我是无人机小飞手多旋翼无人机的基本组成和布局(下)
2022-07-18北京小飞手教育科技有限公司彭涛
北京小飞手教育科技有限公司/彭涛

复杂的飞控系统
三、控制系统
1.飞行控制系统
飞行控制系统简称飞控,可以看作无人机的大脑,是完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的核心系统。不管是无人机自动保持飞行状态(如悬停)还是对无人机人为操作,都需要通过飞控系统对其动力系统进行实时调节。工作时,飞控可发送各种指令,并处理各部件传回的数据,就像人体的大脑对身体各个部位发送指令那样。一些高阶的飞控系统除了保证无人机正常飞行导航功能以外,还有安全冗余、飞行数据记录、飞行参数调整和自动飞行优化等功能。
飞控一般包括传感器、机载计算机和控制舵机三大部分,以实现无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类功能。对于多旋翼无人机来说,其主要由检测模块、控制模块、执行模块以及供电模块组成。其中检测模块实现对当前姿态进行量测;执行模块则对当前姿态进行解算、优化控制,并对执行模块产生相对应的控制量;供电模块对整个系统进行供电。为实现这些功能,多旋翼无人机的飞控上一般会装有加速度计、气压计、陀螺仪、地磁仪、定位芯片、主控芯片等多种零部件。

手持式无人机遥控设备

无人机操纵地面站
2.遥控系统
无人机遥控系统,主要由遥控器、接收器、解码器、伺服系统组成。遥控器是操作平台,接收器接到遥控器信号进行解码,分离出动作信号传输给伺服系统,伺服系统则根据信号做出相应的动作。常见的遥控设备有手持遥控器和地面站两种。此外,消费级无人机通常还支持手机APP操纵方式。
无人机遥控系统一般采用2.4GHz无线电信号频率,以保证足够的传输距离。不同无人机间的通信协议不同,常见的有PWM、PPM、S-BUS、X-BUS等几种。
四、多旋翼无人机气动布局分类
多旋翼无人机常见的气动布局有“X”型、“十”型和“H”型3种。
1.“X”型
“X”型是多旋翼无人机最基础、最常见的气动布局。其电机臂的分布方式为以飞行器前进方向为中线,向左右两侧等分角度。以四旋翼无人机为例,左前和右前机臂距机头中线的夹角均为45°,左后和右后机臂距机尾方向中线的夹角也均为45°。左右相邻电机臂上放置转动方向相反的电机和螺旋桨,以抵消电机转动时产生的反扭矩。若电机臂数超过4个,则按照等分原则,以60°为夹角(六旋翼无人机)或45°为夹角(八旋翼无人机),成对增加电机臂数。
2.“十”型
“十”型多旋翼气动结构是最早出现的布局之一。这种布局结构相对简单,只需通过改变横竖轴向上的电机转速,即可改变飞行器的运动姿态,进而实现前进后退和左右平移的基础飞行。不过,随着无人机航拍的兴起和普及,采用“十”型布局的无人机在拍摄正面镜头时,螺旋桨会出现在画面的视界里(俗称“漏桨”),造成不便。随着飞控的性能提升,该型布局逐渐被“X”型所替代。
四旋翼的“十”型布局最简单,通常为无人机横纵轴上各设一对电机臂。若电机臂数增加,则保证无人机纵轴(前进后退方向)上的电机臂不变,其他电机臂以60°夹角(六旋翼)或45°夹角(八旋翼)平均分布即可。
3.“H”型
“H”型布局与“X”型气动布局相似,但出现时间最晚。其优点是可将电机臂设计成折叠结构,以进一步减小无人机的体积,便于日常携带。但是“H”型布局的缺点也很明显,即相同级别下,“H”型布局的无人机需要更大尺寸的螺旋桨,才能达到同“X”型布局无人机一样的飞行性能,这直接导致了整机的重量增加。

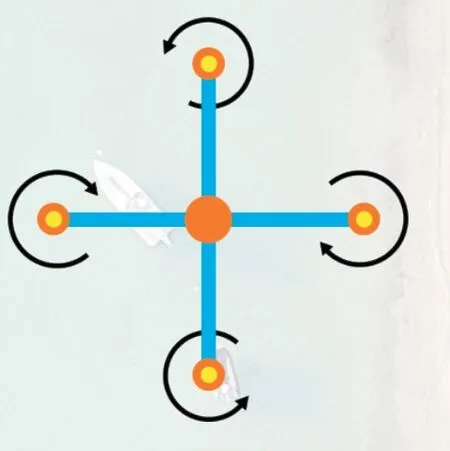
“X”型旋翼气动布局与电机转向示意图
“十”型旋翼气动布局与电机转向示意图

采用“H”型布局的无人机

采用八旋翼结构的大型无人机

采用四旋翼结构的消费级无人机
五、多旋翼无人机常见分类
常见的无人机有四旋翼、六旋翼、八旋翼几种。其中,四旋翼是一种结构简单、飞行效率较高的多旋翼结构,也是目前市场上保有量最多的多旋翼无人机类型。但是,四旋翼无人机没有动力冗余设计,在飞行中只要有一个电机停止转动,无人机都会出现失控的情况。六旋翼无人机相较于四旋翼无人机,增加了动力冗余,提高了飞行的安全性,即便出现电机停转(不超过2个)的情况,仍然可以安全降落。而对于任务载荷要求较高的大型多旋翼机型,在设计时为增加飞行效率,通常会采用8个甚至16个旋翼的设计方式。
那么,旋翼的数量到底多少才是最好的?这个问题可以从以下几方面综合考虑。
1.稳定性
对于多旋翼飞行器来说,飞行时能够参与控制的量(电机数)越多,飞行控制越精细。此外,旋翼数越多,对动力系统故障的容错率就越高,即飞行器拥有更多的动力备份,保证其在突发状况下仍具有平稳降落的能力。从这个角度看,八旋翼无人机的稳定性无疑是最佳的。
2.设计难度
随着旋翼数量的增加,每个旋翼间的距离会变小,可供设计布局的空间会减小。对于四旋翼无人机来说,其机臂的长短、选用螺旋桨的尺寸种类繁多,可根据飞行环境、任务需要进行不同搭配。而八旋翼无人机为避免螺旋桨干涉,电机臂尺寸通常不能过短,但增加电机臂会增大整机重量,螺旋桨尺寸也不能设计得过小。另外,旋翼臂增加后,其很难设计成折叠的样式,导致无人机占用空间更大,运输和存储不便。这样看来,四旋翼无人机的灵活性更高一筹。
综上,对于无人机来说,应根据其实际用途来选择旋翼数。通常消费级无人机更适合四旋翼结构,而对载荷有一定要求的无人机,如植保无人机等,则可选择六旋翼或八旋翼机构。