基于GF5-AHSI遥感数据的横沙浅海水深反演
2022-07-23张勇勇
张勇勇
(上海勘测设计研究院有限公司,上海 200434)
0 引言
上海市横沙区域为典型的滩涂地貌,位于海陆交接处,是海岸带的重要组成部分。水深可以间接反映滩涂水下部分地形,对其掌握的程度影响着航运、浅海资源生态保护和海岸带管理等[1]。目前传统的水深测量方法是利用测深船测出水域中各点的水深值,该方法需要消耗较多人力和物力[2],不利于实现高频率测量,并且在浅水区域存在局限性。遥感技术较传统手段具有覆盖范围广、成本低、周期性强等优势,被应用到水深反演方面,成为了传统水深测量的一种有力补充[3]。
在水深遥感探测方面,国内外学者做了大量研究,也取得了一些成果:郭晓雷 等[4]利用WorldView-2卫星遥感数据,通过线性回归的方法建立了水深数据与光谱反射率值之间的线性反演模型,发现多波段模型在0~5 m的浅海区水下地形反演中精度较高;潘雪峰[5]利用Landsat-5和悬浮泥沙质量浓度数据,建立了表层悬沙反演模型,并探究了表层悬浮泥沙质量浓度对光谱反射率的影响程度,提高了水深反演精度;CLARK[6]探究了不同波长的光波在纯水中的吸收系数以及对应关系,发现蓝光在水中的穿透力优于其他波段;BIERWIRTH et al[7]利用多光谱影像和水体衰减系数推导出计算水底反射率的方法,并将该方法应用于澳大利亚西部海湾地区的水深反演中,取得了较好的效果;陈勇[8]利用光学卫星影像提取水边线,结合瞬时潮位站数据,通过时空模型估计水边线的高程,建立了潮间带数字高程模型(DEM);杨立君 等[9]提出了基于植被边线、冲淤痕迹线、水边线等多元特征线,结合实测数据反演滩涂地形的遥感测量方法;邱耀炜 等[10]基于WorldView-2数据和随机森林算法,建立了甘泉岛区域的水深反演模型,模型精度较高;ISAAC et al[11]研究发现随机森林算法在解决非线性问题上具有优势;吴忠强 等[12]以哨兵-2A和资源三号卫星等多元遥感数据,结合电子海图等数据,基于去云融合和多种方法进行水深反演,研究发现小波融合去云可以改善有云区域对水深反演的影响,从而提高反演精度。
综合来看,目前通过遥感数据进行水深反演的思路主要有两种:基于单波段和多波段的水深反演,后者效果更好[13],也取得了一定的成果,但是也存在一些问题,比如,建模大多选用多光谱数据,相关性较好的波段有限;单波段和双波段模型居多,反演效果不够理想。因此,本研究选用了GF5-AHSI高光谱遥感数据,其拥有丰富的波段及信息,通过数据变换和相关分析筛选出敏感因子,结合单波段比值法、多元线性回归法、最优标度回归法和BP神经网络法建立水深反演模型,并对模型精度和可靠性进行了验证和比较。
1 数据采集与处理
1.1 研究区概况
横沙岛由来自长江中上游的泥沙淤积而成,属于典型的滩涂地貌。本文研究区域位于横沙岛东端的滩面,范围为31°13′—31°20′N,122°07′—122°15′E(图1)。整个区域水深较浅,平均为5 m左右,最大水深值不超过10 m,位于长江入海口,水体较混浊,泥沙含量较大。

图1 横沙滩涂地理位置
1.2 遥感数据的采集与处理
本研究所用的遥感数据为1景GF5-AHSI卫星影像,成像时间为2019年3月27日12:58,影像共包含330个波段,波段范围为400~2 500 nm,涵盖了可见光至短波红外波段,影像空间分辨率为30 m,光谱分辨率(可见光范围)为5 nm。部分信号波段无数据,剔除后有效波段数据为292个。
选用ENVI软件对获取的遥感影像进行辐射定标和大气校正。辐射定标使用Radiometric Calibration模块完成;大气校正采用FLASH模型,所用参数来源于卫星头文件。图2展示了同一像元经过大气校正后的结果对比,左图对应原始影像,右图为大气校正后结果,可以看出,大气校正消除了部分异常噪声。
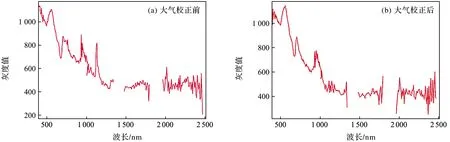
图2 同一像元大气校正结果对比
实测水深点对应的光谱反射率数据通过ENVI软件处理获得:导入水深点经纬度坐标文件,根据水深点经纬度坐标检索到对应位置的像元,通过ROI工具提取对应光谱反射率数据,可将结果另存为csv文件。
1.3 水深数据的采集与处理
2019年3月27日12:00—14:00,通过搭载有高精度GPS定位的测深船对水深数据进行了采集,共获取1 785个水深点数据。
采用2019年3月27日13时,研究区域西南方向的“北槽中”站的潮位数据,对实测水下地形数据进行潮位改正,将对应的吴淞高程转化为同时期水深值:
X=hc-d-hd
(1)
式中:X为与卫星影像同时期的水深值数据,hc为潮位数据,d为理论最低潮面在吴淞零点下的距离,hd为实测获得的水下地形高程值。
1.4 水深数据样本划分
本文所用水深数据样本总数为1 785个,用于实验的样本数为595个,其中建模样本数为445个,精度检验样本数为150个。样本的选取方法如下:第一步,确定实验样本点,测线上每3个点中选择一个样本数据为实验样本;第二步,建模样本和检验样本的划分,每相邻的3个实验样本为1组,随机选取1个为检验样本,剩余为建模样本。各样本的选择均符合均匀分布、随机选取原则。测线布设如图3所示。

图3 测线布设图
2 模型建立与评价方法
2.1 水深反演建模方法
本研究共使用了单波段比值法、多元线性回归法、最优标度回归法和BP神经网络法4种建模方法,其中后3种模型为多元模型。在建模之前需要先通过相关分析,依据水深值和光谱反射率相关系数绝对值的大小筛选出建模因子,相关系数计算公式为
(2)

对光谱反射率数据进行比值变换、对数变换(Ln)、一阶微分变换(DE)和对数的一阶微分变换(LD),然后分析变换后的数据与实测水深值的相关性。其中一阶微分用差分形式表示,公式为
(3)
式中:D(λ)为光谱变换后的光谱反射率数据,R表示对应的光谱反射率,λ表示波长,Δλ表示波长差。
选取相关系数绝对值最大的波段,求得其他所有波段的光谱反射率数据与之的比值,确定相关性最大的波段比值组合为单波段比值模型的建模因子;对数据变换结果进行相关分析,筛选相关系数绝对值较大的波段及其组合作为多元模型的建模因子。其中,单波段比值法、多元线性回归法、最优标度回归法通过SPSS软件实现建模,BP神经网络法通过编程实现建模。
网络参数设置对BP神经网络模型的精度和可靠性有很大影响,选择合适的参数对模型结果很重要,BP神经网络模型的常见参数包括隐含层数、学习速率、平滑因子、学习误差和分级迭代级数等[14]。目前研究区在BP神经网路模型的参数设置方面无比较成熟的结论可供参考,因此通过大量实验,网络参数最终设置为:输入层为6,对应筛选出的6个波段的光谱反射率数据;输出层为1,对应样本的水深值数据;隐含层数为18,学习速率为1.5,平滑因子为0.7,学习误差为0.03,分级迭代级数为14。
2.2 模型精度评价方法
本研究采用决定系数R2检验模型的稳定性和可靠性,通过检验样本的均方根误差RMSE、平均相对误差MRE和模型的sig值对水深反演模型的精度进行评价。其中sig值通过SPSS软件计算,R2、RMSE和MRE值由下列公式算得:
(4)
(5)
(6)
式中:Xi为实测值,Xm为实测值的平均值,Yi为预测值,n为样本数,n-k-1为残差平方和的自由度,n-1为总体平方和的自由度。通常,sig<0.05,说明模型是显著的;R2越大,模型的稳定性越好;RMSE值和MRE值越小,模型精度越高。
3 高光谱水深遥感反演
3.1 水深点高光谱特征
研究区域的实测水深值范围为1.78~8.47 m,符合浅水区水深值范围。选取几处不同水深点的光谱曲线进行分析,结果如图4所示。从结果中可以看出:

图4 不同水深样本点光谱特征
(1)不同水深点的光谱曲线符合水体光谱反射特性的大体规律,蓝绿波段反射率高,近红外波段反射率低,在550 nm附近存在反射峰;
(2)在1 000 nm、1 200 nm、1 300 nm和2 400~2 500 nm 附近,存在比较明显的噪声,出现一些光谱反射率值陡然增大的点;
(3)不同水深点光谱反射率存在差异,但差异很小。
3.2 水深敏感波段的确定
通过前文所述的相关分析方法确定水深敏感波段作为建模因子,图5为经过不同变换的光谱反射率数据与实测水深值的相关分析结果。从图中可以看出:
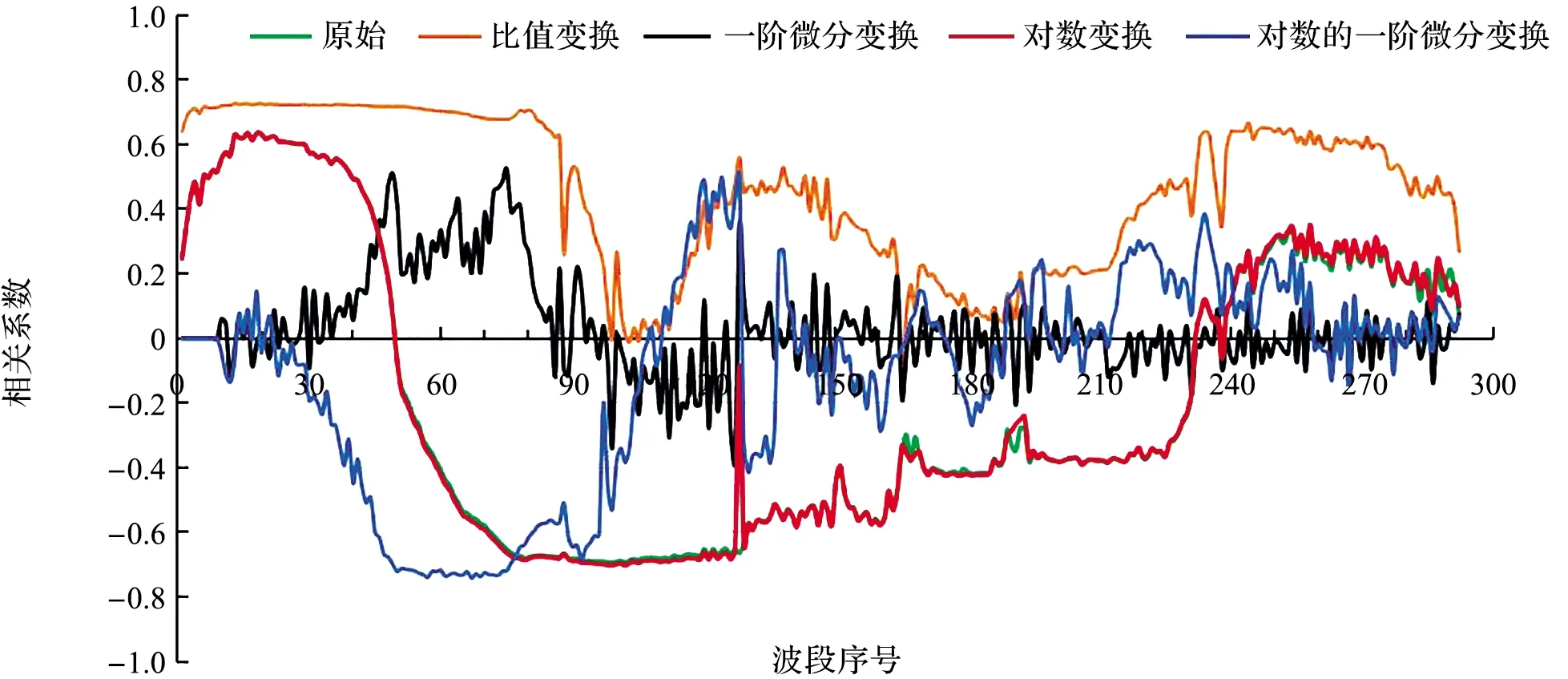
图5 光谱反射率和水深数据相关分析结果
(1)原始光谱反射率与水深值相关性结果中,B15(450 nm)~B30(524 nm)和B80(728 nm)~B120(899 nm)附近光谱反射率与水深值相关性较高,相关系数绝对值超过0.6。根据相关分析结果,B99(809 nm)处原始光谱反射率与水深值相关性最高,达到了-0.694,因此选取B99(809 nm)与其他波段进行比值变换。
(2)比值变换和对数的一阶微分变换有效地提高了部分波段处光谱反射率与水深值的相关性,相关系数绝对值的最大值超过了0.7,提升效果明显。
参考图5的结果,确定相关系数绝对值最大的波段比值组合B13/B99(B13对应波长为442 nm,B99对应波长为809 nm)为单波段比值模型的建模因子,同时兼顾同一波段重复利用对模型精度的影响,最终从相关系数绝对值大于0.69的波段变换结果中筛选出6个因子用于多元模型的建模(表1)。

表1 选取的6个建模因子
3.3 水深反演模型结果及对比分析
建立的水深反演的单波段比值模型和多元线性回归模型分别为:
(7)
hw=1.068B98-0.412LD57-0.462LD67-
(8)
式中:hw表示反演的水深值,其他参数对应表1中的建模因子。
神经网络模型根据2.1节中的参数进行设置后运行程序,获得反演结果;最优标度回归模型是通过SPSS软件的自带算法,将表1中筛选出的建模因子作为自变量输入,获得相应的反演结果。
分别计算4种模型的R2,RMSE,MRE和sig值,结果如表2所示,数据显示:

表2 4种模型的精度评定结果
(1)4种模型的sig值均小于0.05,说明模型结果均为显著的。
(2)比较模型的RMSE、MRE和R2发现,最优标度回归模型RMSE最小,为0.47 m;MRE值最小,为7.99%;R2达到了0.972,精度最高,可靠性好。BP神经网络模型精度尚可,RMSE为0.97 m,MRE为 15.71%,R2为0.829。其他两种模型的反演效果不理想,R2均低于0.7。
(3)多元线性回归模型的精度和可靠性最差,在一定程度上说明水深值和光谱反射率之间不是简单的线性关系。
为进一步分析4种模型的反演结果,对比了150个检验样本在不同模型下的估测结果(图6)。从图6可以看出:

图6 4种模型实测值与预测值对比结果
(1)单波段比值模型和多元线性回归模型的估测结果较为离散,不能反映水深值的真实情况,多数样本点估测值大于真实水深值。最优标度回归模型和BP神经网络模型的反演结果较好。
(2)最优标度回归模型的反演结果中,有较多样本点的预测水深值小于实测水深值,说明最优标度估测模型的反演结果偏小,BP神经网络模型的估测结果也存在类似的趋势。
重点分析精度和可靠性最好的最优标度回归模型,图7为最优标度回归模型检验样本的残差值和相对误差曲线。由图可见,预测水深值和实测水深值最大差值为1.92 m,对应3 m处水深点样本;最小差值为 0.01 m,对应5.5~6.5 m附近的水深点样本。相差偏大的点多出现在5 m以内的水深区域,且残差多为正值,说明多数样本点水深估测值偏小。总体上,残差值落入[-0.2,+0.2]区间的样本点有78个,占比达52%;残差值大于0.5 m的样本点有25个,均为水深值小于5 m的样本点,占比为17%;残差值落入[-1,1]区间的样本点占比高达96%。相对误差优于5%的样本数为90个,占比达60%;相对误差超过30%的样本点仅4个,水深值均小于3.5 m。总体上,小于5 m的水深点相对误差偏大。图8为最优标度回归模型反演结果与实测结果的对比图,由图可见,反演结果与研究区域实际地形大致相符。

图7 最优标度回归模型的残差值(a)和相对误差(b)曲线
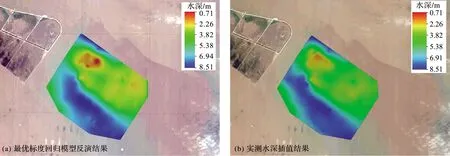
图8 最优标度回归模型水深反演结果对比图
4 结论
本研究利用国产卫星GF5-AHSI高光谱遥感数据,通过一阶微分等多种数据变换方式提高了光谱反射率和水深值的相关性,结合相关分析筛选出波段及其组合作为建模因子,利用单波段比值法、多元线性回归法、最优标度回归法和BP神经网络法建立了水深遥感反演模型,通过比较4种模型的sig值、R2、RMSE和MRE值对反演模型进行了精度评定,研究结果表明:
(1)不同水深点的光谱反射曲线存在微小差异,在近红外波段范围内存在部分反射率陡然增大的点,可能与泥沙含量和水面波动有关;
(2)对数的一阶微分变换能有效提高部分波段处光谱反射率与水深值的相关性,便于筛选建模因子;
(3)单波段比值模型和多元线性回归模型的估测值偏大,最优标度回归模型和BP神经网络模型的水深估测值存在偏小的趋势;
(4)最优标度回归模型的精度和可靠性最高,浅于5 m的水域反演精度略差,绝大部分样本误差优于1 m,适用于横沙滩涂浅水区水深反演。