水电智能化技术特征解析及工程实施映射
2022-07-17崔青汝
梁 庚,李 文,崔青汝
(1.华北电力大学控制与计算机工程学院,北京市 102206;2.国能智深控制技术有限公司,北京市 102209;3.北京市电站自动化工程技术研究中心,北京市 102209;4. 国电新能源技术研究院有限公司,北京市 102209)
0 引言
当期我国的水电智能化建设正处在蓬勃发展阶段,具备一定智能化水平的水电站数量也在逐渐增加。但当前新建智能水电、现有水电智能化改造方面仍存在一定的盲目性、跟风性、复制性和重复性的建设问题,并未完全做到因地制宜、按照智能化的本质特征去理解和指导智能水电的建设,存在着“只见树木,不见森林”的情况,在智能化建设上还没有完全建立起全局观,缺乏一定程度的理论指导。从出于实用性自发意识的智能水电建设阶段逐步过渡到基于对智能化特征本质把握的智能水电建设的自觉性阶段是当前水电建设中亟须解决的一个转型问题。因此从理论和实践相结合的角度对智能体特征进行深度解析,并与具体智能化建设实践相联系,形成映射关系,对于高效、灵活的智能水电建设具有积极的指导意义。
1 智能化技术的主要特征解析
智能化的实现基础是泛在感知,其主要特征表现为自学习、自组织、自寻优(自趋优)、自适应、自恢复。其中的“自”表示“自动”“主动”的含义,也即如果将拥有智能的实体看作是智能体,智能化即为其积极、主动地探索环境、改造自身从而适应所在环境的趋向和行为[1]。
智能化包括两层含义:一是与智能体相关的、由多个来自环境的约束变量构成的二维或多维约束空间;二是智能体自身的状态(或形态)。智能体处在约束空间中,且具备形态转换和变化能力,即“变形”能力。包含两层含义的智能化概念可由图1所示模型表示。

图1 智能化概念模型Figure 1 Conceptual model for the intellectualization
智能化的程度即智能体在约束空间中的位置问题,包括以下三种状态:
(1)智能化度低。此时上述智能化模型所表征的智能体的任何部分触及或超越约束空间均可看作是不满足部分约束条件的要求,或对环境不适应。
(2)智能化程度中。此时上述智能化模型所表征的智能体的任何部分均未触及约束空间边界,智能体状态满足全部约束条件,对环境适应,但并非处于最优状态。
(3)智能化程度高。此时上述智能化模型所表征的智能体的任何部分均未触及约束空间边界,智能体状态满足全部约束条件,同时智能体自身状态处于最优,体现为对环境高度适应。这三种状态如图2所示。
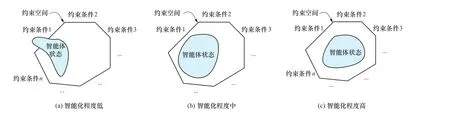
图2 智能化的三种状态Figure 2 Three states for intellectualization
上述智能化的三种状态并非静态的,而是一个动态的过程。由于智能体所处环境不断变化,导致约束空间形态也不断变化,因此智能体为了保证自身总是处在对环境的适应和优化状态下,就需要不断调整自身状态和行为。例如,图3所示为环境变化时一个高度智能化的智能体随环境变化调整自身状态的过程。
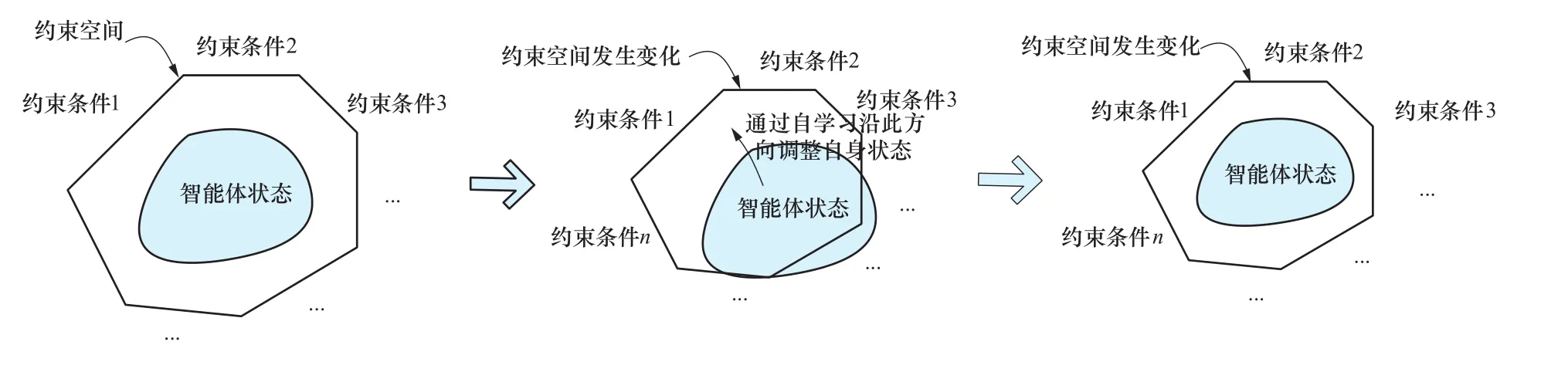
图3 高度智能化的智能体随环境变化调整自身状态的过程Figure 3 The adaptation process of intelligent entity with change of environment
在变化的环境中,这种行为越实时、越准确表明系统的智能化度越高。
有时智能体自身局部故障会导致状态发生变化,此时会形成如图4所示的“穿刺”状态,即智能体故障导致形变穿出约束空间。有些时候为了保障运行的安全性,需要人为修改环境因素或参数来使约束空间变化,从而使局部故障的智能体能够仍然处于约束空间内,如水电站的负荷分配及负荷指令处理操作就属于这一类修改环境参数和智能体相适应的情况。
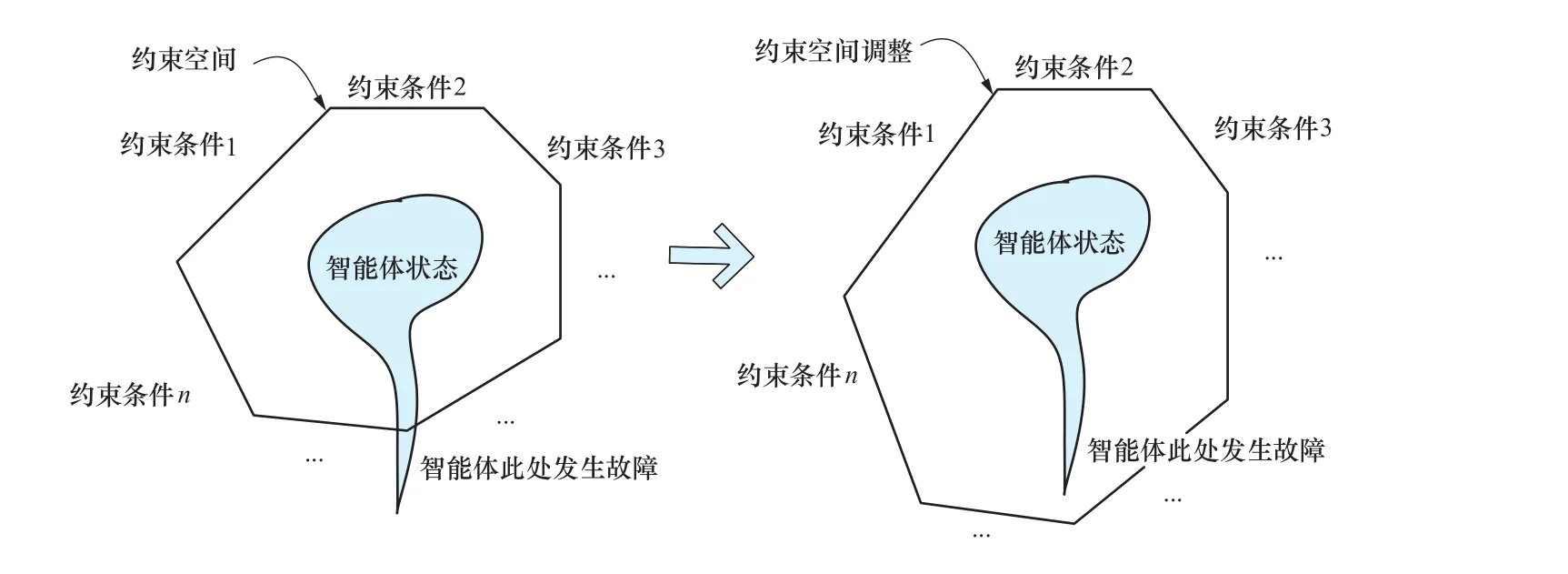
图4 智能体局部故障导致的“穿刺”状态及约束空间的调整Figure 4 Penetration states caused by partial faults from intelligent entity and the re-arrangement of constraint space
在一个控制系统中,控制器和被控对象共同构成了智能体,被控对象是智能体的实体部分,控制器是智能体调整自身形态——实施“变形”的决策者,控制系统的执行机构是智能体“变形”的执行者。生产过程或系统中的阀门开度变化、截阀开闭、设备启停等,都是智能体实施“变形”的重要形式。
1.1 泛在感知
智能体要调整自身状态以适应环境变化,必须对环境和自身状态有非常好的了解和掌握,这可以通过泛在感知技术来实现。如图5所示。通过遍布式的泛在感知,智能体可以获得环境信息和自身状态信息,并掌握自身状态与约束空间边界的距离,从而为调整自身状态提供最基础的依据。
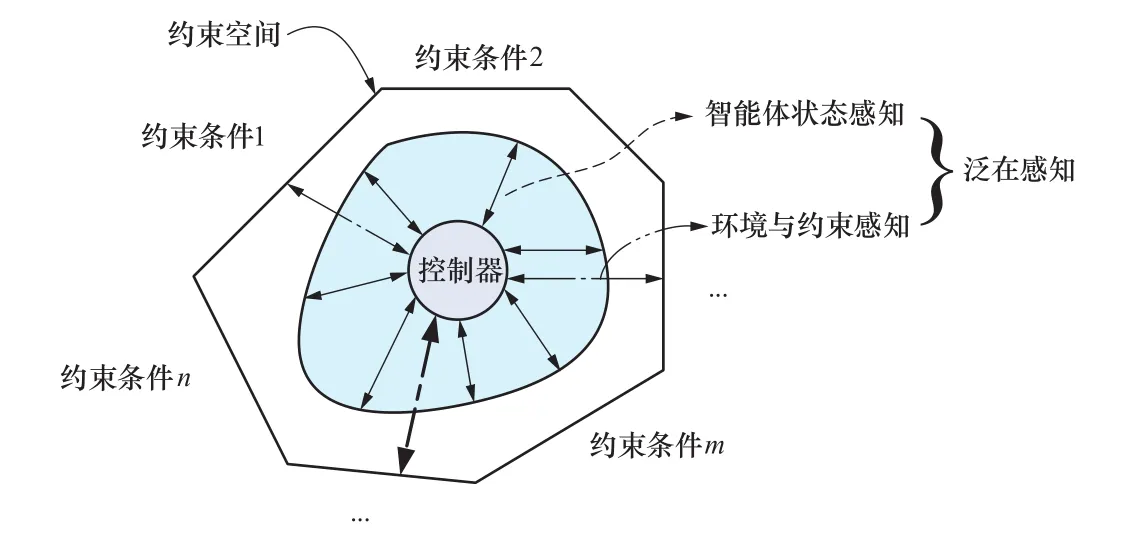
图5 智能化中的泛在感知Figure 5 Ubiquitous perception in intellectualization
1.2 自学习
自学习是智能化实现的一种重要手段,是智能体构造或不断增强输入输出映射集(规则集)的过程。如果将输入输出映射集看作是智能体的知识,则自学习就是智能体“获取知识”或“增长知识”的过程。智能体的智能化程度在很大程度是体现在输入输出映射集,也即知识集是否完备和精确方面的。例如专家系统中的“IF-THEN”规则条目和模糊控制中的模糊规则的定义,都属于知识。如果规则集(知识)是智能体通过某个过程逐渐获得的,则认为该智能体具有自学习能力。控制系统中的某些控制器的控制参数是人为设定的,且设定后不能在线修正,则认为该系统不具备自学习能力,例如传统的PID控制器。在自学习过程中,包括有导师学习的模式和无导师学习的模式。又如神经网络中的深度学习采用多个神经网络隐含层来存储规则,在自身状态调整上精度更高,学习的结果也更为准确。半监督学习和增强学习在宏观上也可划分到有导师和无导师的学习模式中。导师监督学习是将导师的输入输出映射集(知识)传输(传授)给智能体的过程;无导师学习中没有现成的输入输出映射集(知识)可供传输给智能体,需要靠智能体自身的“尝试”“试错”来不断扩充和完善输入输出映射集。
1.3 自寻优
如果说自学习更强调的是一个过程,自适应、自寻优则不但包括过程而且更注重结果。自适应、自寻优在范畴上比自学习更大。自学习是构建知识库(规则库),是自适应、自寻优实现的一种手段。但自适应、自寻优的实现不一定使用规则库,即不一定使用自学习机制来实现。自适应、自寻优还可以包括其他手段,比如直接使用某种模型来进行寻优操作。自寻优在实现手段上既可以通过自学习获得规则库使用类似查表的形式实现,又可以按照某种既定的优化准则来进行动态计算控制量从而调整智能体自身状态的,这可以被认为是某种规则库的解析式化。
自寻优可以描述为:当已知条件(或称为环境信息)发生变化时,为了保持最优的控制指标,控制量需相应地变化,以动态地维持指标为一个相对不变的最优值,这是一种“以动制动”思想的体现。自寻优可以看作是在现有的可包围指标点的已知条件集下通过运算衍生出新的数据,构造新的已知条件集,缩小已知条件集与指标点之间的空间,从而逐步达到指标点的过程。自寻优的过程可如图6所示。

图6 自寻优的过程Figure 6 Process of self optimization
常用的自寻优算法有遗传算法(GA)、粒子群算法(PSO)、蚁群算法、果蝇算法(FOA)等。
1.4 自适应
自适应与自寻优具有一定程度的相似性。但智能体自适应的最终形态不一定是最优的,与自适应所设定的指标有关。智能体的自适应通过确立的控制指标和不断获取当前自身状态来相应调整自身状态来趋近于既定指标。例如自适应控制中的对象参数的在线辨识,就是智能体获得自身状态信息的一种途径。自寻优可以看作是以某种最优指标为目标的自适应。在自适应状态下,从某种角度或从某个指标评价来说,智能体自身状态是“合理的”,但可能不是“最佳的”。
1.5 自组织
智能化特征中的自组织与生态系统中的自组织具有共通之处。生态系统中各种生物通过食物网联系并与环境相融洽。就像各类生物一样,进化成最适应环境的形态。哈肯(1979)对自组织现象描述为“所有子系统之间的相互作用对整个系统的贡献好像是有调节的、有目的地自组织起来的”。“组织”可看作是事物的相关元素的交互、融通的过程。自组织的过程可理解为在一定条件下系统自动地由无序走向有序、由低级有序走向高级有序的过程。智能体内部各部分自动协同达到适应或优化的状态就可以看作是一种自组织的形式。例如电站控制中的协调控制可看作是自组织的一种形式。智能体的自组织过程如图7所示。
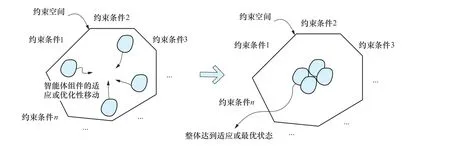
图7 智能体的自组织过程Figure 7 Process of self-organization for intelligent entity
1.6 自恢复
自恢复可理解为自动重建。系统的自恢复也就是系统自动重建的过程。“恢复”是与“破坏”相对的,破坏是一个从有到无的过程,而恢复则是一个从无到有的过程。因此,要实现从无到有,需有“冗余”或“备份”机制作为基础。现有的被破坏了,可以使用冗余的或备份的来重建。冗余或备份是自恢复实现的根本机制。自恢复的程度主要取决于数据冗余和备份的程度。
2 智能化技术特征元素相互关系
智能化技术的五个特征中,自学习是实现自适应与自寻优的基础,但不是唯一途径。自适应与自寻优(自趋优)较为相似,当确定的优化目标不同时,表现为自寻优和自适应。自适应也是确定了某个适应性目标值的前提下来调整智能体自身状态,适应当前的应用需求或应用场景(约束空间)。自组织是智能体多个组成部分的协同,从而从整体上达到适应或最优的过程。自恢复也是以自学习、自组织为基础的,只有具备了自组织的能力才能在系统受到破坏时(例如通过自学习获得的相关输入信息元类型及影响权重等数据丢失等)通过自学习、自组织重构系统。智能化技术特征元素相互关系如图8所示。
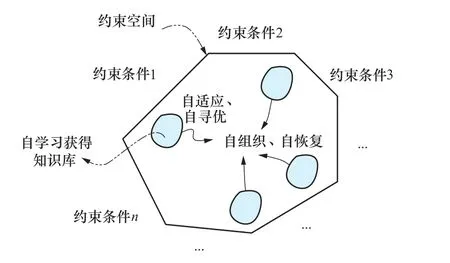
图8 智能化技术特征元素相互关系Figure 8 Correlation between feature elements in intellectualization
3 基于智能化特征的水电智能化技术映射
下面以水电智能化中已实施或可能实施的几种技术为例说明智能化特征的映射关系。
3.1 梯级水电站负荷智能调度
梯级水电站负荷实时调度不仅与电力系统紧密相连,还与水库的水情息息相关,需综合考虑电网、水库、机组等多方面的约束。水电电站负荷分配策略主要以总耗能最小模型或上下游流量匹配的水位平稳模型为主。这种应用属于对约束空间进行修正来符合电站智能体的状态信息。构成约束空间的约束条件主要包括安全性(调频、调峰、运行水位、最小泄流量等),经济性(有无弃水、流域耗水率、机组调节次数等)。在这种应用中,通过改变水电站这一智能体的约束空间的方式来间接起到智能体自适应、达到智能体调整自身在约束空间中位置的目的。这种应用属于智能体间接性自适应、自寻优的范畴。
3.2 设备管控、状态监测和故障诊断
设备管控、状态监测是水电站智能体主动、实时获取自身状态的一种有效手段。智能体了解自身状态后,结合约束条件就能够很好地了解自身在约束空间中的位置,从而调整自身状态,达到适应性或最优性。设备故障诊断当水电站智能体发生或接近发生“穿刺”情况时,及时消除智能体自身出现的“毛刺”、调整自身状态已达到对约束空间的适应性。主体属于智能化中的泛在感知范畴,与智能体的自适应特征具有密切的联系。例如多系统/多设备智能联动、基于机器人技术的设备智能巡检、设备智慧检修等也都属于此类型。再如流域级的设备管控平台通过各电水电站综合数据平台全面获取生产设备综合数据,形成流域“云数据中心”,为设备分析诊断提供大数据支撑,形成更大规模的自适应。
3.3 智能安全管理
智能安全管理通过智能安全装备采集现场人员和设备数据。除了设备作为水电站智能体的主要实体之外,运行人员也是水电站智能体的重要组成部分,也影响到水电站智能体的状态和在约束空间中的位置。智能安全管理通过智能安全帽、安全梯、安全带、视频监控、无线传感等手段获取水电站各类运行人员信息,如同对设备的监控一样,形成对智能体自身状态的监控。主体属于智能化中的泛在感知范畴,与智能体的自适应特征密切联系。
3.4 智能化评估
智能化水平评估方面,在基本层面上可以按照前文所述的三种智能化状态来进行评估,即由智能体与约束空间相对位置所决定的智能化程度低、中、高。在评估智能化中级以上水平时,可以进一步依据优化的效果,比如生产效率、成本等指标,也即智能体在约束空间中的位置是否为最优。
4 结束语
智能化是当前水电建设的主要方向。智能化的基本特征在智能化应用中有着具体的体现。同时,对智能化特征和本质的理解、掌握对智能化在水电工程中的设计和应用具有积极指导作用。未来的智能化水电建设可以在满足实际需求的同时,依据泛在感知、自学习、自适应、自寻优、自组织、自恢复的基本特征来组织和实施。对于目前在建的部分智能水电则可在对其现有智能化特征进行评估的基础上从多个特征角度进一步完善,做到有的放矢、点面结合、全面推进,做到“既见树木,又见森林”,以智能化技术特征为主线,把握好局部与全局的关系,实现机组级、场站级、流域级从小到大范围的智能化覆盖。