机车协同安防机器人系统设计
2022-07-19刘云平
梁 越,刘云平
(南京信息工程大学,江苏 南京 210000)
目前中国传统的国家安全系统以“人防+物防”的方法来完成,但是由于中国社会上老龄化趋势日益严重、劳动力成本持续高涨、国家安全人才流失率持续增加等问题,它已不适应目前的社会发展趋势[1]。同时,由于传统安防产业面临着信息孤岛的现状,在查询数据时需要人为过滤,而无法直接与云端的大数据分析进行自动交流,极大地降低了用户的效率;同时也只能做出事后反应,并没有事前主动出击、自主防范的能力[2]。机车协同安防机器人应运而生,不仅解决了在复杂场景下工作的技术难题,还提高了巡检全面性和稳定性,有利于安防事业的发展。
1 整体设计
随着城市的发展和扩张,安防的范围和难度不断增长,同时人口老龄化情况日益严重、劳动力成本飙升,如今安防行业的成本居高不下,社会也对安防系统提出了更高的要求,用安防机器人代替传统安防系统势在必行[3]。为了提升安防效率和性能,本文介绍机车协同安防机器人的设计与应用,实物如图1 所示。

图1 机车协同安防机器人实物图
机器人具有在多种环境下工作的能力,不仅能在白天针对相关安全问题进行巡逻,在夜间也可以利用事件相机在黑暗的环境中高效提取图像。在机器人定位方面,应用事件相机装配有视觉与惯导单元相结合的里程计、用于环境感知的激光雷达,实现机器人对周围环境的实时监测,当小车视野受限或者需要无人机去执行某些特定的拍照任务时,无人机会自动起飞进行拍摄任务,扩大了检测的范围;同时由于无人机续航时间有限,无人车上安装了无线充电装置,给无人机充电续航,保证了系统的持续运作。
结合安防行业的实际需求,安防机器人除了具有基础的定位和巡检功能,还具有人物识别、测速、车辆违章检测、烟雾报警等功能,进一步拓展了安防能力[4]。
2 硬件设计
本产品硬件部分如图2 所示,机器人系统主要由无人机以及无人车组成,并搭载多种传感器采集数据。
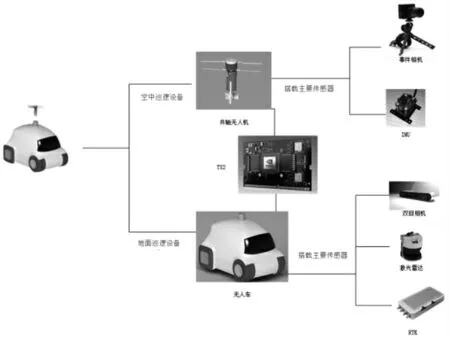
图2 硬件结构图
工业机器人系统主要由无人车和无人机二部分构成,其中无人机与无人车间用P900 数传模块实现了数据通信,具备高效率、少延迟的优点,并且对数据通讯的稳定性较强,并可提供良好的噪声系数抑制,出色的抗干扰性能和快速平稳的频率合成。
无人机上搭载事件相机和惯性导航系统。事件相机是一个新型的视觉感应器,通过测量每个像素点光照强度的改变来生成“事件”,拥有低延时、高动态范围的技术先进特点[5]。惯性导航控制系统为导航参数解算控制系统,以陀螺旋转和加速度仪为主要敏感元件。系统中通过利用陀螺旋转的输出形成导航坐标系,然后再利用加速度仪的输出计算出目标物在坐标系中的速度和位移。系统具备隐藏好,抗干扰能力强,数值持续性好且噪音较少的优势,而且短期精确度和稳定性良好。
无人车上搭载了RTK 定位模块、双目相机和激光雷达。选用的SKY2-机载RTK 定位模块具有高动态接收机板卡,在高速状态下能达到厘米级的差分定位结果,使整个产品具备更好的精度和更好的安全性与稳定性。激光雷达是发送激光能量束,以检测目标位移,速率等特征物理量的雷达控制系统。由于雷达在连续工作时不受有源干扰影响,所得到的数值更加精确,比实时好,而且激光雷达安装简单,适宜用作小型环境感应控制系统中的检测器。
3 软件设计
3.1 协同搜索算法
对于无人机和无人汽车的协同搜索采用波门跟踪算法[6],通常包括以下3 种情况:
(1)没有要求的目标时,系统处于等待模式。
(2)当目标出现变化并在附近波门内动时,系统保持跟踪模式。
(3)当目标从波门消失时,波门就会展开全局搜索。
无人车在运动过程中,运动轨迹必须服从某一确定的函数关系。设无人车在前a 帧图象中的中心位置坐标为(xk,yk),则k 的取值范围为(0,1,2,3...a)。无人车运动的x 坐标推导和y 坐标推导很相似。假设x 的最符合要求的二次函数应该用下式表达

可得a 个点的误差方差:

使用最小二乘法来让误差平方达到最小化,可得:

将式(3)带入式(1)便可以算出下一帧中无人车位于图片中的位置。
3.2 多传感器融合
多个传感器融合是指采用多个传感器为同一载体提供准确位置信息。为了实现合理的传感器数据融合,必须充分考虑这几个传感器之间的输出延时差。对于事件相机与IMU 相结合的传感器系统而言,视觉数据延时通常难以准确估算,使用扩展卡尔曼滤波器(EKF)创建了一种视觉惯性系统,它可以有效融合IMU 和视觉数据,提供准确丰富的运动和环境结构信息。传感器融合原理如图3 所示。

图3 传感器融合原理
4 数传模块
无人车与无人机之间的数据通讯利用P900 数传模块得以实现。P900 以其极小的封装和适应性设计,成为对空间和成本有要求的终极应用。P900 具有稳定可靠,高速率,低延时,数据通讯安全性强的优势。除此之外,P900 能提供极佳的噪声系数控制,卓越的抗干扰性能以及迅捷稳定的频率合成。P900 在目前国内无人机、应急语音通讯行业具有非常大的应用前景。其实物图如图4 所示。
图4 P900 数传模块实物图
5 上位机监控
上位机监控系统主要用于用户对机器人状态、环境状况以及摄像头相关图像的查看,以便机器人对用户输出有关安防隐患信息。该界面采用QT5 中的Label、Push Button、Combo Box 等控件,涉及到机器人巡检的主要任务。当机器人处于巡检任务模式时,用户可以实时查看安防车的位置坐标、剩余电量、信号强弱以及无人机的飞行高度,并且控制无人机的运动路径,同时无人机将拍摄到的画面实时传输到用户屏幕上。机器人巡检操作界面如图5 所示。

图5 机器人巡检操作界面
6 结束语
安防机器人已经完成了现场部署和运行,实际使用过程中可以给机器人制定巡检任务,机器人按要求完成该路线的巡逻后,将巡视的结果上传到上位机监控部分,供使用者参考。相比于传统的安防方式,使用本文介绍的机器人提高了安防的全面性和持续性,并能实现在复杂天气环境下的工作任务。
