显隐性危险源场景下驾驶员避险能力评价研究
2022-07-18仲璜王鹏李晓虎林淼朱彤
仲璜,王鹏,李晓虎,林淼,朱彤
(1.长安大学 运输工程学院,陕西 西安 710064;2. 中国汽车技术研究中心有限公司,天津 300300)
驾驶行为是与驾驶员相关的各种处理操作的总称,包括了驾驶员的感知、判断、决策,以及对车辆的控制[1].有研究表明,在所有由人的因素导致的交通事故中,驾驶人行为失误引发的交通事故占到了87.5%[2].驾驶员驾驶动态感知能力、驾驶应急反应能力等能够决定驾驶员避险能力[3]. Ventsislavova等人认为区分危险事件和非危险事件的能力是危险感知的一个重要方面[4].Bellet认为驾驶员避险能力的差异取决于驾驶员个体的风险检测能力、对险情的关键评估、避险措施方面的差异[5].朱洪渊利用静态图片形式进行场景实验,发现不同经验的驾驶员在危险感知的数量、层次上存在差异[6].楚彭子从反应时间、无效识别次数等方面分析驾驶员危险感知和眼动行为差异[7].Horswill提出可通过危险感知训练来提高危险感知能力[8].Thomas等人提出两次未通过危险感知测试的人更有可能发生交通事故[9].孙龙则对不同危险类型下驾驶员的经验优势在危险知觉不同成分上的表现进行了区分[10].
目前研究的场景大多脱离真实的事故场景,且对危险感知的研究多针对单一类型的危险目标,有关场景中危险源的显隐性对驾驶员避险能力的影响研究相对较少.本文将危险感知分为显性和隐性危险感知,借鉴CIDAS数据库中的真实事故案例,仿真构建出危险源显隐性不同的测试场景,并招募31名驾驶员进行驾驶模拟实验.之后利用PCA法对采集到的进入场景时车速、制动后车速、车辆平均减速度、车辆最大减速度、归一化制动反应时间、平均方向盘旋转度和最大方向盘旋转度驾驶参数数据进行降维,并用Ward法系统聚类对降维后得到的主成分因子进行聚类分析,实现对不同危险测试场景下驾驶员避险行为的特征提取和避险能力的评价建议.
1 实验过程
1.1 实验对象
本实验共招募被试者31名,均取得C1及以上驾驶证.被试者年龄为23~27岁,均身体健康,精神状态良好.
1.2 危险测试场景搭建
本实验借鉴CIDAS数据库中四种类型不同的真实事故场景来构建危险测试场景,CIDAS全称是中国交通事故深入研究(China In Depth Accident Study),项目致力于通过对中国道路交通事故的深入调查、分析和研究以建立详细的交通事故数据采集流程[11].
实验使用Prescan8.6.0来搭建测试环境,测试场景都搭建在双向6车道,单一车道宽度为3.75 m的城市道路上,被试车辆一直由西向东直线行驶,沿途触发四个危险测试场景.按照危险源的类型不同可将场景分为显性危险源场景和隐性危险源场景,区别在于驾驶员是否可以通过观察或借助仪表检测来发现危险车辆,测试场景布置方案具体如下:
场景A(汽车-两轮车隐性危险源测试场景):被试车辆在中间车道自西向东行驶,此时一辆货车停在右前方的非机动车道上,一两轮车以16 km/h的速度从货车前头开动并向北横穿马路.
场景B(汽车-两轮车显性危险源测试场景):被试车辆在中间车道自西向东行驶,一两轮车以16 km/h的速度经前方人行横道由北向南穿行马路.
场景C(汽车-汽车隐性危险源测试场景):绿灯情况下,被试车辆在中间车道自西向东行驶通行十字路口,另一汽车以48 km/h的速度由南向北行驶欲闯红灯通行十字路口,其在进入十字路口前动向被原地停车等待的左转车流遮挡.
场景D(汽车-汽车显性危险源测试场景):被试车辆在中间车道自西向东行驶,停在右前方车站前的另一汽车突然启动并匀加速至20 km/h的速度汇入中间车道.
1.3 实验流程
实验前先告知被测试者此次实验的目的以及操作上的注意事项,随后驾驶员可以在相似场景中驾驶以提前熟悉测试时的驾驶环境.实验过程中,通过将场景实时动画以驾驶员视角输出来获得实时驾驶视景,再和驾驶模拟器在环以模拟危险驾驶环境.转向、制动和油门信号都被实时输入进Simulink中以控制驾驶车辆.同时,各驾驶参数数据被输出到Matlab的工作区中.
1.4 数据采集
数据采集频率设定为20 Hz.本次实验采集的驾驶参数和所有驾驶员完成实验后输出的各项数据范围如表1所示.
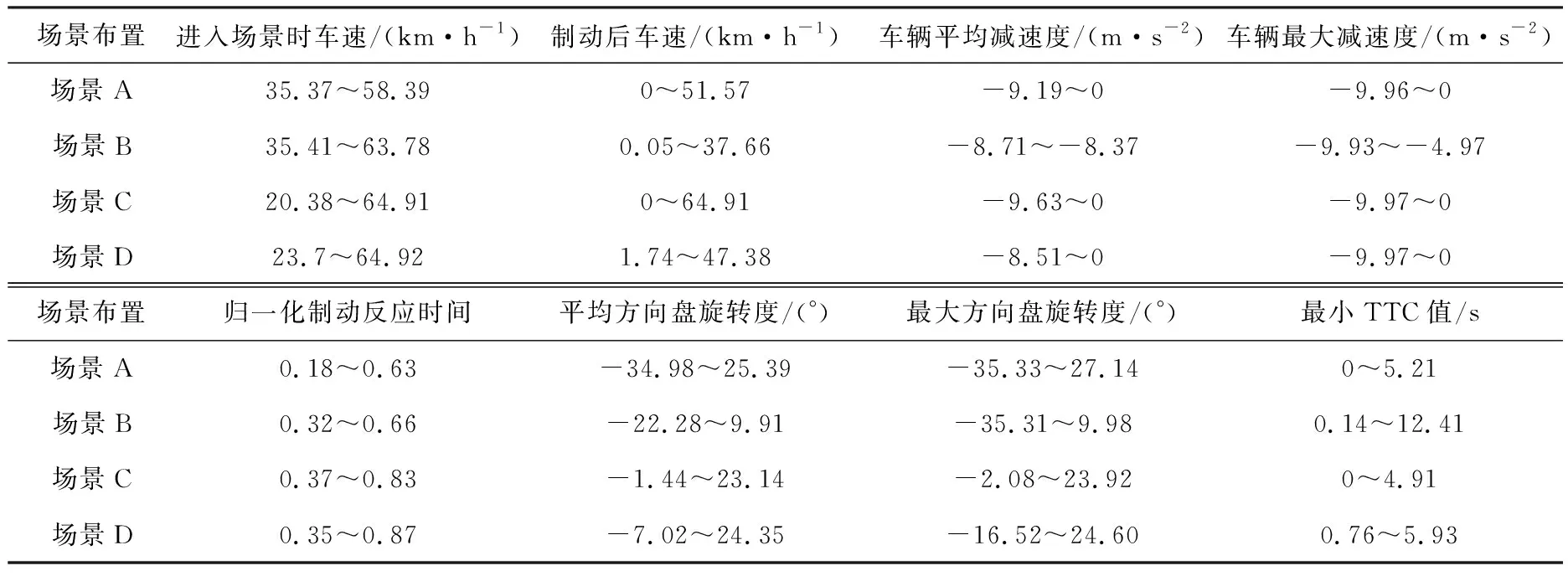
表1 驾驶参数数据和最小TTC值范围
关于方向盘旋转度,左转为正数,右转为负数;关于归一化制动反应时间,由于无法准确地获知驾驶员首次关注到危险的时间,故本研究只利用场景开始时间和驾驶员做出反应的时间之间的差值来体现驾驶员制动反应快慢差异.考虑到每个被试在各测试场景中的实验时长不等,将此差值进行归一化处理.
T=(ts-tm)/tn
(1)
式中:T为归一化制动反应时间;ts为制动开始时间;tm为场景开始时间;tn为场景持续时间.
本文采用TTC指标,即两个车辆以现在的速度和相同的路径继续行驶到达碰撞所用时间来对驾驶员的避险能力进行评价.最小TTC值为0时,意味着两车间发生碰撞;最小TTC值越大,则两车间产生碰撞的风险越小.
2 基于PCA的驾驶参数数据降维处理
本文采用IBM SPSS Statistics 22.0软件对四种危险测试场景下的驾驶参数数据分别进行主成分分析.首先需要对其分别进行KMO和Bartlett球体检验,经检验得:KMO检验系数均大于0.7,说明采用PCA方法分析效果较好;Bartlett检验P值均小于0.05,表示分析数据具有结构效度.
随后,取主成分分析后特征值大于1,且能使累计贡献率大于85%的项数为各场景驾驶参数数据降维后的主成分因子.各场景的驾驶参数数据经主成分分析方法处理后,都能被降维成3个主成分因子PC1、PC2、PC3,它们的贡献率叠加后都能够达到85%.各测试场景数据降维后所得的主成分因子PC1、PC2、PC3的贡献率如表2所示.
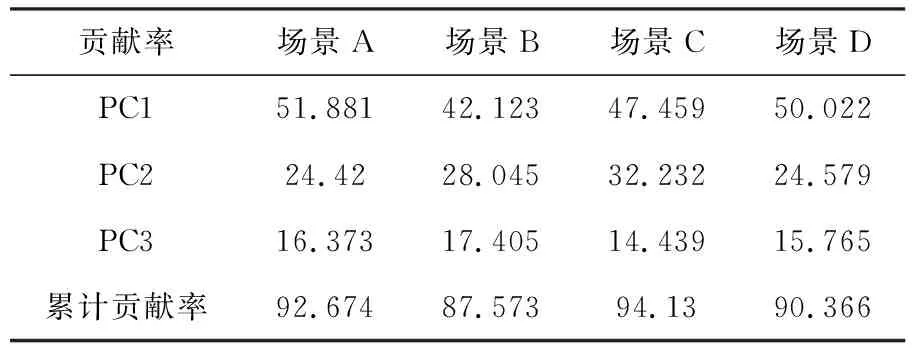
表2 主成分因子累计贡献率 %
3 聚类分析
系统聚类是开始时把每个样品作为一类,然后把相隔距离最小的样品首先聚为小类,再将已聚合的小类按类间距离再合并,不断继续下去,最后把一切子类都聚合到一个大类.结合降维后得到的主成分因子,本文采用离差平方和法(Ward法)分别对各危险测试场景下降维所得的主成分因子PC1、PC2、PC3进行聚类.Ward法系统聚类思路是首先将n个样本各看成一类,此时的离差平方和W=0,随后每次都把其中的某两个合并成一类.此方法把某两个样本合并后增加的离差平方和作为类间距离:
(2)

类间距离在10~15之间取值时各场景系统聚类的效果都较好, 各测试场景的 驾 驶 样本此时都可聚为4类.以各测试场景的主成分因子PC1、PC2、PC3为X,Y,Z坐标轴分别绘制3D散点图1~图4.图上圆点旁的数字标签为系统聚类后所代表的类别数.
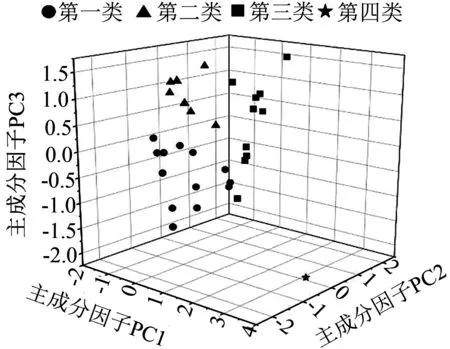
图1 场景A聚类散点图
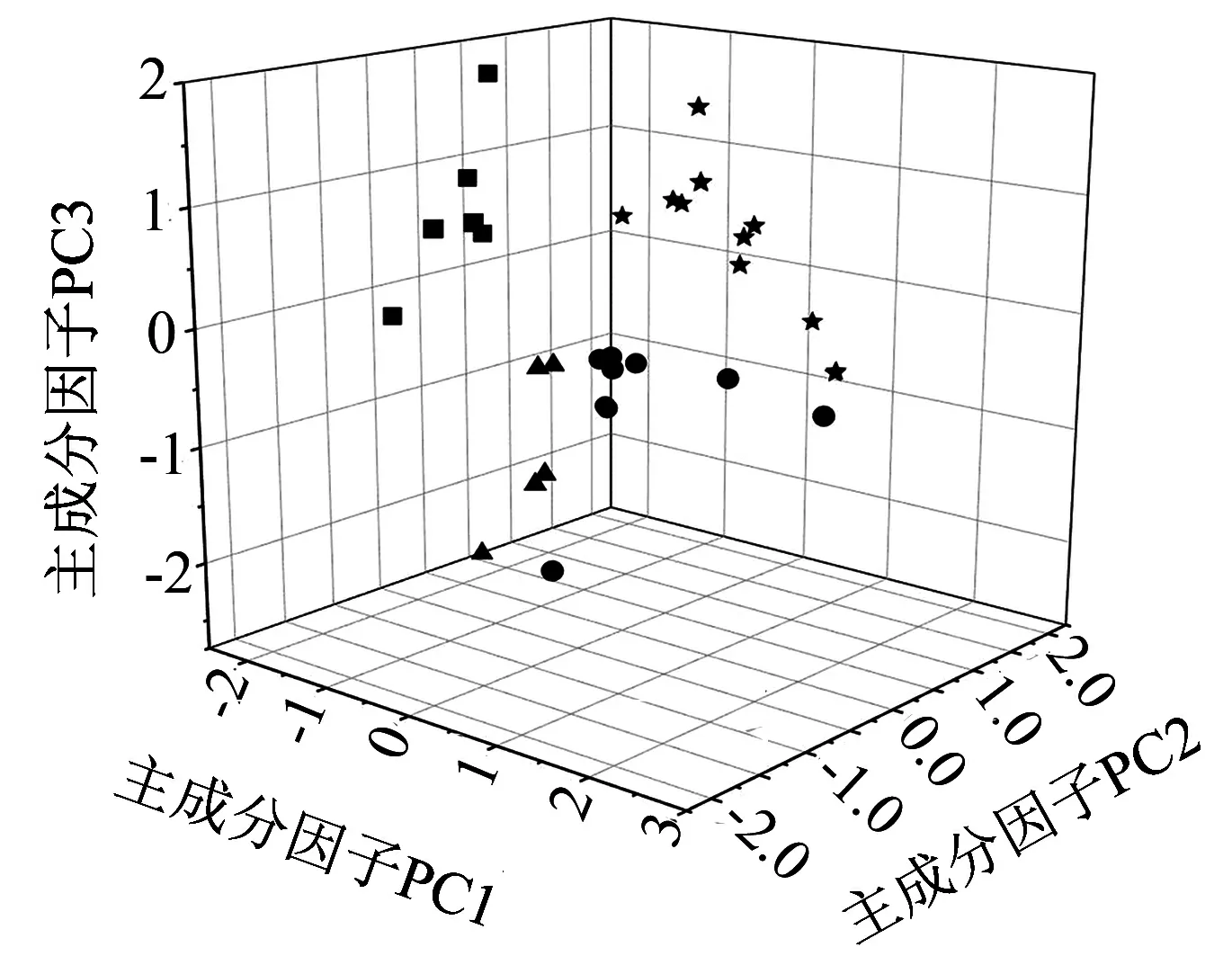
图2 场景B聚类散点图
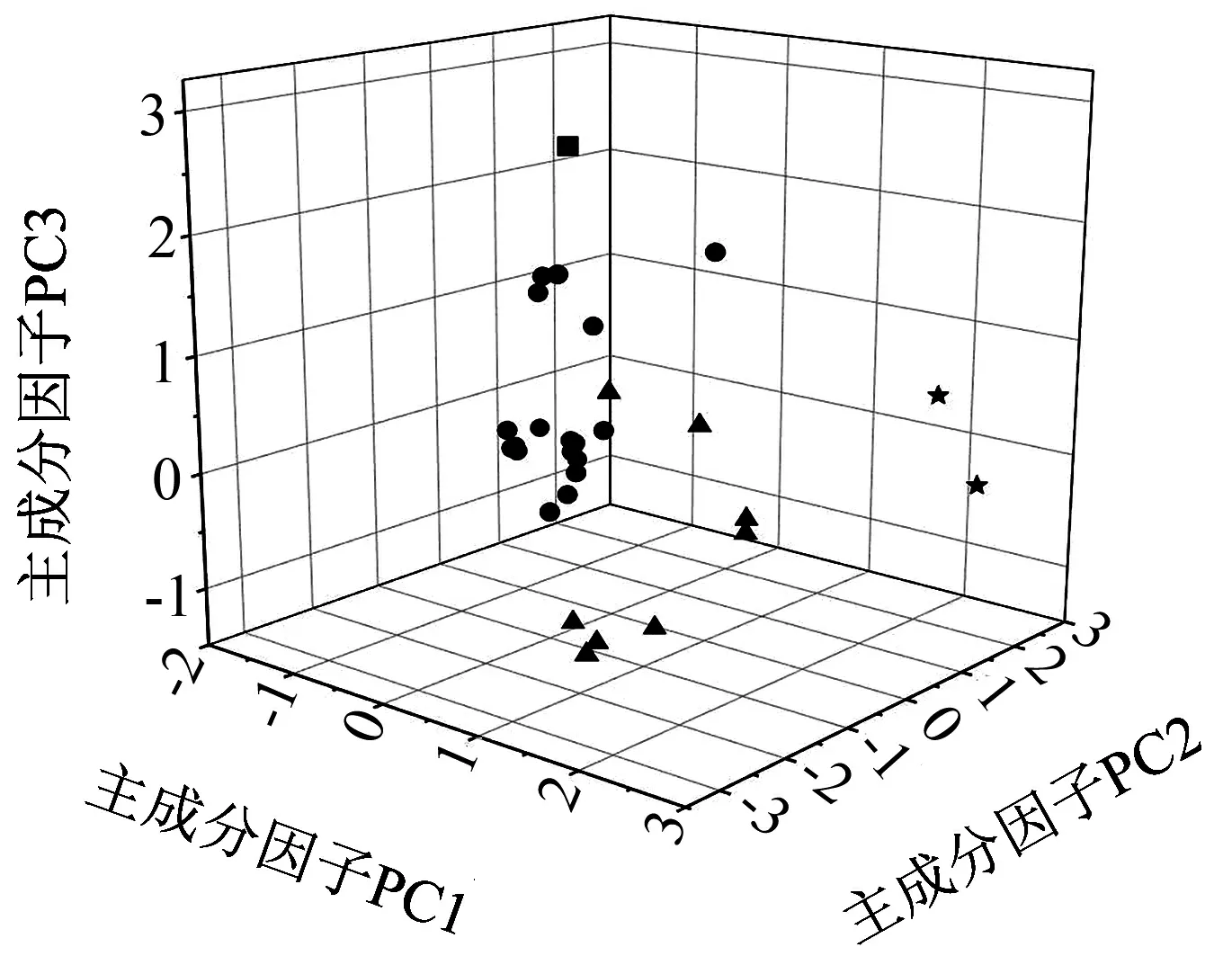
图3 场景C聚类散点图
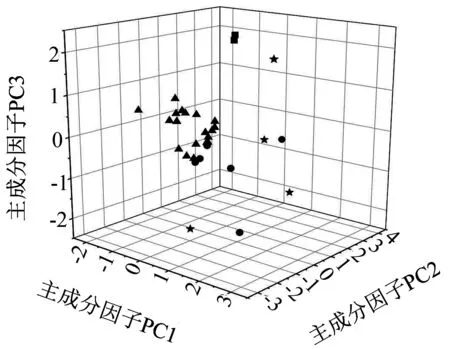
图4 场景D聚类散点图
场景A:该场景下31个驾驶员样本中最小TTC大于1 s的样本都属于第一类.故第一类可以表征驾驶避险能力比较优秀的驾驶群体,这主要得益于第一类驾驶员进入场景时车速最低且避险反应速度最快,归一化反应时间最小,制动力度最大.其余三类驾驶员群体大部分都发生了碰撞事故,比较后发现第二类的平均制动后车速比第三类低,也就是说第二类群体产生碰撞事故时的自车车速较低,事故伤害的程度大概率较低,故第二类样本的避险能力要优于第三类.第四类避险能力最差,且仅有一个样本,这是因为该驾驶员遇险时没能及时采取任何避险措施.
场景B:该场景下避险能力最优秀的驾驶群体集中在第一类,第一类的最大特点是进入场景时的车速低以及归一化反应时间较小,因此绝大部分第一类样本的最小TTC值都大于3 s,其群体的避险行为具有提前性、预见性;第二类和第三类驾驶群体避险能力也比较良好,最小TTC值都落在[2.3 s,3 s]区间内.第三类的归一化反应时间同样较小,其平均值约等于第一类;第二类的归一化反应时间则相对一般,但是进入场景时的车速最低.经比较,第二类驾驶群体避险能力略优于第三类,这两类驾驶群体避险措施也能做到及时到位;第四类的避险能力最差,其最小TTC值普遍偏低,并且进入场景时车速,制动后车速,归一化制动反应时间均远大于其他三类,综上第四类的避险能力最差,虽未发生车辆碰撞,但是其避险行为呈现滞后性.该场景下,第一类、第二类、第三类的避险能力均优于第四类;第一类、第二类、第三类的区别更多体现在避险行为的风格与习惯差异上.
场景C:该场景下仅有13个驾驶员未发生车辆碰撞,其中12个样本都属于第一类.这取决于第一类的归一化反应时间最小,进入场景时车速较低并且制动力度最大,所以第一类驾驶群体的避险能力要显著强于其他三类.第二类驾驶群体进入场景时车速较高,且避险反应速度一般,故大多发生了车辆碰撞.相较于第二类群体,第三类,第四类群体不仅产生了车辆碰撞,并且在碰撞前都没能及时采取避险措施,因为第三类进入场景时的车速低于第四类,故第三类群体的避险能力要略优于第四类.
场景D:该场景中没有车辆碰撞的情况发生.根据最小TTC值来看,第一类与第二类的最小TTC值均大于1 s.第一类驾驶群体遇险时的平均减速力度比第二类大约2 m/s2,而归一化制动反应时间则与第二类相近,可知第一类驾驶群体在避险时制动力度最大,避险行为最迅猛;第二类驾驶群体避险反应同样迅速,不同于第一类的是,第二类驾驶群体的制动力度颇为柔和,但同样也能够顺利避险,故第一类,第二类避险能力都为优秀;第三类的归一化制动反应时间最长;第四类的制动力度最小,归一化制动反应时间较长,这就导致第三类、第四类的最小TTC值几乎都在1 s内,险些造成碰撞,所以第三类的避险能力较差,第四类避险能力则为最差.
4 避险行为特征提取和表现评价
汇总以上四个危险测试场景下各聚类类别的驾驶群体避险行为特征如表3所示.由表3可知,避险能力优秀的驾驶员具有进入场景时车速低,归一化反应时间短以及制动力度大的避险行为总体特征.相反,避险能力较差的驾驶群体的避险行为特征主要体现在进入场景时车速较高,避险反应较慢以及制动力度不够大甚至有少数驾驶员没能及时做出转向、制动等避险措施.
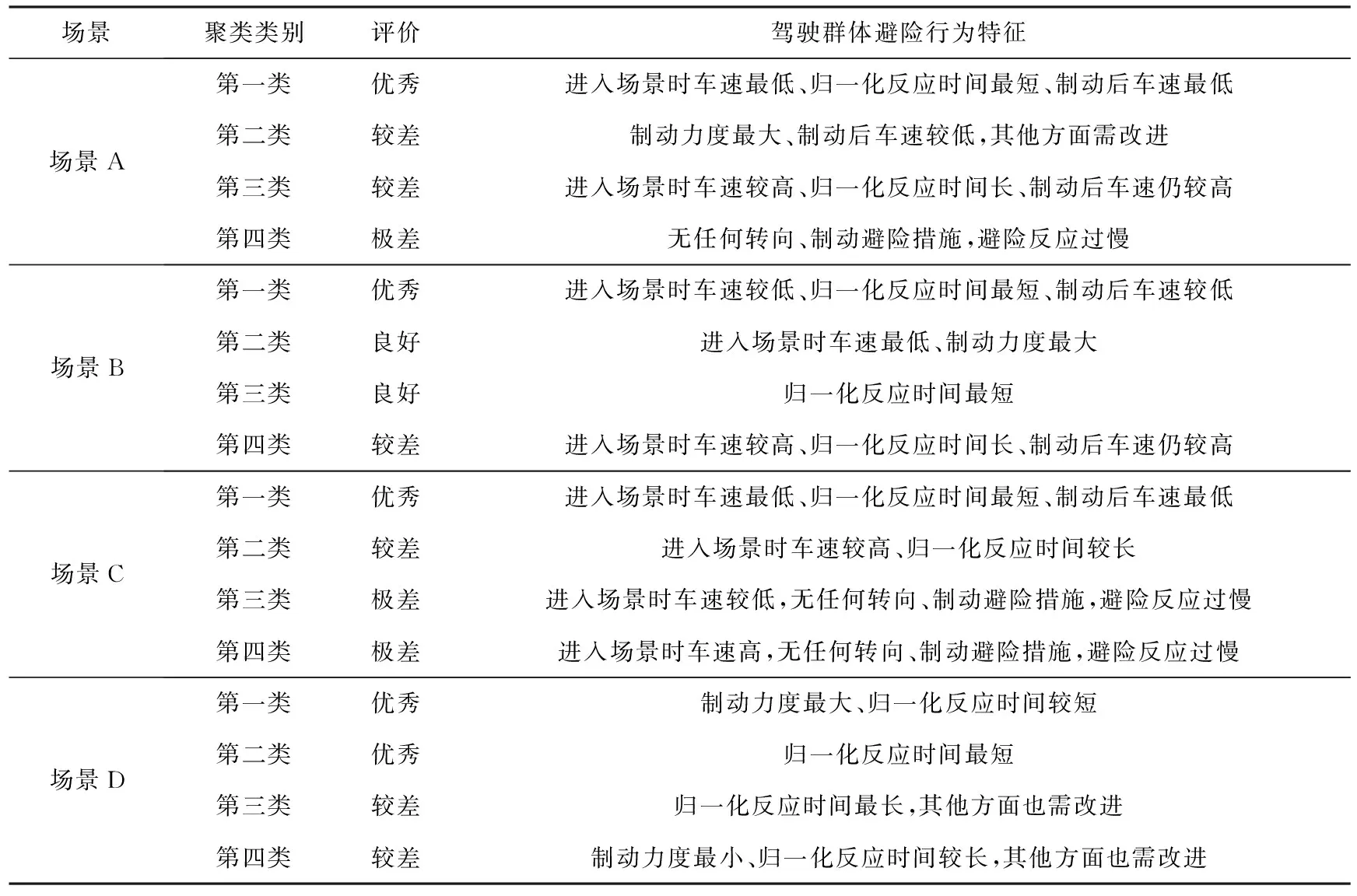
表3 不同聚类类别的驾驶群体避险行为特征
图5为各驾驶员各场景聚类类别与其避险能力评价图,图上每一竖排即为对应编号驾驶员在场景A、B、C、D下的避险表现情况.数字代表聚类类别,颜色代表对避险行为的评价.矩形白色指其所在类别最小TTC平均值大于1 s,避险行为良好,无须改正;黑色则指所在类别最小TTC平均值小于1 s,避险能力较差,避险行为需要改进训练.
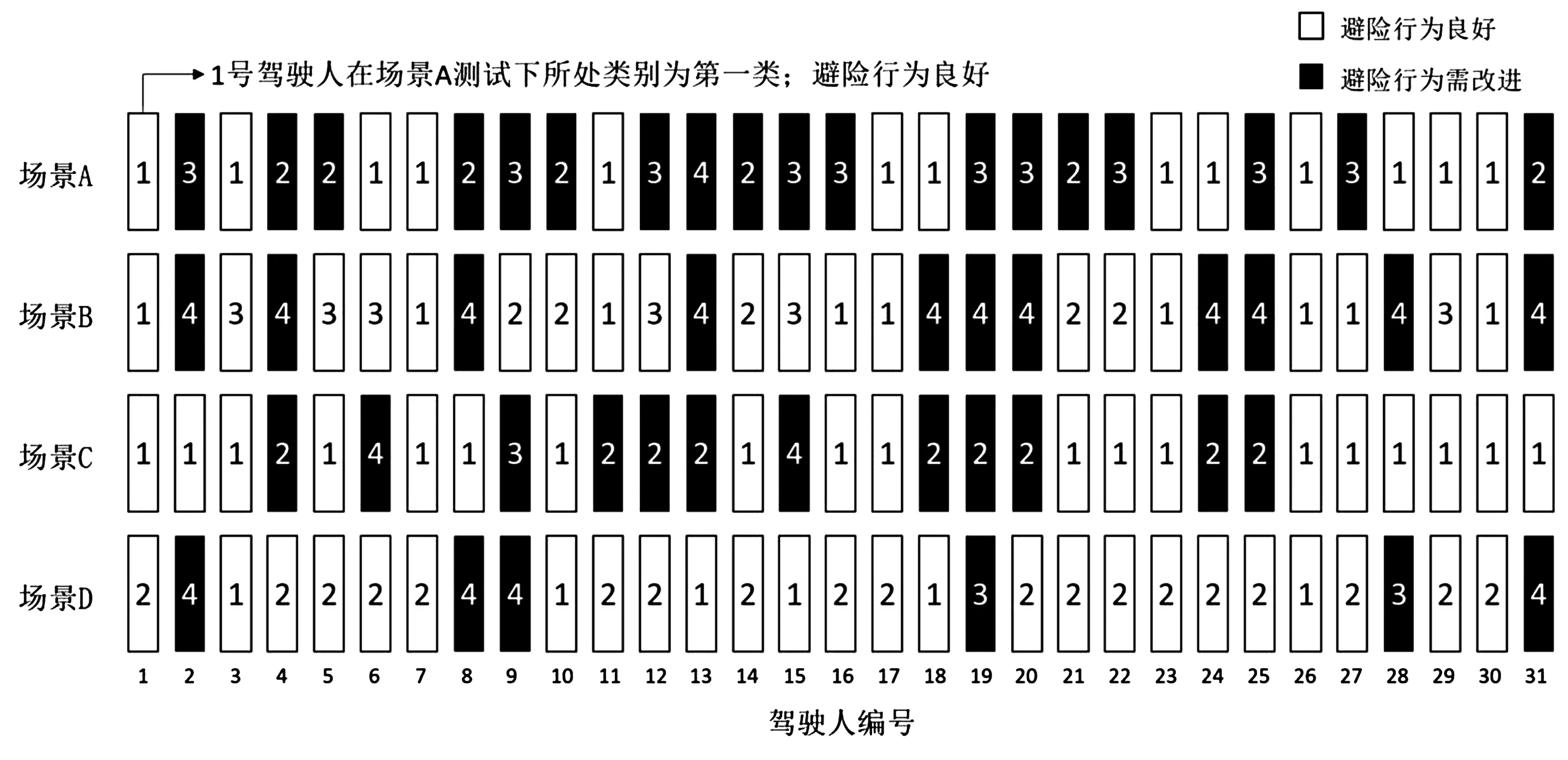
图5 个体驾驶员避险行为聚类类别与避险行为表现评价
由图可知,符合隐性危险源场景A、C避险行为都表现良好的驾驶员有9人,而符合显性危险源场景B、D避险行为都表现良好的驾驶员有19人.隐性危险源测试场景A、C下避险行为为良好的驾驶员数量要远小于显性危险源测试场景B、D下的,说明危险源为隐性时避险难度要远大于为显性时难度.并且在隐性危险源测试场景A、C下避险表现良好的驾驶员群体往往在显性危险源测试场景B、D下表现也同样优异,反之则不成立.隐性危险源测试场景下表现优异的驾驶群体特征体现在归一化反应时间普遍小,制动力度普遍大并且在进入危险场景时车速平稳.隐性危险源场景下的避险表现更能检验出驾驶员避险能力的优秀与否.
此实验中,编号为1、3、7、17、23、26、29、30的驾驶员在四个危险测试场景下的避险表现都很优秀,而编号为2、4、8、9、13、19、20、31的驾驶员则表现较差.各驾驶员可根据表3其在各场景下聚类类别所代表的避险行为特征进行针对训练与调整,比如编号19的驾驶员四个场景避险表现都不尽如人意,其避险反应、制动力度、驾驶习惯上都需要改进调整;编号11的驾驶员在场景C表现较差,属于第二类驾驶员,可知其进入路口时车速较高从而导致避险反应慢,需教导其进入危险场景时控制车速,平稳驾驶.
5 结论
(1)显性危险源测试场景下驾驶群体的总体避险情况优于隐性危险源测试场景下的避险情况.危险源的显隐性会极大地影响驾驶员的避险行为表现;
(2)在隐性危险源测试场景下避险表现良好的驾驶群体往往在显性危险源测试场景下表现也同样优异,隐性危险源测试场景更能检验驾驶员避险能力的优秀与否;
(3)避险能力优秀的驾驶员具有进入场景时车速低,归一化反应时间短以及制动力度大的避险行为特征.与之相反,避险能力较差的驾驶员避险行为特征体现在进入场景时车速高,避险反应慢以及制动力度不够大上.通过避险行为特征,可对驾驶员的避险行为进行具体评价,并给出指导意见和进行针对训练,以达到提升避险能力的目的.
