目标检测算法在智能交通监控中的应用研究
2022-07-18李轶杰
李轶杰
现代交通管理系统影响着当代人出行的方方面面。其中,车辆目标识别作为交管系统的核心要素,其研究具有重要且深远意义。针对现有交通问题,研究了几种典型的由卷积神经网络作为骨架构建的目标识别算法,分析这几种算法的优缺点。对公交站牌监控中不同的交通状况进行分析统计,从而更加高效地解决交通管理方面存在的问题。
截至2021年12月27日,中国机动车保有量已经突破3.93亿辆,其中汽车保有量突破了3亿辆。城市道路交通所承担的压力与日俱增。一个城市的交管系统直接决定了当地交通是否方便人们出行及管理部门应对违法违规现象的处理速度,因此智能交通管理系统已成为当前中国交通领域的热点话题,车辆目标检测算法的研究与创新迫在眉睫。
车辆目标检测算法可以应用在道路交通的多个方面,比如通过应用在交通路口的监控摄像头,可以根据当前车辆的拥堵情况,实时将数据上传到各类地图中,以供驾驶员选择最优路段行进。应用在停车场中,通过对停车场整体的停车状况进行分析,缓解停车位不足造成拥堵的问题。应用在智能公交站牌上,可以通过顶部的摄像头,根据不同编号的公交车的特殊标志进行识别并及时地向乘客播报即将到达的公交车的编号,以及对在公交站牌附近违规停车,占用公交车道的机动车,识别其车型与车牌号,进行相应的证据获取和处罚。
由此可见,车辆目标检测算法的应用可以有效缓解交通问题,提高人们出行的便利性,减少违规停车的发生率。本文对比了传统的目标检测算法和基于卷积神经网络的目标检测算法,为寻找更加适合的目标检测算法进行了研究。
目标检测算法本质上是将图片中的前景与背景进行划分后,对需要的目标根据不同的外观特征进行识别的算法。对于车辆的目标检测而言,即在所需要识别的场景中,针对行人或是车辆的不同外观特征以及车牌号,准确的完成识别任务,从而实现路口车辆数目统计,特定车辆目标跟踪,以及违规车辆的监测等一系列任务。
(一)传统目标检测算法
传统的目标检测算法,实质上就是通过不同尺寸的滑动窗口在图片上进行平移滑动,从中获取不同视野的候选区域,然后提取候选区域相关的视觉特征,最后通过传统机器学习中的分类器进行分类判断。
在交通监控系统中使用传统目标检测算法作为检测器,可以实现对于车辆目标检测的基本需求。首先将路面,建筑以及车辆进行前景与背景的区分,随后针对所检测到的车辆进行较为细化的划分。但是道路上的车辆存在不同程度的遮挡,而且在不同的天气状况下,也会对监控画面造成影响,干扰检测效果。同时,因为基于滑动窗口的区域选择策略没有针对性,时间复杂度高,检测速度相对较慢。因此,该类算法虽然非常经典,但并不完全适用于车辆目标检测。
(二)基于卷积神经网络的目标检测算法
传统的目标检测算法检测速度较慢,人为设计的特征提取模板不够全面且难以处理遮挡,基于深度学习的目标检测算法性能要优于传统目标检测算法,其主要采用的是卷积神经网络作为特征提取网络。卷积神经网络通过随机初始化的卷积核,在目标图像上不断地平移,以此获取相应的特征图。而其卷积核因为在反向传播过程中不断地进行调整,从而获取具有显著特征的特征图。通过卷积神经网络可以提取到更加深层次、语义化的特征。因此,基于卷积神经网络的目标检测算法在出现后,便被广泛应用在目标识别任务当中。
1.基于one-stage的目标检测算法
目标检测可以归纳为两个主要的任务,其一是获取目标相较于整张图像中的位置,可以看作是回归任务,其二是判断物体的类别,可以看作是分类任务。onestage目标检测算法,即一阶段目标检测算法。该类算法是直接对于需要进行目标识别的图片进行预测和分类。经典的one-stage目标识别算法有YOLO系列,SSD以及DetectNet,相较于two-stage算法,不需要对大量的候选框进行筛选,而是直接产生物体的类别概率和位置坐标值,经过单次检测即可直接得到最终的检测结果,其运行速度会快很多。
当图片中需要进行识别的目标只有一个时,只需要进行特征提取并进行分类即可得出所需识别的物体的位置与类别。但当识别的任务是多个物体时,需要对图片使用网格(grid)进行划分,为bounding box提供一定的候选区域,其作用是为了限制某个目标的bounding box偏移,防止其移动到其他需要识别的对象的网格中,影响识别的效果。目標识别算法只需要针对当前候选区域的目标框内的物体进行分类,无须关注目标框外的信息,就可以得到较为精确的分类。模型的损失函数也将由位置损失与分类损失共同构成。
2.基于two-stage的目标检测算法
Two-stage目标检测算法,即两阶段目标检测算法。其主要是将识别过程分成两步骤,首先获取需要识别的物体的大致位置,然后对物体进行分类和位置的回归,最终得出分类结果和所在位置的坐标。经典的算法有:R-CNN,SPP-net,Fast R-CNN以及Faster R-CNN。该类算法的核心步骤即:1.训练RPN网络,通过NMS以获得存在物体的大致区域 2.训练目标区域检测网络以获取对于物体的精确位置以及相应的类别。
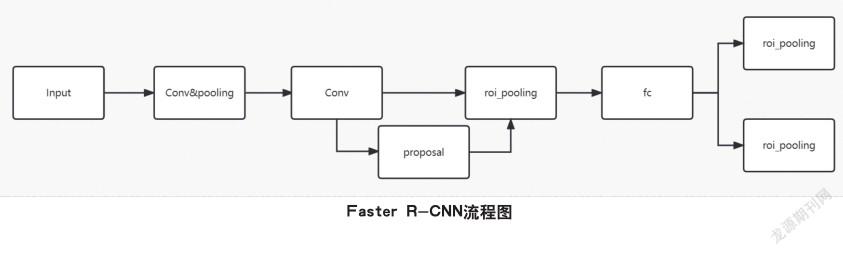
Faster R-CNN流程如图所示。
首先将监控像头获取的视频分帧转换成所需要的图片,经过预处理后,送入主干网络中。然后通过卷积提取到相应的深层特征图,将特征图送入RPN网络,经过滑动窗口,获得相应的包含物体的候选框,此时的候选框起到的作用是将前景和背景区分开。然后将所获得的候选框映射到特征图中,进入roi_pooling层,进行位置回归和修正。在得到较为准确的候选目标对应特征图上的一部分区域的特征后,会经过全连接层来进一步对候选区域的特征进行表示。最终通过分类和回归的分支操作,分别完成对于候选目标类别的判断和精确位置的确定。
对于主干网络来说,首选CNN网络,该网络随着网络深度的提升,能够获取更加复杂且深层次的图片特征。面对一些需要提取较为深度特征的情况,存在两种解决策略,第一种是增大网络的宽度,比如GoogleNet,优点是可以有效增加神经元个数,提升模型的复杂度的同时提高学习能力,缺点是学习能力过强容易导致过拟合现象的发生。另一种解决策略是加深网络的深度,比如ResNet,深层次的网络可以有效加强其对于非线性特征的泛化表达能力,增强其鲁棒性。但深层次的网络规模会导致计算量增大,同时会导致梯度消失和梯度离散等问题。因此在网络深度较大的时候会同时采用残差结构来保证网络学习特征的能力。
针对道路上车辆识别的情况来看,很多卷积神经网络是运行在终端的。也就是说不能忽视目前计算机运算能力有限的前提条件,无休止的增大网络的宽度和深度。而应该在设计网络的同时,考虑其深度,宽度和其实际性能的平衡。
3.特征融合方式
在目标检测的过程中,大部分使用的是以卷积神经网络为骨架的特征提取网络。网络层数越浅,计算量相对较少,相对来说,能够较好保留图片中物体的轮廓信息,但是能提取到的深层语义和信息就越少。网络层数越深,可以更好地获取深层的特征,但是因为卷积层数过多,所需的参数就越多,因此为了减少参数量,通常使用池化操作来减少参数。池化后的特征图,保留了关键特征,但是却消除了一些小物体的信息。
如果在交通监控中,仅仅使用经过多次卷积池化得到的特征图来作为车辆目标识别的对象,当卷积池化的次数较多时,会影响离摄像头较远处车辆的识别效果。当卷积池化次数较少时,面对车辆外观区别不大的情况,会影响对不同车辆的区分效果。
因此我们需要将低层特征和深层特征进行融合,以此达到最好的特征提取效果。
(1)双线性插值法
图像在进行池化操作后,其尺寸通常会发生变化,如果想融合特征,就需要将不同尺寸的图像进行合并。如果是将大尺寸图像进行缩放,所得到的像素值一般不是整数,图像严重失真,如果是将小尺寸图像放大,小图像的像素点到大图像中不是满射,失去细节纹理。而双线性插值法充分利用了原图上四个真实存在的像素值来共同决定目标图中的一个像素值,所取得的效果要优于最近邻插值法。
(2)FPN网络
FPN网络,即特征金字塔。在其出现之前,深度学习仅仅采用特征提取网络的最高层所提取的特征作为送入下一层网络的输入。而FPN在前人的基础上提出自上而下的特征提取体系结构,通过调节不同尺寸特征图的大小,有效融合不同尺度特征图所提取到的特征信息,完成特征融合。以此实现对于大目标和小目标的更加有效的检测。
在进行车辆目标检测的过程中,摄像头经常会面临着较差可视角度以及远距离的车辆目标检测的情况。因此,实现图片的深层语义信息和浅层的外观信息的有效融合,可以提高对于图像或视频中车辆的识别效果。
在对车辆目标检测的任务中,主要采用的是卷积神经网络作为骨架的一阶段或是二阶段目标检测算法,对于小目标车辆的检测,采用特征融合的方式,加强所需要提取的物体的信息。本文介绍了传统目标检测算法,基于卷积神经网络的one-stage目標识别算法,two-stage目标识别算法及提高识别效果的特征融合方法。
在智能交通监控摄像头下进行车辆目标检测任务中,由于传统的目标识别算法使用滑动窗口的方式获取相应的目标对象,需要在整张图像上进行滑动搜索,检测的速度会逊于使用基于卷积神经网络的目标识别算法,因此采用基于卷积神经网络的目标识别算法。采用one-stage目标检测算法,可以在更短的时间内获取所有出现的目标对象,但是相对精度较低,使用two-stage目标检测算法,可以实现较高精度的目标检测效果,但是时间慢于one-stage检测算法。因此需要进行进一步研究在不同的情境下相对更优的算法。同时,基于卷积神经网络的特征提取网络,虽然相较于传统算法,可以获得更加深层次的语义信息,但是仍然存在着卷积核相较于整张图像中较小的范围从而导致忽视了整张图的关联信息,以及庞大的参数量仍然影响在实际应用中的检测速度的问题。因此更加理想的组合模型势必需要广大研究者们的推进与探索,从而针对特定问题设计鲁棒性更强的车辆目标检测算法。
作者单位:北方工业大学
