5结语
本文提出的基于自适应指数增益的滤波器相对于TD-J响应更快,达到了远距离加快收敛的目的。下一步工作如下:
(1)还需对提出的新滤波器用其他信号进行效果验证,观察新滤波器是否达到预期提高滤波器性能的目的;
(2)还需进一步调整指数项P的值,寻找最佳值;
(3)还需采用另一种无抖振的离散方式,消除抖振。
参考文献:
[1]蒋明.数字滤波器的设计与算法实现[J].微电子学与计算机. 2020,2(1):16-19.
[2] GALLAGHER N. Wise G. A theoretical analysis of the properties of median filters[J]. IEEE Transactions on Acoustics,Speech,and Signal Processing,1981,29(6):1136-1141.
[3] JIN S,LV Z,XIONG X,YU J. A Chattering-Free sliding mode filter enhanced by frst order derivative feed forward[J]. IEEE Access,2020,8(1):41175-41185.
[4] UTKIN V I,POZNYAK A S. Adaptive sliding mode control with application to supertwist algorithm:Equivalent control method[J]. Auto Matica,2013,49(1):39--47.
[5]宋波,陈江,于再兴.调频滤波器研制初探[J].军事通信技术.2001.22(1):1-8.
[6] JIN S. KIKUUWE R,YAMAMOTO M. Parameter selection guidelines for a parabolic sliding mode filter based on frequency and time domain characteristics[J]. Journal of Control Science and Engineering,2012,2012(Pt.2):1-13.
[7] JIN S. KIKUUWE R,YAMAMOTO M. Real-time quadratic sliding mode filter for removing noise[J]. Advanced Robotics,2012,26(8-9):877-896.
