无人机任务载荷配置与应用策略研究
2022-07-19孙辉郭忠诚吉彩妮宁娟
孙辉,郭忠诚,吉彩妮,宁娟
1.贵州贵飞飞机设计研究院有限公司
2.中航贵州飞机有限责任公司
任务载荷作为无人机系统的重要组成部分,在满足特定场景的应用需求中发挥了决定性作用。多元化任务载荷配置与合理的应用策略共同决定了无人机系统执行任务的效能。
任务载荷由无人机搭载,在飞行任务过程中可获取数据信息。针对特定的任务需求,操作人员应结合应用场景以及影响无人机飞行的因素,合理科学地选用多元化任务载荷,仅以单架次飞行,便能获取多源目标信息。而多元化任务载荷形成的组合体,通过统一的应用策略部署,提高了无人机的作业效率,对连续、快速获取精确数据具有重要意义。
典型任务载荷的技术特性
可见光摄像机的技术特性
可见光摄像机以光电耦合器件或互补金属氧化物半导体为核心部件,在预定的目标区域上空搜索目标,获取目标反射的能量。摄像机的变焦距镜头将目标成像于探测器靶面上,通过光电转换,目标亮度信号转化为与自身成比例的光电信号,光电信号经过扫描处理后,可见光摄像机最终输出模拟视频信号或数字视频信号。摄像机采用自动/手动方式搜索目标,自动跟踪和标定目标坐标,实时输出视频,可完成广角侦察、监视、现场作业效果评估等任务。
红外热成像仪的技术特性
红外热成像仪利用红外探测器件,接收被测目标的红外辐射能量,并将红外辐射能转换成电信号,电信号经放大处理,转换成标准视频信号。由于发热物体辐射红外线,无须可见光照射,就能被红外热成像仪探测。因此,红外热成像仪以无源方式工作,属被动侦察设备,隐蔽性好,抗干扰能力强,能较好地透过战场硝烟或薄雾,揭示伪装,探测到热泄露或出现热异常的地下目标,可全天时工作,承担远纵深目标侦察、战场监视、目标定位、毁伤评估等任务,在森林防火、应急救援及电力线巡检等民用领域广泛应用。
面阵数码相机的技术特性
面阵数码相机使用光电耦合器件或互补金属氧化物半导体来记载图像信息。作为传统光学照相机的升级设备,面阵数码相机解决了光学照相机实时性差、信息回收处理周期长等问题,能够在昼间无雨条件下,采用单拍、连拍、定点起拍、等距/等时曝光等工作模式,对目标区域进行临空垂直拍照和倾斜拍照,实时生成目标图像,具有覆盖面积广、分辨率高、情报信息处理周期短、测量及目标定位精度高、情报信息分发快等优点,在军事侦察和测绘任务中发挥了重要作用。
合成孔径雷达的技术特性
合成孔径雷达由无人机搭载。在飞行任务过程中,处于不同位置的小口径雷达单元接收雷达回波信号,并对回波信号进行合成处理。通过阵列组合,小口径雷达单元能够等效为大口径天线,有效提高方位向分辨率。合成孔径雷达具有全天时全天候工作能力,能够穿透云雾、植被和树叶,同时具有一定的移动目标探测能力,通常采用普查、详查及聚束模式等多种模式执行任务,广泛应用于地形测绘、地质研究、海洋研究和监测、军事侦察、减灾防灾等领域。
多光谱/高光谱相机的技术特性
多光谱/高光谱相机运用的光谱成像技术是指,相机内部的分光装置将地物目标反射或辐射的全波段或宽波段的光信号分解成若干个特定窄带波段光束,特定窄带波段光束分别在相应探测器上成像,最终形成不同光谱波段的图像。由于不同地物的反射光谱特性及辐射特性存在差异,多光谱/高光谱相机从而可获取目标侦察与识别图像。
激光雷达的技术特性
激光雷达以激光作为主动探测源,接收目标对激光信号的反射及散射回波来测量目标的方位、距离及目标表面特性,从而得到多层次、高精度的目标原始扫描数据。原始扫描数据经过解码分类、数据检查、灰度映射、坐标转换及坐标解算后,用户可以实时获取各种格式、含有世界标准时间(UTC时间)、坐标信息、回波层次信息和反射强度信息的点云数据文件。在后续处理中,综合数据处理系统将点云数据文件与其他影像数据进行融合,得到更精确的目标测量信息。由于激光雷达采用激光进行主动式、非接触测量,具有单色性好、方向性强、能量高、光束窄等特点,实现了高精度测量。
典型任务载荷的用途
在不同场景中,典型任务载荷的主要用途如表1所述。
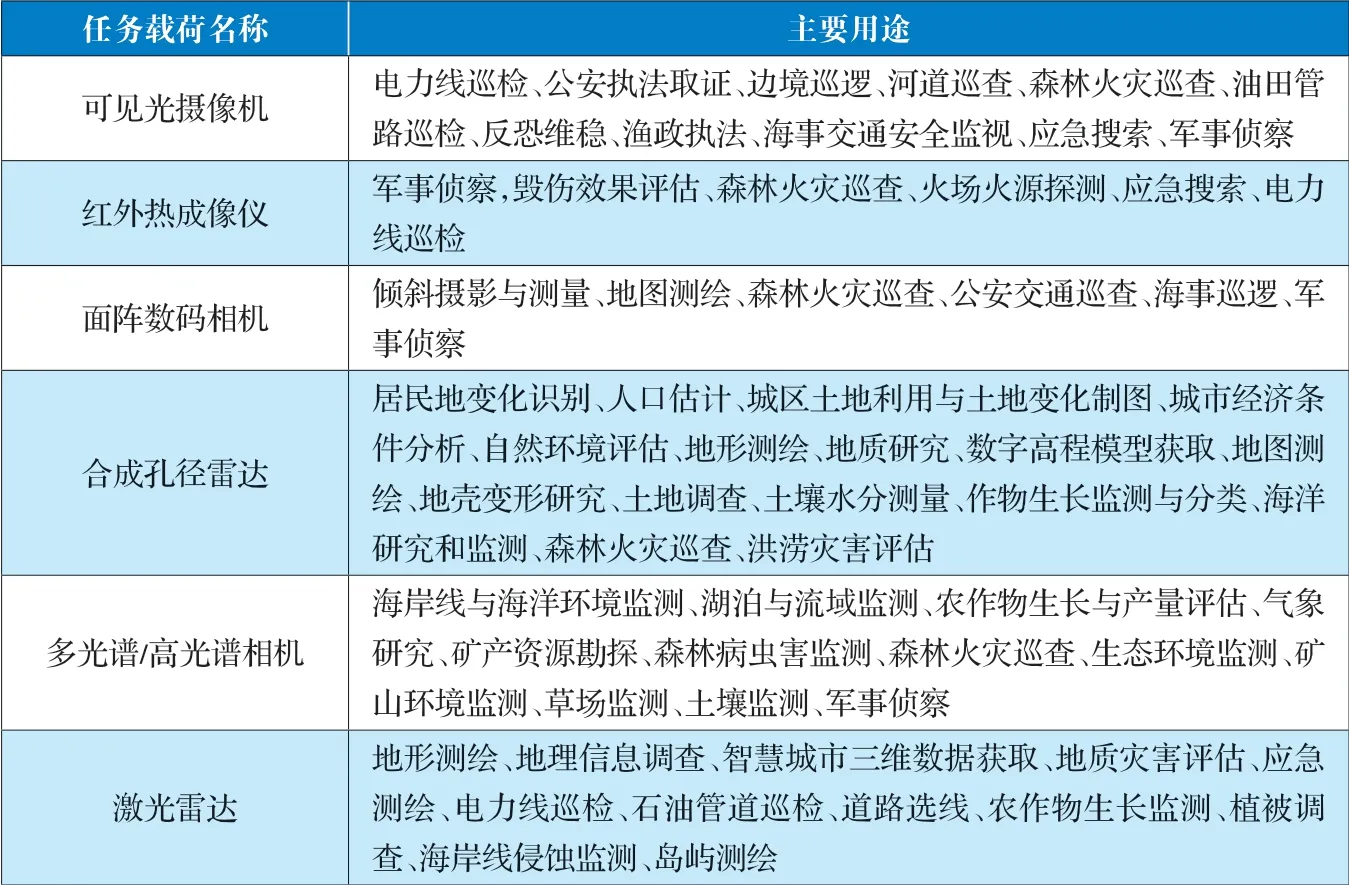
表1 典型任务载荷的主要用途。
适用于典型应用场景的任务载荷配置
用于电力线巡检的无人机任务载荷
巡检无人机在第一时间为电网调度、防灾减灾和设备状态巡检提供真实且全面的现场资料。无人机搭载合适的任务载荷对输电线路进行高精度巡检,以检查导线和避雷线的断股故障,铁塔和金具的状态,输电线路下面的树木生长状况,导线覆冰情况,低零值绝缘子故障等,解决人员巡线班组在地面巡检面临的巡检距离远和视场小的难题,以及有人直升机巡检费用高、安全性差等问题。
目前,用于电力线巡检的无人机任务载荷主要有可见光摄像机、红外热成像仪、数码相机、全光谱摄像机及激光雷达等设备。这些任务载荷的主要用途、可检查的缺陷类型及使用时机如表2所述。
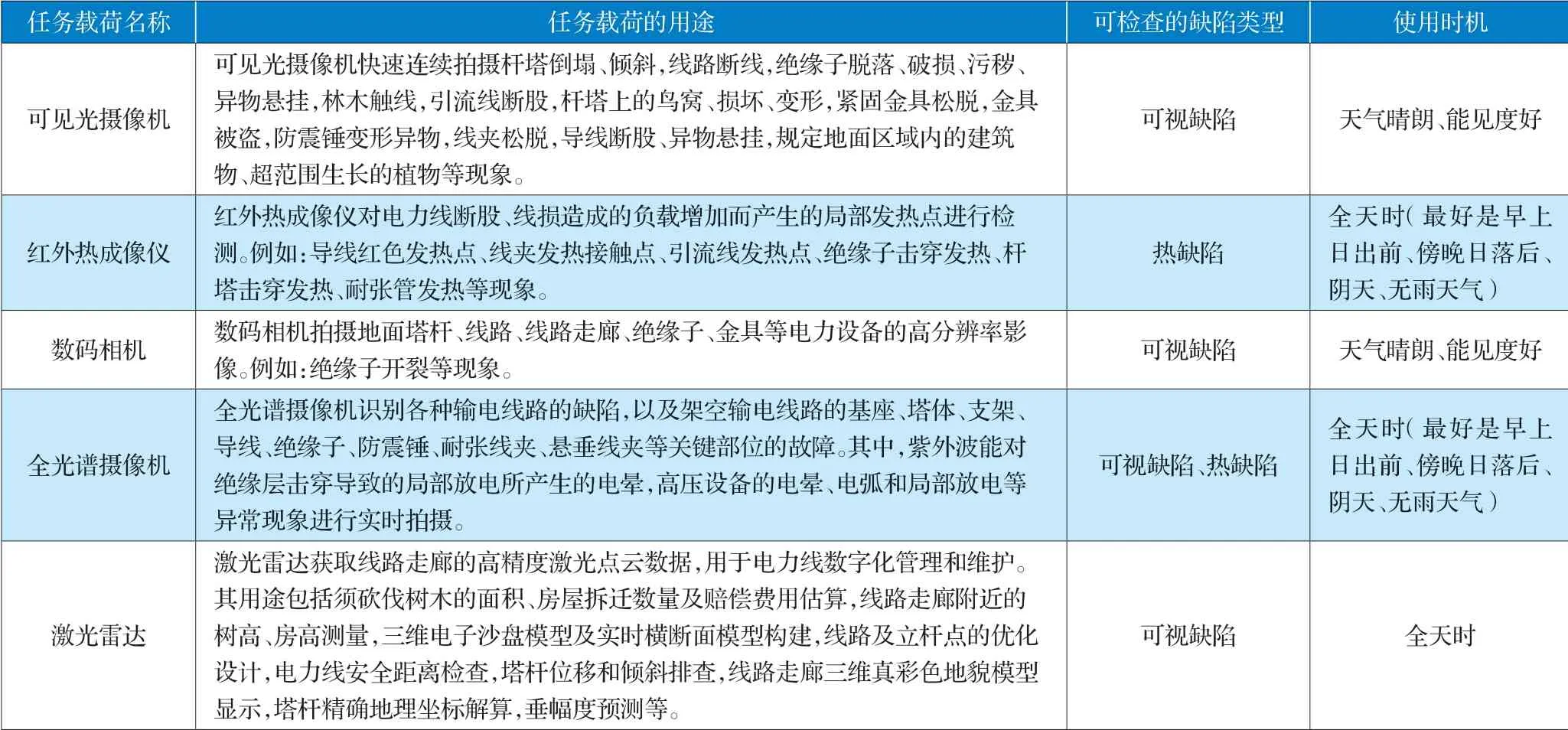
表2 用于电力线巡检的无人机任务载荷类型、用途、可检查的缺陷类型和使用时机。
在实际工程应用中,任务规划人员应全面综合考虑无人机的特性、空间环境、任务设备的性能指标、任务设备的用电特性、现有巡检手段等因素,才能实现技术优势互补。例如,红外热成像仪具有探测灵敏度高、非接触等优势,但易受目标辐射率、外界光线等干扰。无人机配置具有高灵敏度的紫外成像仪,能够在飞行任务过程中检测高压设备的电晕、电弧和局部放电现象,从而评估电力设备的绝缘状况并及时发现绝缘设备的缺陷。紫外成像仪抗干扰能力强,不易受日光的影响和检测时间的限制,可弥补红外技术的不足。
中航贵州飞机有限责任公司根据中国南方电网贵州电网公司的需求,提出了固定翼无人机与多旋翼无人机组合的电力线巡检模式。其中,固定翼无人机配置有可见光摄像机、红外热成像仪、激光雷达及数码相机等任务载荷,实现了输电线路及电力线路走廊的快速巡检;多旋翼无人机配置了紫外成像仪和摄照一体机,实现了特定输电线路区间的故障检测。
用于应急测绘的无人机任务载荷系统
应急测绘无人机具有响应速度快、环境适应能力强、机动灵活等特点。作为应急测绘无人机的核心组成部分,任务载荷可高效获取突发事件现场的高分辨率、高精度信息,能够满足“第一时间”获取现场信息的需求,在应急测绘任务中发挥了重要作用。
目前,应急测绘无人机的任务载荷系统包括航测面阵数码相机、轻小型合成孔径雷达、光电/红外吊舱、激光雷达、测姿定位系统和三轴稳定平台等设备。
1.航测面阵数码相机的用途
航测面阵数码相机适用于白天、能见度良好的环境,可快速获取突发事件现场的遥感图像,是应急测绘无人机系统的主力传感器。
2.轻小型合成孔径雷达的用途
轻小型合成孔径雷达可以对突发事件重点区域的现场进行二维高分辨率多极化实时成像,获取目标的后向散射系数和极化特性信息。该型雷达不受能见度和天气条件的限制,拥有全天时、全天候作业能力,能在夜间或低能见度的环境中获取遥感信息,可穿透植被获取地表信息。轻小型合成孔径雷达具备单极化、全极化和极化干涉等多种模式。其中,单极化模式可获取灰度影像,全极化模式可获取RGB伪彩色影像,极化干涉模式可获取地面高程信息。
3.光电/红外吊舱的用途
无人机机载光电/红外吊舱可全天时、全天候工作,获取突发事件现场的信息。无人机获取的视频信息由视距链路或超视距链路实时传输给地面应急测绘调度系统,满足应急指挥决策的需求。
4.激光雷达的用途
激光雷达可在空中多个不同位置对突发事件重点区域的现场进行扫描,获取目标的点云数据信息,特别适合在无云雾天气条件下,获取震后建筑物倒塌、泥石流滑坡和塌方等灾害现场的点云数据。测绘内业人员利用数据处理技术,能够快速生成灾害现场的三维空间模型,计算土方工程量,为减灾防灾决策提供量化数字依据。

图1 航测面阵数码相机。
5.测姿定位系统的主要功能
测姿定位系统(POS)集成了全球卫星导航系统和惯性导航系统的优势。
6.三轴稳定平台的主要功能
三轴稳定平台为航测面阵数码相机、轻小型合成孔径雷达等任务载荷提供安装基准平台。偏流补偿能改善图像的旋角偏差,规避天气变化和无人机振动对任务载荷造成的位移影响。三轴稳定平台能提高任务载荷的换装效率,加强任务载荷的环境适应性,提升航测数据的质量和精度。
图2 三轴稳定平台。
任务载荷组合系统的应用策略
主被动多传感器组合宽角成像系统的应用策略
中航贵州飞机有限责任公司与其他单位联合研制的APCAI-100型主被动多传感器组合宽角成像系统配装在“鹞鹰”无人机上,是一种多功能测绘任务载荷系统,由CKAC-200型组合宽角航摄仪、光电/红外吊舱、激光雷达和测姿定位系统等设备组成。
1.应用策略的特点
该系统采用多元化任务载荷配置,可全天时、全天候工作获取高分辨率影像,以测姿定位系统提供的位置信息作为测量基准,采集三维地理坐标。一架次飞行便能获取高分辨率图像、激光点云数据、高清影像、红外视频影像等应急测绘原始数据,有效提升了系统应对地震、地质灾害、洪水、森林草地火灾等灾情的能力。
2.应急测绘任务的流程
无人机搭载主被动多传感器组合宽角成像系统执行应急测绘任务包括应急测绘任务接受,任务准备、任务区域航摄作业和返航,数据信息拷贝三个阶段,详见图3。

图3 无人机搭载主被动多传感器组合宽角成像系统执行应急测绘任务的流程图。
第1步:操作人员接到应急测绘任务后,收集突发事件所在地区的地形、天气条件和任务作业时间等信息,制订包括航线规划、作业区域规划、航摄作业参数设置等内容在内的航摄作业计划。
第2步:根据航摄作业计划,操作人员对所有任务载荷设备进行飞行前动态、静态检测,并完成航摄作业参数装订。
第3步:无人机飞抵突发事件现场,根据现场天气条件及任务时间窗口,选择合适的传感器采集重点区域的现场信息,并通过数据链路将获取的信息实时传输给后方指挥中心。
第4步:指挥人员根据无人机提供的信息,判断是否调整航摄作业计划。无人机依据最终确定的航摄作业计划,利用传感器获取目标区域的信息。在作业过程中,无人机随时根据任务需求切换传感器,来获取和回传数据。
第5步:无人机完成应急测绘任务后返航。当无人机着陆后,操作人员将无人机采集的数据信息拷贝至综合数据处理系统并处理数据,为后续应急救援工作提供决策依据。
光电吊舱的应用策略
目前,多数巡检无人机系统都配置了光电吊舱。光电吊舱集成了红外热成像仪、CCD摄像机、激光测距仪和数码相机等多种设备,可以实现全天时多模式作业,获取多源传感器信息。光电吊舱采用陀螺增稳结构,有效提高了影像质量。
1.应用策略的特点

图4 光电吊舱。
光电吊舱集成了数码相机和CCD摄像机,可有效解决宽覆盖探测与高分辨率成像之间的矛盾,极大提升无人机的巡检效率和细节检查能力。部分巡检无人机系统除配备光电吊舱外,还配置了独立的数码相机,不仅可以使用光电吊舱集成的数码相机倾斜拍摄目标,还能使用独立的数码相机临空垂直拍摄目标,巡检效率大幅提升。同时,两种数码相机在一定程度上互为备份,若其中一者发生故障,另一者仍能独立工作,降低了飞行架次失效的概率。
2.巡检任务的流程
巡检任务包括光电吊舱起飞前地面检测、任务区域巡检及无人机返航三个阶段。
第1步:无人机起飞前,光电吊舱上电。操作人员通过地面控制站发送控制指令及参数信息,检查光电吊舱中各型传感器的工作状态。操作人员确认光电吊舱工作正常后,光电吊舱下电,等待无人机起飞。
第2步:无人机起飞,到达任务区域后,光电吊舱上电,操作人员通过数据链路向光电吊舱发送控制指令。根据天气条件及任务时间窗口,操作人员选择合适的任务传感器,并控制光电吊舱的方位、俯仰轴运动方向。光电吊舱快速对大范围任务区域进行拍摄。操作人员根据数据链路传回的影像及数码照片,对目标进行检查。同时,针对特定目标,操作人员选用手动搜寻模式或自动跟随模式,实现光电吊舱视场对目标的跟随,通过控制当前所使用传感器的镜头焦距,实现目标细节识别。
第3步:巡检任务完成后,光电吊舱下电,无人机返航。

结束语
随着制造、控制、通信、导航、传感器和动力等共性技术的不断发展,无人机的安全性、操控性、可靠性等方面取得了长足进步。在军民融合战略支撑下,无人机将在更多领域广泛应用。无人机制造商应该深度挖掘场景应用的高层次需求,提升无人机系统在应用场景中的适应性。