基于SLAM 的楼层巡检智能车设计
2022-07-24王仕仪张学峰赵增旭
王仕仪 张学峰 任 彬 郁 洋 赵增旭
(石家庄铁道大学 机械工程学院,河北 石家庄 050000)
住宅区、办公区是各种室内突发事件的主要场所。为防患于未然,楼层巡检工作必须到位。而由于巡检工作的高度重复性、监控视野盲区与部分突发事件的危险性,容易出现漏检、效率低、危及巡查者人身安全等问题。机器人辅助代替人工巡检,提升巡检工作智能化水平显得尤为重要。目前,楼层智能巡检方面大多依赖轨道式巡检机器人,其灵活性受到限制,无法高效处理随机事件。本项目旨在研究面向楼层巡检的自主导航智能车设计,利用SLAM 技术实现巡检无人车的自主定位与导航,在此基础上增添辅助结构可实现多功能全方位智能巡检[1]。该设计结构可以减轻巡检压力并有效规避突发风险,加强对楼层突发事件的应急速度,有效提升巡检效率[2],守护居住人员的财产安全。
1 总体设计
楼层巡检小车采用霍尔编码器减速电机作为底盘驱动力,控制系统由上位机树莓派4B+和PC 虚拟机,配合下位机OpenCRP 控制板,实现平台的控制和通信功能。驱动系统采用四轮独立悬挂全向移动底盘,实现全方位移动。其主要传感器包括编码器、MPU6050,激光雷达,实现平台与外界的信息交互。通过对机械结构的设计确定巡检车的尺寸大小,车轮选择,车轮摆放顺序号等,在此基础上进行巡检车的各个车轮的运动结算,对运动模型进行设计。对控制系统搭建要确保上下位机的正常通信,工作站与树莓派的正常话题收发。
本文采用同局域网下ssh 连接实现。在以上基础上,通过SLAM 的导航进行地图构建,实现小车的自动巡检功能[3]。
2 机械机构设计
小车的整体设计设计尺寸为20cm×20cm×15cm,小车的底盘结构部分由四麦轮全向移动底盘及独立悬挂装置组成,驱动层平台采用“O 形”麦克纳姆轮全向移动底盘。可实现全方位移动,提升巡检工作的效率与灵活度[4]。另外在底盘中心配备传感部分,小车的上层由激光雷达和摄像头模组组成,激光雷达负责扫描构建地图及自主定位,摄像头模组可以实现图像的识别等,其主要组成结构如图1 所示。
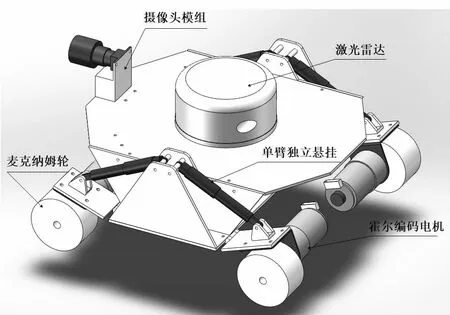
图1 小车主要组成结构
3 软件设计
3.1 控制系统搭建
上位机使用树莓派4B 开发板,提供4GB 内存,拥有充分的计算能力。下位机采用OpenCRP 全向轮麦轮小车主控板,以STM32F103RCT6 芯片作为主控,集成MPU6050 模块、TB6612 电机驱动模块、稳压芯片。
3.1.1 远程控制
PC 端虚拟机与树莓派连接到同一个局域网,通过ssh 进行连接,工作本与树莓派连接到同一个rosmaster下,在树莓派上开启topic 话题,发布msg 消息给各个node 节点。树莓派4B+可以运行移植到ROS 系统中的动能包,包括底层驱动脚本。键盘控制脚本。SLAM 算法功能包等。通过串口将控制指令发送给OpenCRP 控制板等设备。
3.1.2 闭环控制

运行gmapping 建图导航算法后,虚拟机通过Rviz,实现数据在PC 端远程显示。
3.2 基于SLAM 的导航地图构建
GMapping 算法实现
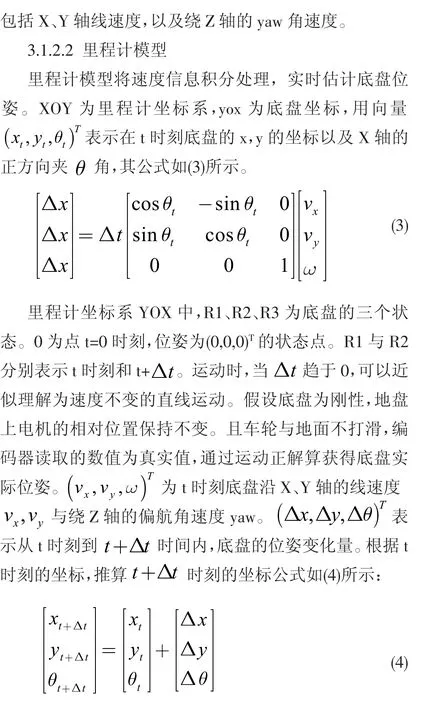
本设计基于ROS 系统,调用openslamgmapping 算法实现。先将激光雷达数据与里程计数据, 通过ROSgmapping 封装之后, 发送给openslamgmapping 算法包。算法包优先处理定位问题,使用RBPF 粒子滤波,将里程计数据进行处理,得到无人车位姿状态的概率估计值。在获得定位的基础上, 对激光雷达数据进行初步处理,获得初始地图。通过ROS 新获得的粒子与已产生的地图进行传感器数据匹配[6]。不断矫正里程计误差并添加新的传感器数据scan 作为地图[7]。最终输出基于概率的二维栅格化地图,如图2 所示。
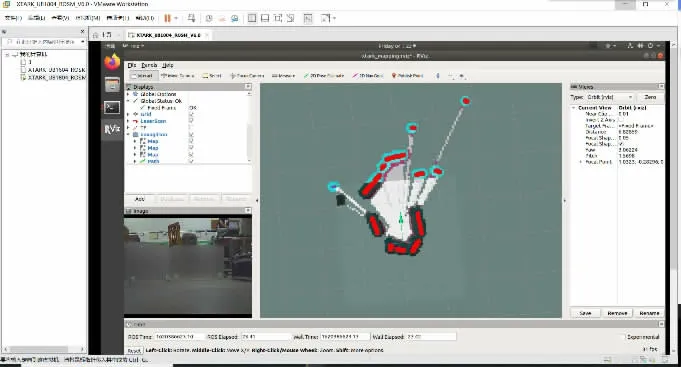
图2 生成地图
3.3 路径规划与导航系统实现
无人车移动平台发布传感器信息,虚拟机发布导航的目标位置,navigation 功能包即可实现导航的功能。其中move_ base 提供主要的运行、交互接口。amcl 实现对无人车自身的精确定位。
move_base 主要由两大规划器组成全局路径规划与本地实时规划。全局路径规划是根据目标位置规划总体路径。本地实时规划,在每个周期内,针对实时的环境信息做出相应行动。主要算法有A*算法[8]。
3.3.1 Dijkstra 算法

f(n)是节点n 的综合优先级,首选优先级高的节点,即f(n)最小。g(n)是节点n 距离起点的代价。h(n)是节点n 距离终点的预计代价,也就是该算法的启发函数[5]。A*优先选取f(n)值最小为条件,寻找下一个遍历节点。通常用集合open_set 和close_set 分别表示待遍历和已遍历的节点。
4 小车智能巡检实验测试
将所建地图分别保存在树莓派和虚拟机端。虚拟机连接树莓派,在树莓派端运行nav.launch 导航节点,并调用建立的GMapping 地图。节点启动后,在虚拟机终端运行Rviz 并配置导航文件。绿色箭头起点代表无人车大概率所在位置, 箭头朝向代表无人车正方向。灰黑色地图为此时全局地图。大红点围成的地图,为雷达扫描的局部地图。若此时全局地图与局部地图特征网格不匹配,可以使用“2D PoseEstimate”按钮对无人车位姿进行校准。
发布一个目标点之后,无人车周围密集小箭头位姿估计将会集中到实际位姿附近。并生成一条全局规划路径,以及一条局部规划路径。无人车将跟随路径, 自动导航和避障到指定位置。多点连续导航与单点导航的前期准备相同。相比于单点导航,执行多点连续导航通过该按钮在地图上发布多个目标操作, 通过Rviz 中的“Publish Point”实现,无人车将会依次前往设置的目标位置,如图3 所示。

图3 目标点设置
中间的两个黑点表示障碍物,中的绿线和红线分别代表全局与局部的规划路线。从起始点到0 点与从0 点到1 点,从1 点到2 点均自主导航行与避障行驶至目标点。
结束语
本作品采用分层结构设计,为保证底盘的平稳性设计单纵臂式独立悬挂系统,上层传感部分搭载锐尔威视摄像头模组和思岚激光雷达,配合树莓派4B+,能够实现自主巡航与避障功能,在录入不同的地图环境后,既可实现自主巡检,又可以实现自动多点自动巡检扫描,同时可以上传实时图像,实现楼层无死角监控,使后台人员可及时对正常监控无法覆盖的地方进行无盲点监控。可以实现多功能楼层巡检智能化。但在对于避障的准确性和快速性方面仍然有一定的提高空间,这也是我们下一步研究的方向,此设计对提高无人车自主导航的准确性和鲁棒性等问题具有一定的科学意义和工程实用价值。
