港珠澳大桥沉管隧道最终接头合龙口状态测量
2022-07-16锁旭宏刘国辉张德津管明雷
锁旭宏,刘国辉,张德津,3,管明雷,4
1)中交一航局第二工程有限公司,山东青岛 266071;2)广东省城市空间信息工程重点实验室,广东深圳 518060;3)深圳大学建筑与城市规划学院,广东深圳 518060;4)深圳职业技术学院人工智能学院,广东深圳 518055
港珠澳大桥集桥、岛、隧于一体,东连香港、西接珠海和澳门,是具有国家战略意义的世界级跨海通道.大桥隧道沉管段全长5 664 m,由编号E1—E33 共33 个管节和1 个特制的最终接头组成,属于外海超长沉管隧道,是目前世界上综合难度最大的沉管隧道之一.隧道施工采用从东、西人工岛向中间沉放对接安装的方式.E1—E29管节从西人工岛向东沉放安装,E33—E30 管节从东人工岛向西沉放安装,利用最终接头将两条安装线路的末端管节E29和E30连接,最终贯通形成一条完整的海底隧道[1].因此,最终接头的成功安装对隧道工程至关重要.
在E29和E30管节安装结束后,两个管节中间会形成一个凹槽作为最终接头的安装位置,这个凹槽称为“合龙口”[2].最终接头需要根据形成的这个合龙口的状态数据进行设计生产和安装.合龙口状态测量是利用端面方位角、竖向倾角、横向偏差和里程偏差,通过测量E29和E30沉管对接端面的标识特征点,进而精确推算整个对接面的位姿,为最终接头设计生产和沉放对接提供参数[3].当前国内外通常采用贯通测量的方法调整合龙口状态和获取合龙口状态参数,依据合龙口状态参数设计生产和安装最终接头.在贯通测量方法中,测量人员需要进入隧道内测量,测量工作效率低、耗时长;已安沉管隧道位姿不稳定、且测线长,导致贯通精度可靠性差;贯通测量在合龙口状态形成后进行,再基于测量结果调整合龙口状态,导致整体施工难度大[4].
针对合龙口状态测量存在的问题,本研究提出合龙口状态实时测量方法,设计了测量塔法和人孔井投点法两种合龙口状态实时测量方法,在港珠澳大桥沉管隧道合龙口状态测量进行了实验,并与传统贯通测量方法进行精度对比,分析了3种方法的各自的适应性,为港珠澳大桥沉管隧道最终接头合龙口状态提供了最优测量方案.
1 合龙口状态测量原理
管节预制和沉放施工阶段分别建立有管节坐标系和工程坐标系,管节坐标系以管节中轴线为x轴方向,以垂直于中轴线方向为y轴方向,以对接端起点为原点o,如图1.工程坐标系在施工控制网内以待沉管节理论沉放位置为基础建立,贯通测量后修正的待沉管节方向为x轴方向.在管节预制场采用控制网测量管节上特征点在管节坐标系下的坐标,依据设计参数换算o点在工程坐标系下的坐标,并确定管节在工程坐标系x轴方向后,管节特征点就能相应的换算到工程坐标系.因此,管节沉放对接相当于管节坐标系o-xyz平面在工程坐标系中的旋转和平移,按照设计参数准确沉放完成后管节坐标系o-xyz坐标系与工程坐标系重合.

图1 沉管管节坐标系Fig.1 Immersed tube coordinate system.
管节坐标系的x轴根据管节中轴线确定,管节中轴线依据管节端面特征点的平面测量结果进行计算选取.管节轴线示意图见图2.其中,S1表示管节的对接面,S8表示管节的非对接面,S1-1至S1-8为人工标识的均匀布设对称的特征点.以4对对称特征点中点S1-12、S1-34、S1-56和S1-78的中心作为管节对接面的中心点S1-M,同理,标记非对接面的中心点为S8-M. S1-M 和S8-M 两点的连线为管节的实际中轴线,实际中轴线在管节底面的投影为x轴. 管节实际中轴线示意图见图2.
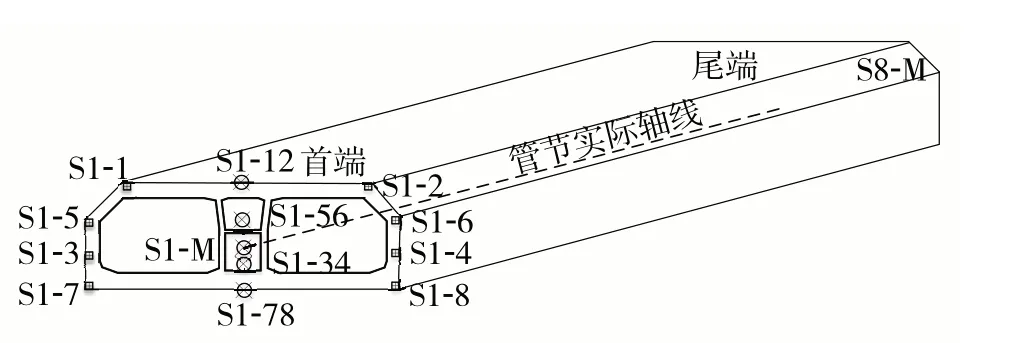
图2 管节轴线示意图Fig.2 Schematic diagram of the axis of immersed tube.
以水平状态下管节底面所在水平面为xoy平面,以合龙口底边线理论中点为原点o,管节端面中心点连线所在竖直平面为yoz平面(图3).E29 和E30管节坐标系x轴以指向右行车道为正向(沿着S8向S1方向分左右行车道),y轴以指向S8端为正向,z轴以竖直向上为正向.E29管节坐标系示意图见图3(a),E30管节坐标系示意图见图3(b).

图3 管节坐标系平面示意图 (a)E29;(b)E30Fig.3 Coordinate system of immersed tube of(a)E29 and(b)E30.
管节预制完成后,基于预制场控制网测量管节端面特征点的管节坐标P(x,y,z),基于设计参数计算管节端面底边线理论中点o在工程坐标系的坐标o(x0,y0,z0),姿态传感器测量管节横向倾角为α,管节纵向倾角为β,管节轴线方位角(首尾中心点连线)为γ,则可以计算待测点P在工程坐标系的坐标P(x1,y1,z1).为了获取合龙口状态参数,需要先测定管节特征点,再根据特征点标定成果推算管节端面的姿态,为此需要确定管节坐标系与工程坐标系转换关系.管节安装完成后,可以测定管节坐标系与工程坐标系的转换关系[5],转换关系如式(1)所示.

其中,x、y和z为管节上任意一点在管节坐标系中的坐标,x1、y1和z1为该点在工程坐标系中的坐标.x0、y0和z0为管节坐标系与工程坐标系间的平移量,α、β和γ为管节坐标系与工程坐标系间的旋转角.x0、y0、z0、α、β和γ合称为管节坐标系与工程坐标系的坐标转换参数.
通过测量推算合龙口E29和E30管节对接面多个特征点,得出合龙口的状态数据,进而获得合龙口特制最终接头的生产设计与安装参数.从端面特征点坐标公式分析,影响端面特征点P坐标计算的主要因素为端面特征点管节坐标P(x,y,z)、管节端面底边线理论中点o工程坐标o(x0,y0,z0)、管节横倾α、管节纵倾β和轴线方位角γ的测量精度.
2 合龙口状态测量
E29 和E30 管节安装完成后,在E29 尾端外侧端面S8 与E30 首端外侧端面S1 形成合龙口.合龙口两侧管节端面底边线中点距离称为合龙口宽度,两侧管节端面在工程坐标系中的空间姿态为合龙口姿态,隧道合龙口示意图请扫描论文末页右下角二维码见图S1.
为了测量和调整合龙口状态,在水下沉管安装工程实践中,可以通过测量塔法、人孔井投点法以及贯通测量的方法进行.
测量塔法是在最终接头两侧管节沉放过程中,通过管顶测量塔上安装的全球导航卫星系统(global navigation satellite system,GNSS)设备和管节内部安装的姿态传感器测量管节的位置和姿态,实时计算合龙口的状态参数. 该方法在管节沉放过程中可获取合龙口的状态参数,对合龙口状态进行调整. 但是,管节在沉放过程中的形变、测量塔自身的变形等因素会影响合龙口参数的测量精度.
人孔井投点法是指合龙口两侧管节顶部预留有人孔井,人孔井投点法通过在管节顶部前后两个人孔井底盖板上安置天顶天底仪,在人孔井顶部架设的GNSS 设备获取同轴点工程坐标,在管节内部人孔井正下方架设天顶天底仪进行同轴管内投点,结合管节内部姿态传感器提供数据计算合龙口的状态参数. 该方法在管节沉放结束即可获取合龙口的状态参数,对合龙口状态进行调整.其精度主要受GNSS测量精度影响.
贯通测量法是在沉管安装后利用全站仪、水准仪等设备进行隧道贯通测量,将隧道外工程坐标引入到隧道内,计算合龙口的状态参数.该方法耗时长,也可能需要多次测量[6],且无法实时调整合龙口状态,导致整体施工难度大.
2.1 测量塔法状态测量
测量塔法利用管顶两个测量塔顶部安装的GNSS 设备,结合管节内部安装的姿态传感器测量管节位置和姿态,实时解算管节坐标系与施工坐标系的转换关系[7],依此计算沉管端面特征点的实时位置,确定管节实时三维参数,对合龙口两侧两个端面的三维测量数据建模,实时得到合龙口的状态参数[8-9]. 测量塔法状态测量原理请扫描论文末页右下角二维码见图S2.
特征点坐标计算公式[10]为

其中,xold、yold和zold是通过标定得到的特征点在管节坐标系中的坐标;Tx、Ty、Tz、ωx、ωy和ωz是通过GNSS 设备及管内姿态仪的数据计算的管节坐标系与工程坐标系之间坐标转换参数;xnew、ynew和znew为特征点在施工坐标系中的工程坐标;m为尺度参数.
管节舾装时,测量塔与管节的关系会在浮态下进行标定[11].依据多次实测结果,测量塔参考平面的坐标分量中误差为20 mm,高程中误差为50 mm.在沉管安装过程中,GNSS定位参考平面坐标分量中误差为20 mm,测量塔形变等其他因素引起的平面中误差为10 mm,GNSS 定位高程中误差为30 mm,采用测量塔法解算E29S8 和E30S1 端面特征点,二者影响误差因素一致.基于影响误差,计算E29S8 和E30S1 端面底边线理论中点o(x,y,z)的测量中误差mx0、my0和mz0分别为30、30和58 mm,管节轴线方位角测量中误差mγ为0.016 21°,横倾误 差(mα)、纵 倾 误 差(mβ) 分 别 为0.058 0°和0.050 4°.E29S8 和E30S1 端面测量方法一致.将以上误差分析结果代入式(1),计算端面特征点各分量中误差.
采用测量误差传播方法计算端面坐标点测量精度,

其中,z是关于变量x的函数;mz是函数z的中误差;xn为第n次测量值;mn为第n次测量值中误差.计算得到端面点坐标测量结果的精度为:mx的中误差为32.5 mm,my的中误差为32.1 mm,mz的中误差为61.3 mm.
2.2 人孔井投点状态测量
E29 和E30 管节管顶设计有人孔井结构.如图4所示,管节初步完成安装后,在沉管人孔井盖板上安置天顶天底仪,对中人孔井盖板上表面特征点ZD1,倒转天顶天底仪向人孔井顶部投点,移动顶部GNSS 天线使其与ZD1 同轴,通过GNSS 静态观测测定ZD1坐标.在管节内部人孔井正下方架设天顶天底仪,调整仪器位置并对中人孔井盖板下表面特征点ZD2(ZD2 与ZD1 同轴),使用全站仪放样,将所投点ZD2 放样在行车道地面上为特征点ZD3.依此方法完成人孔井投点,将平面测量基准引入管节内,完成管节平面位置测定.

图4 人孔井投点测量原理Fig.4 Measuring principle of hole casting.
在沉管安装过程中,GNSS 设备定位的平面坐标分量中误差为20 mm,对中误差(含测量塔摇晃和形变等)为10 mm,E29S8、E30S1 端面底边线理论中点o的测量中误差mx0和my0均为22 mm.人孔井投点法管节轴线方位角测量中误差mγ为0.010 07°,横倾误差(mα)、纵倾误差(mβ)分别为0.030°和0.006°.采用人孔井投点法解算E29S8、E30S1 端面特征点,二者影响误差因素一致.将误差分析结果代入式(1),采用误差传播方法计算得到端面点坐标测量结果为:mx的中误差为23.3 mm,my的中误差为22.3 mm,mz的中误差为32.0 mm.
2.3 贯通测量
贯通测量根据岛隧工程首级加密控制网控制点数据,进行洞外导线点测量,利用进洞导线测定管内贯通测量特征点.沉管隧道进洞导线平面控制网主要由洞外和洞内交叉双导线组成[12].洞外分别设置左右测站,采用3个已知点,多测回全圆测回法确定进洞方向,洞内左、右行车道上采用交叉双导线联系测量.同一车道内相同里程上的两个导线点之间的短边不进行观测,左、右车道交叉导线网联测通过外侧墙导线点进行联系,联测边如下图弧线示意[13],沉管隧道贯通面西侧(E29侧)控制网网形设计见图5 所示,沉管隧道贯通面东侧(E30 侧)控制网网形设计见图6.

图5 沉管隧道贯通面西侧控制网Fig.5 West survey control network of sinking tunnel.

图6 沉管隧道贯通面东侧控制网Fig.6 East survey control network of sinking tunnel.
贯通测量测定尾端端钢壳端面底边线理论中点o的流程如图7 所示.采用贯通测量控制点二等水准测量方法,管节首端贯通点SGT、管节尾端贯通点WGT 和设置在行车道上的用于测定管节横倾的高程特征点L1、R1、L2、R2 的高程.采用全站仪测定管节首尾贯通测量点SGT、WGT 的平面坐标.之后,通过SGT、WGT计算管节底板平面偏差及管节纵倾,通过L1、R1 计算管节首端横倾,通过L2、R2计算管节尾端横倾.

图7 贯通测量流程图Fig.7 The flow chart of the penetration measurement.
沉管隧道长距离进洞导线测量数据利用地面测量工程控制与施工测量内外业一体化和数据处理自动化系统按照设计的网型和测角、量边精度进行模拟计算[14],测角中误差取0.000 28°,测边中误差取所用仪器LeicaTS30的标称测距精度0.6 mm,比例误差是测距的百万分之一,得到西岛端导线网引起的横向贯通中误差为30.2 mm,东岛端导线网引起的横向贯通中误差为4.6 mm,贯通测量放样中误差x坐标取值为3 mm.受岛隧工程首级加密控制网测量误差、仪器误差、外业测量误差和坐标系系统误差等因素影响,按照1 mm/km的中误差估计洞内导线y坐标,E29S8端面y坐标综合测量中误差按照10 mm、E30S1端面y坐标综合测量中误差按照5 mm 进行计算,E29S8 端面高程测量中误差按照5 mm、E30S1 端面高程测量中误差按照5 mm 进行计算.端面底边线理论中点o(x0,y0,z0)的测量中误差分别为:mx0的中误差是30 mm,my0的中误差是10 mm,mz0的中误差为5 mm.
标定贯通点误差为5 mm,放样误差为3 mm,轴线方位角测量中误差mγ1为0.002 63°,mγ2为0.001 39°,mγ3为0.000 68°,mγ4为0.001 35°.由误差计算公式,E29S8 轴线方位角测量中误差mγ5为0.001 94°,E30S1 轴线方位角测量中误差mγ6为0.001 51°.横倾误差(mα)、纵倾误差(mβ)分别为0.030°和0.006°.E29S8(尾端)、E30S1(首端)端面进洞导线长度不一致.将以上误差分析结果代入式(1),采用误差传播方法可求得端面点坐标测量精度结果.其中,E29S8 的端面特征点中误差为:mx的中误差为31.0 mm,my的中误差为10.1 mm,mz的中误差为12.2 mm.E30S1 的端面特征点中误差为:mx的中误差为9.1 mm,my的中误差为5.2 mm,mz的中误差为11.2 mm.
3 测量方法对比分析
对各方法的测量精度评估结果见表1.对端面倾斜及方位的测量精度评估结果见表2.

表1 最终接头合龙口姿态点坐标测量精度评估结果Table 1 Evaluation results of coordinate measurement accuracy of final joint of sinking tunnel. mm

表2 最终接头合龙口姿态端面倾斜及方位测量精度评估结果Table 2 Evaluation results of the end face inclination and azimuth measurement accuracy of final joint of sinking tunnel.
表1 和表2 均是采用中误差获得的计算结果.1倍中误差概率为68.3%,2倍中误差概率为95.4%,3 倍中误差概率为99.7%.因此,本研究提出的两种合龙口状态实时测量方法均能达到合龙口状态测量的精度要求[15].3种测量方法具有以下特点:
1)测量塔法.该方法实时性最高,GNSS精度可靠,精度不受隧道长度影响,在合龙口形成过程中就可以对合龙口状态进行调整,一次性形成符合设计要求的龙口状态.但该方法不适合超大水深的测量,超大水深使得测量塔存在较大变形,导致测量精度大幅降低,数据不可靠.
2)人孔井投点法.该方法准实时、精度高,且精度不受隧道长度影响,在合龙口初步形成就可以获取合龙口状态参数进行调整.该方法也不适合超大水深测量,超大水深使得人孔井存在较大晃动,导致测量精度大幅降低.
3)贯通测量法.该方法简单、数据处理难度低、成本低,短隧道精度较高.但该方法实时性差、耗时长,且精度随着隧道长度增加而降低,先贯通再调整也给整体施工带来难度.
结 语
港珠澳大桥沉管隧道属于外海超长沉管隧道.针对当前合龙口状态测量存在效率低、耗时长、无法实时调整合龙口状态等问题,提出了测量塔法和人孔井投点法两种合龙口状态实时测量方法,并与传统贯通测量法对比分析,结果表明两种方法均满足合龙口状态测量精度要求,测量效率和可靠性相对于贯通测量法具有显著优势.将本研究提出的测量塔法和人孔井投点法应用于港珠澳桥合龙口形成过程,一次性形成合龙口.采用合龙口状态的最优组合测量方案,降低了施工风险,简化了施工流程,提高了施工质量,实现了港珠澳大桥海底隧道最终接头的安全设计生产与安装,最终接头两端与已沉管节横向相对偏差仅为1.8 mm.本研究提出的合龙口状态实时测量方法,改变了国内外沉管隧道施工中先形成合龙口状态、后贯通测量、再精确调整的施工方式,解决了超长沉管隧道最终接头合龙口高精度测量技术难题,为沉管隧道以及水下管道等大型水下安装工程提供了参考.
