分布式驱动电动汽车动力学建模仿真与验证
2022-07-18康正泉郭毅锋
康正泉,郭毅锋
(1.广西科技大学电气电子与计算机科学学院,广西柳州,545000;2.成都大学机械工程学院,四川成都,610000)
0 引言
汽车产业推动着社会经济的发展,但是也给人类带来了一系列的问题如化石燃料的过度开采,能源储量日益减少,空气质量也随着汽车尾气的排放增加而遭受巨大的挑战[1]。为了拯救我们生活的环境,汽车产业必须要实现快速以及转型的发展,随着能源日益匮乏和大气环境污染的日益加深,由传统汽车向新能源汽的转型显得尤为重要[2]。为了充分发挥电动汽车的能源利用率,各国的科研人员研究出多种提高电动汽车行驶稳定性能、安全性、能源利用效率的方案[3]。采用能量管理控制策略,采用减少能量传递传动方式等,这些技术的提出使得电动汽车工业发展迈上了一个新的台阶[4]。纯电动汽车根据驱动源分为集中式驱动和分布式,动力源为分布式驱动的电动汽车,可以将整个电动机结构安装在驱动轮辋中,这种将动力源直接向驱动源转移,为驾驶者提供更好地加速特性、转矩特性、续航里程以及操纵感[5]。因此,如何利用分布式驱动技术的特点来提高车辆行驶稳定性成为研究院所以及各大高校研究的重点[6]。分布式驱动电动车辆相比于集中式驱动具有更大的优势,但也出现了新的问题。因为四轮独立可控转矩,出现了转矩分配、转向稳定性、电子差速等问题[7]。以上问题需要有良好的控制策略,但是需要更为准确车辆动力学模型来作为基础[8]。本文通过对simulink的十四自由度车辆仿真模型,该车辆模型具有良好的运动特性[9]。
1 车辆力学建模方法概述
我们需将车辆动力学进行线性化处理和合理的假设来进行相关条件的约束,对于早期的车辆动力学建模来说,二自由度车辆建模建立,通过求解简单的二元微分方程来获得车辆的状态。车辆动力学建模现在主要分为三种:人工建模法、计算机自动建模法、图形建模法。
1.1 人工建模法
研究者经过分析和实验后,对车辆系统有了主观和客观的认知,进行对车辆系统完成仿真和计算。这种方法通过建立车辆动力学微分方程,通过数值或者差分将微分方程组变为离散的差分方程组,通过计算机语言来转化成可用程序。
1.2 计算机自动建模
计算机自动建模是大家使用较为普遍和流行的建模方式。仿真计算和建模分析都是有计算机软件自动完成,这种建模方式一般采用多体动力学软件进行建模与分析计算。优点是效率高、直观性好、精度高等特点。
1.3 图形化建模
图形化建模通过运动学分析,推导车辆运动学方程,通过专业的软件(TruckSim、CarSim、MATLAB/Simulink等)来完成建模计算。需要建立较为准确以及对车辆动力学模型有较为深入的研究,借助图形化建模,将自由度高、非线性化程度更高以及模型复杂度更高的模型给搭建出来,可以建立更符合车辆运动状态的特性。
2 车辆动力学建模
2.1 车身模型
我们来分析车辆外作用力和外力矩,通过建立车身的多自由度较为全面描述车身的运动,其中车身xoy平面运动如图1所示。

图1 车辆xoy运动
自由度运动微分方程:
(1)车身纵向运动微分方程:

式中FR等于车轮阻力加上车辆阻力

(2)车身侧向运动微分方程:

(3)车身横摆运动微分方程:

(4)车身垂向运动微分方程:

(5)车身倾侧运动微分方程:

(6)车身俯仰运动微分方程:

式中(1)到(6)式中,m为整车的装备质量,mb为车身质量,fr为车轮滚动系数,αgrade为车辆爬坡度,Li代表各轴到质心的纵向距离,Fzsij代表各轴的垂向力,Fxij和Fyij代表车身的纵向力及侧向力。
2.2 悬架模型
车辆侧倾运动和俯仰运动导致车辆产生动态悬架力,Cr和Cp分别为车辆的倾侧与俯仰中心侧倾角为φ,俯仰角为θ,各车轮垂向位移为Zwij,各轴的悬架垂向位移为Zzsij。则由几何关系可得:左侧悬架侧倾变形量为Bsinϕ/2,右侧悬架变形量为−Bsinϕ/2,前轴俯仰变形量为L1sinθ,后轴俯仰变形量为−L1sinθ,如图2所示。
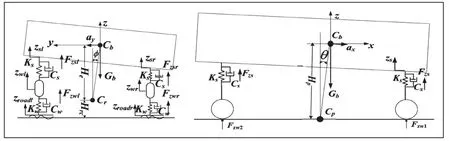
图2 车辆俯仰运动
由微分方程可知,车身动态悬架力为:

通过并联系统可得到车轮动态垂向力:

我们计算的得到静态力和动态力,实际的悬架力和车轮垂向力由以下式子计算得到:

2.3 车轮模型
车轮作为与地面直接接触产生作用力的部件,对于整车行驶非常的重要,我们要对其动力学进行分析,不考虑车轮的垂向运动,顺时针旋转时为车辆的前行方向,车轮所受转矩作用和所受地面作用力如图3所示
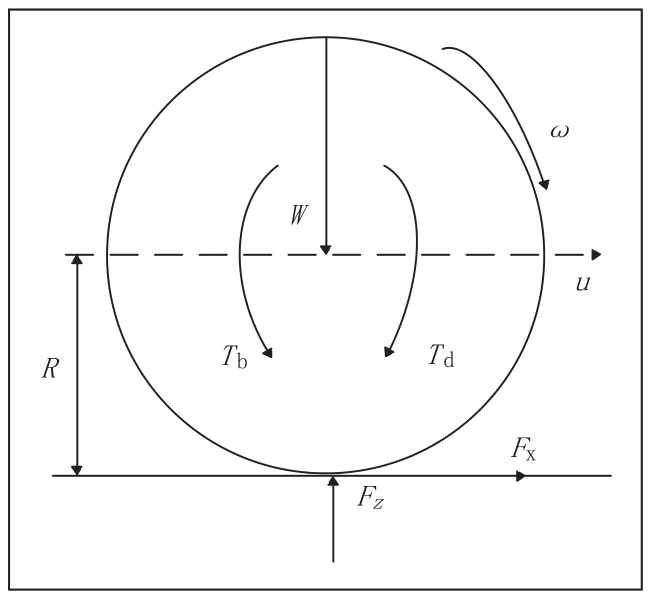
图3 车轮模型
图中,Td为车轮的驱动力矩,Tb为滚动阻力偶矩,ω为车轮的旋转角速度、Fz为地面的支撑力。由车轮所受的转矩和地面所受的作用力得到车轮的动力学方程为:


2.4 轮胎模型
使用“魔术公式”来进行轮胎模型的搭建,该模型对于车辆行驶稳定性控制研究具有十分重要的意义,该模型基于多次轮胎数据实验得到,轮胎所受的纵向力侧向力以及回正力矩,在纯纵滑工况以及纯侧偏工况下我们用公式表达出来
魔术公式一般表达式形式:

其中,B为刚度因子,C为曲线形状因子、D为曲线峰值因子、Y为纵向力Fx或侧向力Fy、E为曲线曲率因子、Sh为曲线水平方向偏移,Sv为曲线垂直方向偏移量。
(1)纯纵滑工况下轮胎纵向力的计算
我们只考虑轮胎在纵向力作用下的运动时受力情况,因为是在纯纵滑的工况下,求出的纵向力的
大小,加入一些修正因子得到:

其中s为纵向滑移率、bi为拟合参数。

(2)纯侧偏工况下轮胎侧向力计算
我们只考虑在轮胎在侧向力作用下运动受力的情况,因为是在纯侧滑的工况下,求出侧向力,加入一些修正因子得到:



(3)轮胎纵滑、侧偏联合工况下的滑移
建立模型时需要考虑纵向力和侧向力联合作用的轮胎特性。在联合工况下,得到纵向力和侧向力计算公式为:

2.5 轮毂电机模型
进行轮毂电机建模采用基于电机实验数据的经验查表法,轮毂电机的输出转矩Tmj,需要经过电动轮内置减速器传递到车轮,因此电动轮输出转矩Twj可以表示为:

式中的i代表轮毂电机减速器减速比,αij代表减速器传递效率。
电动轮存在着驱动功能同时也存在一定制动功能,电动轮转矩输出范围可以表示为:

Tmax(nij)与Tmaxbij分别表示轮毂电机在当前转速nij下的最大输出转矩以及各轮最大机械制动转矩
3 仿真与分析
为验证MATLAB/Simulink模型的正确性,文章采用直线行驶能力来验证模型的正确性,车辆直驶稳定性的两个重要的指标是横摆角速度和质心侧偏角,模型的正确与否通过质心侧偏角和横摆角速度来判定。
在路面附着系数为0.8的路面上给定期望车速,用车辆从5km/h开始匀加速直线行驶,仿真时间为10s,地面状态良好。

图4 速度跟踪

图5 横摆角速度
由图可知,在直线行驶的工况中的中,车辆速度跟随效果较好,质心侧偏角和横摆角速度基本无变化,直线行驶能力较好,可以满足车辆动力学的要求,可以用于后续车辆直驶稳定性控制策略的研究。

图6 质心侧偏角
4 结论
质心侧偏角和横摆角速度变化趋势基本一致,车辆模型具有可靠性。可用于车辆动力学的研究,对后续的车辆直驶稳定性控制策略的研究打下了坚实的基础。