基于Retinex算法的水下堤坝裂缝检测
2022-07-21陈文静孙远灿
高 欣,陈文静,孙远灿
(黄河水利职业技术学院,河南 开封 475000)
0 引 言
堤坝作为我国农业水利工程的主要设施,一般情况下温度、水压以及梯度等较多因素都会影响到堤坝的使用,导致其出现磨损、裂缝、气蚀、渗透等问题,这些情况都会对堤坝的使用寿命造成威胁,让周围居民陷入危险。在以上情况中,堤坝裂缝发生的频率较高,裂缝一旦存在,就会侵蚀到堤坝的内部,这将会对坝体造成严重的威胁;而水下的裂缝由于受水下环境的复杂性和多变性的影响,直接采集到的坝体图像会出现对比度低、噪声干扰大、亮度不足、偏色以及细节损失等问题,使得裂缝特征信息无法准确检测出来。
图像增强技术是校正图像的主要技术,同时也是水下堤坝裂缝图像检测中重要的技术之一,一直以来倍受人们的关注与研究。目前,图像增强技术发展迅速,已经被广泛地应用到多个领域,如农业、医学、军事、地质研究以及卫星遥感技术等,在水下堤坝裂缝图像的检测技术中也是非常热门。现有的水下裂缝检测算法主要以形态学特征和灰度特征两种方法为基础,包括数学形态学、遗传、神经网络以及模糊逻辑方法等。然而,这些研究中仍需解决下述问题:(1)水下堤坝裂缝图像的边缘提取结果模糊不清,存在伪边缘信息现象;(2)现有的算法在低对比度情况下,得到的特征区域不连续,导致目标检测结果存在不完整性;(3)水中悬浮物会使水下图像噪声增大,水下光照不均匀也会增加图像背景的显著度,使图像在检测中存在大量的背景区域,导致了检测率较低、误报率增高。
本文提出了一种基于自适应阈值分割和Retinex理论的水下堤坝裂缝检测与提取算法,用于检测和提取线性裂缝。主要方法为:(1)多尺度导向滤波Retinex算法:对于边缘位置不清晰、存在较大噪声以及对比度不够的问题,首先实现图像色彩空间的转换,由RGB变为HSV;之后借助导向滤波算法处理中的亮度图像,实现其分量的估算;再通过直方图裁剪、Gamma颜色校正处理和获取照度图像,运用Sigmoid函数对反射图像进行增强,使水下堤坝裂缝图像达到增强的效果。(2)自适应最大类间方差阈值分割算法:对光照背景部分显著度增强导致检测结果中存在大量的背景区域问题,应用自适应最大类间方差阈值分割以及形态学开运算处理方式获取清晰的二值图像,得到骨架图像,同时细化线性裂缝,将其变为单像素宽度,计算白像素的个数和所占区域的面积,从而计算出裂缝的宽度,依据实际摄像机的分辨率大小乘以转换系数便可以得出裂缝的实际尺度值。
1 Retinex算法
大脑皮层以及视网膜共同构成Retinex,从而对人眼形成图像的过程进行模拟。Land是人类视觉的亮度和颜色感知的模型,与物体表面的反射特点存在关联,与入射光的强度没有关系。所以,将入射光从初始图像进行提取,处理获取的场景反射分量是Retinex算法的核心流程。如下式所示:

式中:代表反射图像;代表原始图像;代表照度图像。反射分量可以判定一幅图像的内在性质,也就是要得到的增强图像;而照度分量则主管着图像中像素能达到的动态范围。估算初始图像的照度分量,去除照度分量中光照不均匀的影响,分解出反射图像,以达到改善图像的视觉效果。
根据不同的照度分量估算方法的不同,现有的Retinex算法主要包含以下几种:随机路径Retinex、MsCann’s Retinex、单/多尺度Retinex、中心/环绕Retinex和带颜色恢复的Retinex 算法等。虽然采用上述常规算法也能够起到增强图像的效果,但是因为在将照度图像去除、将反射图像保留的算法应用过程中,使用归一化后直接做反变换,就能够将其中均匀的直流分量去除,在灰度拉伸的过程中无法将一部分特征考虑在内,导致从整体上图像的亮度降低,因此存在局限性,那么增强效果就在色彩和亮度方面的处理上容易出现“光晕伪影”以及偏色问题。
2 多尺度导向滤波Retinex图像增强
2.1 颜色空间转换
根据水下裂缝图像多变性的特点,为避免在后期特征提取中色彩失真会产生不利影响,本设计研究Retinex 图像增强算法,该算法属于多尺度导向滤波的一种。对于HSV颜色空间而言,饱和度、色调以及亮度三者相互独立,而且与人的视觉感知特性相互对应。因此,该颜色空间能够对多分量进行直接操作,避免了RGB颜色空间中对R、G、B三原色的直接操作,这样也不会对原始图像中的色相和饱和度造成不利的影响。通过空间转换的方式处理初始图像(),变为HSV颜色空间中的色调图像IH(,)、饱和度图像IS(,)以及亮度图像IV(,),只需要对亮度图像IV(,)进行计算就可以估算出照度分量。
2.2 以引导滤波为基础的照度分量估计
以Retinex为基础的图像增强算法在增强图像的过程中,对比度比较高的边缘区域经常会出现“光晕伪影”,一部分专家在选择环绕函数时不再使用高斯滤波,而是选择边缘保持的双边滤波。通过这种方式完成对光照分量的估算,这种算法虽然能够在一定程度上改善图像的质量,在应用双边滤波算法完成平滑处理过程中有助于图像细节信息的保留,但是该算法复杂度高,导致耗时较长,降低了执行效率。为了改善以上问题,本文采用能够产生相同效果的导向滤波算法来估算照度分量,导向滤波在运算过程中主要借助于积分图像技术和盒滤波技术完成,应用词算法时的执行效率与滤波窗口的大小之间没有关联,降低了运算的复杂度,所以双边滤波算法在估算照度分量时的效率会更高。

式中:R(,)为对数形式下的反射分量;为导向滤波函数。导向滤波可表示为局部线性模型:

式中:q代表图像I窗口ω中像素处的线性变换灰度值;为窗口ω的中心像素;在窗口ω中系数a和b为常数。这个模型在图像抠图、图像超分辨率重建和图像去雾中也经常应用。局部线性系数a和b通过下式进行求解:

式中:u和σ分别为图像窗口ω中像素的均值和标准差;N为窗口ω中的像素数量;为正则化参数,该参数能够将平滑与边缘得到很好的平衡,正则化参数越大证明平滑性越好,其边缘的保持性也就越差。为了保证稳定的q,就要做平均值化处理,将式(3)的线性模型应用到整幅图像,得到导向滤波函数,如下式:

2.3 校正照度分量图像
借助照度估算的处理方式处理输入图像就能够获得相应的照度图形。本文采用直方图方法进行截取,将两端位置的像素局部进行截取,再将剩余的图像像素压缩到[0,1]的范围内,并选择应用优化后的Gamma校正算法完成校正,通过线性拉伸的方式完成相关计算,从而获取照度图像。
优化后的Gamma校正为:

式中:是原像素值;()表示输出值;是控制参数。不同的代表校正函数存在区别,随着值不断变小,针对整体亮度不够的图像而言效果更好。
2.4 增强反射分量图像
将原始图像与照度图像进行差运算便可得到反射分量图像。反射分量图像含有图像的细节信息,增强反射分量图像对整个图像的增强效果非常重要,再通过对数变换处理后就会压缩图像的灰度范围,亮度也会有一定程度的降低,所以需要对其进行增强处理。Sigmoid函数是一种常见的S型函数,又称S型生长曲线,由于具有单增以及反函数单增等性质,被广泛应用于图像增强中。为了提升图像的亮度与动态范围,本课题选择应用优化之后的自适应权值Sigmoid函数增强反射分量图像。如下所示为相关定义:

式中:代表权重系数,能够对增强的程度进行调整;表示反射图像的亮度,由于反射分量图像相对应的亮度值包含在所属范围之内,所以会有负值出现的可能。随着值的增大,增强反射分量图像的作用就会更加明显。
2.5 颜色空间恢复
由于图像增强算法对噪声较为敏感,在实际增强中容易产生颜色失真的情况。为了避免这一情况发生,本文通过颜色空间转换的方法,将颜色空间由(,)转换为(,),从而恢复颜色空间,即:

式中:为增益参数;用于调节彩色整体亮度;用于调节增强处理后图像色彩所占的比重;C(,)为颜色恢复函数;(,)表示最终获得的反射分量增强图像。
算法提出的过程如下:(1)转换颜色空间,从RGB变成HSV;(2)对原始图像取对数处理;(3)利用导向滤波算法,将进行对数运算处理后的图像进行操作估算,从而获得相对应的照度分量图像;(4)借助直方图截取方式,将上一步骤中照度分量图形两侧像素的1%全部去除,随后用改进的Gamma函数对图像进行校正;(5)把照度分量以及初始图像进行求差运算,从而得到反射图像;(6)应用函数Sigmoid,从整体上将反射分量图像的亮度进一步提高;(7)通过指数化处理,实现颜色空间的转换,再将HSV变为RGB颜色空间,同时将亮度提高之后输出图形。
2.6 实验结果与分析
为检测本文算法的增强效果,分别选择存在泥土的、暗光的、进行弱化之后的和高曝光的水下堤坝裂缝图形作为实验目标,完成图像增强实验。为了能够量化地评价图像增强质量效果,本文采用能够检测图像亮度的均值与衡量图像对比度的标准差以及具备评价图像细节信息的熵对图像进行量化评价。
为了证实本文算法的优越性,本文采用了三种常用的水下图像增强算法进行比较。通过实验可以得出,采用MSR算法、Frankle-McCann算法、MSRCR算法、本文算法对水下图像进行增强处理后图像的质量都有了显著的提高。从直观来看,图1~图4中,采用Frankle-McCann算法时增强强度不够,具有较小的对比度,而且针对细节而言增强效果更差;应用MSRCR和MSR算法时,则会发生过正常情况,而且特别可能会发生偏色,在边缘细节的增强效果较差,例如在一些亮度高的图像区域容易出现“光晕伪影”,这对以后的图像检测效果会产生较大的影响;相比之下,本文算法增强效果更加显著。从客观来看,表1~表4中,图像质量客观评价标准中本文算法的均值、标准差、熵值都有明显增加。由此证明,本文算法不仅可以提升图像的亮度,增强图像的对比度,图像的细节信息也能很好地呈现,避免了高亮度区域增强后出现的颜色失真与“光晕伪影”的情况,水下裂缝图像增强效果最为明显。
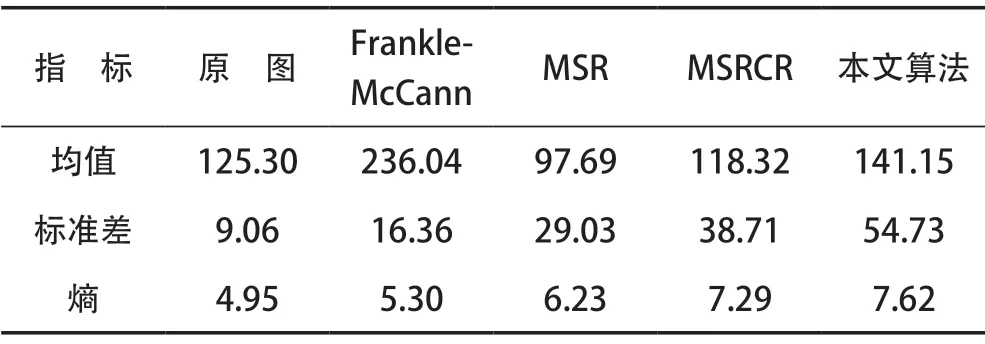
表1 带有泥土图像质量客观评价标准
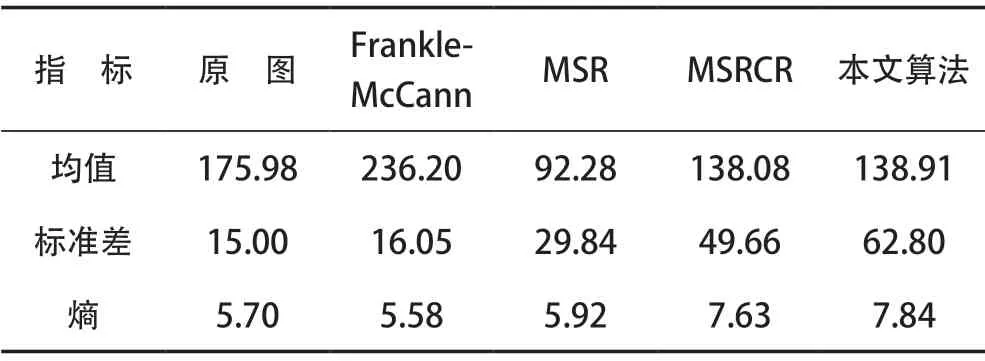
表2 弱化图像质量客观评价标准

表3 暗光图像质量客观评价标准
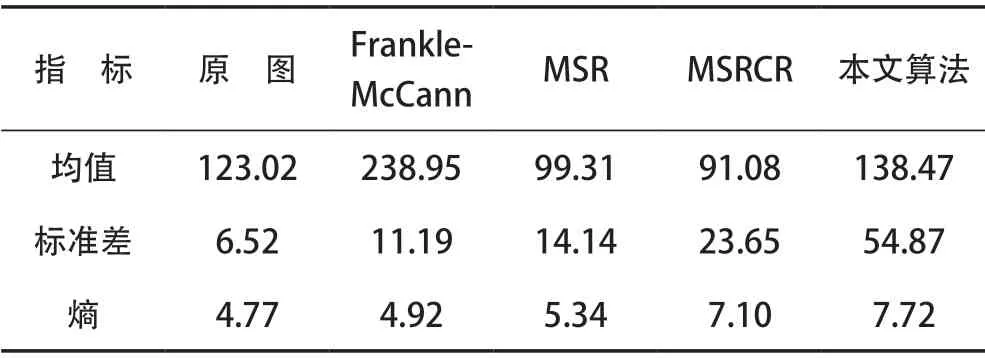
表4 曝光度高的图像质量客观评价标准
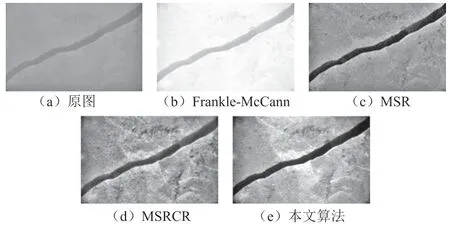
图1 带有泥土图像增强算法效果
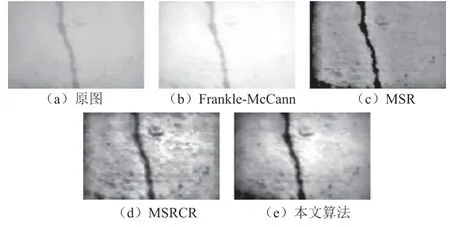
图2 弱化图像增强算法效果
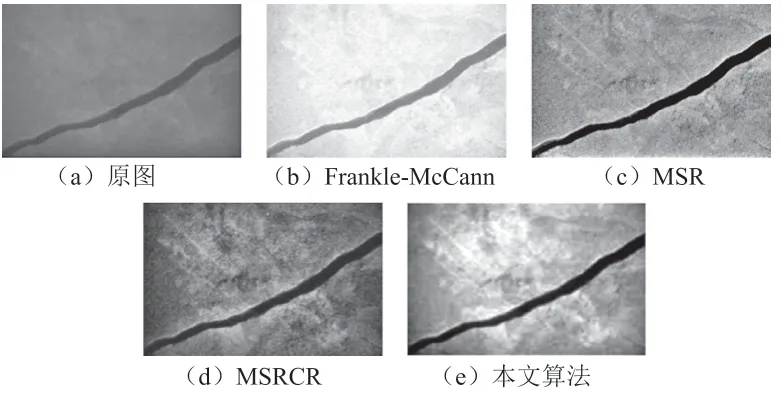
图3 暗光图像增强算法效果

图4 曝光度高的图像增强算法效果
3 水下裂缝图像特征提取
因为水下图像具有较大噪声,而且对比度不强,受到不均匀的光照导致图像的特征提取也很困难。如果选择应用常规的二值化处理及边缘检测方式通常会携带较多的背景信息。针对该问题,本课题选择应用自适应最大类间方差阈值分割的算法,以其灰度特点作为依据完成目标和背景两部分的划分;在这两类的类间方差达到极限值的情况下能够获取最好的二值化阈值。随后再对该图像做形态学处理,采用开运算去除突出的噪点,效果显著。方差的计算公式为:

式中:代表在图像像素中背景所占比值,代表目标所占比值;代表背景像素灰度均值,代表目标像素灰度均值。当类间方差值最大时,从个灰度级遍历,从而使得对于某个值背景和前景都具有最大的方差值,就能够获取分割阈值的最优值。实验结果如图5所示。

图5 本文增强算法最大类间方差开运算效果
由图5可知,采用开运算方法对水下线性裂缝图像进行处理,不仅能使分割后的裂缝得到较好的修复,也让目标物的大小得到很好的保持。
4 水下裂缝特征参数的提取
将得到的二值图像进行特征参数提取,如图6所示,图中白色区域为目标裂缝,黑色区域为图像背景。通过无限大骨架提取方法对线性裂缝进行提取便可估算出线性裂缝的长度,再求取白色像素所占的区域面积,进而便可求出裂缝的宽度。
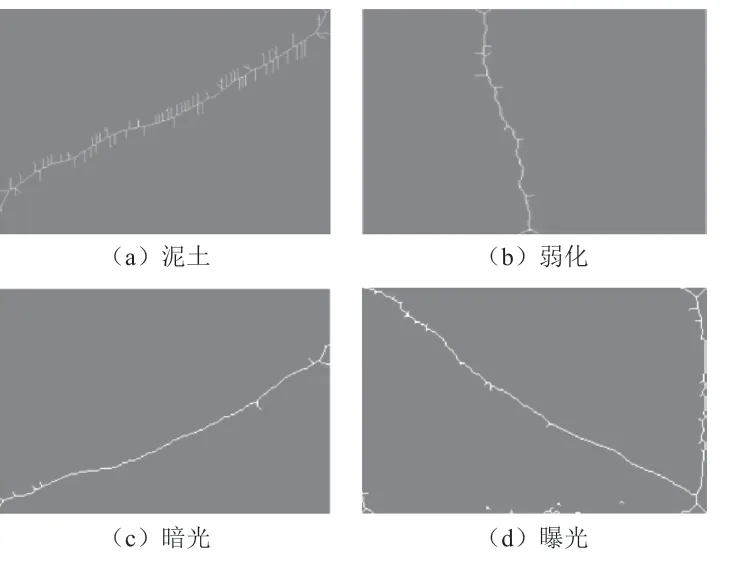
图6 骨架提取
由图6可以看出,将经过最大类间方差开运算的堤坝裂缝效果图进行无限大的骨架提取后,线性裂缝便细化为单像素宽。由此便可估算出裂缝的长度、宽度、面积等值,再依据实际摄像机的分辨率大小乘以转换系数就可以求得裂缝的实际参数值。表5所列为提取的上述图像的参数数据。

表5 图6参数计算结果(单位:像素)
表5中,area1表示目标裂缝的的面积值,area2表示无限骨架提取后单像素线性裂缝的面积值,width表示裂缝的宽度值。由于通过上述方法求取的值是用像素点来表示的,因此在标定实际图像时要求以摄像机的分辨率作为参考,并获取图像内部不同像素点长度的实际值,得到转换系数,通过计算获取的像素点数量与乘积,就能够得到实际的裂缝长度、宽度以及面积。即:实际线性裂缝长度=num(裂缝像素个数)×(转换系数)。
5 结 语
本文以水下堤坝裂缝图像作为研究目标,深入分析图像的增强、检测以及提取算法,提出了一种新的检测方法。通常情况下,水下堤坝裂缝图像的边缘位置不够清晰,存在噪声较多且分辨率和对比度不够等一系列问题。首先在预处理阶段为了获取更好的效果,选择应用Retinex图像增强算法;之后为了使裂缝二值图像更加清楚,选择应用最大类间方差阈值分割以及形态学进行处理;经过相关处理之后最终获得了与图像相关的裂缝特征参数数据。通过实验说明,应用以上算法对于复杂度较高的水下环境中的裂缝能够进行有效检测,同时还能够更加准确地提取相关参数值。本文方法能有效地检测出堤坝的裂缝,并且能够提供裂缝的参数信息,对于我国堤坝安全防治而言具有较大价值。
