基于FH控制器与PLC LINK通信技术的应用
2022-07-15李国林乔文远
李国林,乔文远
(中国电子科技集团公司第四十五研究,北京100176)
随着中国智能制造装备的产业升级,特别是国内半导体行业的快速发展,对中高端制造装备的性能与智能化提出了更高的要求。而图像定位装置是现在大部分半导体设备必不可少的组成部分,且随着设备性能要求的提升,也对相机数量及分辨率提出了更高的要求,为配合设备的运行速度,必须对高分辨率图像进行高速处理。
欧姆龙公司推出的FH系列图像控制器,在图像输入时间上做了大幅改善,机器组装更简单,可进一步缩短节拍让机器更高速,无需放慢机器节拍即可处理高分辨率图像超高速图像输入,利用新技术将使用频率高的搜索算法的处理速度提升至原先的数倍。此外,即使存在干扰光、重叠、反光、缺失等拍照条件下也能不降低速度地进行稳定搜索对象物,稳定性大幅提升。使用FH控制器凭借图像传输总线的“高速化”和“多线化”,可实现实时传输高分辨率相机或多台相机的大容量图像。FH系列控制器连接电脑或可编程控制器等外部设备时,利用测量命令的输入或测量结果的输出可实现对应的机械控制[1]。目前可利用FH控制器在不延长处理时间的前提下实现以往由于优先速度而舍弃的高精度测量。
本文主要介绍了FH控制器的系统构成、与外部装置的通信原理、控制方法、响应方式,以及通过PLC LINK与外部装置的通信方式,并设计了基于FH控制器的图像系统,应用到MLCC叠层机设备中。
1 FH控制器的系统介绍
介绍了FH系列图像控制器的工作原理、控制器和外部装置的通信规格[2]。FH控制器是通过对相机所拍摄的对象物进行测量处理的图像传感器,可与PLC或电脑等外部装置连接,从外部装置输入测量命令,或向外部输出测量结果。其系统构成结构如图1所示。

图1 控制系统构成结构示意图
外部装置(PLC等)与FH控制器之间的通信线缆主要采用以太网电缆、RS-232C电缆以及并行I/O电缆,而通信协议方式主要包括EtherCAT、EtherNET/IP、PLC通信、并行通信以及无协议通信。外部装置和FH控制器之间进行的数据交换,主要包含外部装置向控制器输入的命令和控制器向外部装置输出的数据。
1.1 FH控制器与外部装置的通信原理
在FH控制器和外部装置之间通信时,不限定连接对象,可按多种通信方式,通过通信命令开始测量,并输出数据的原理[2]。其通信原理如图2所示。
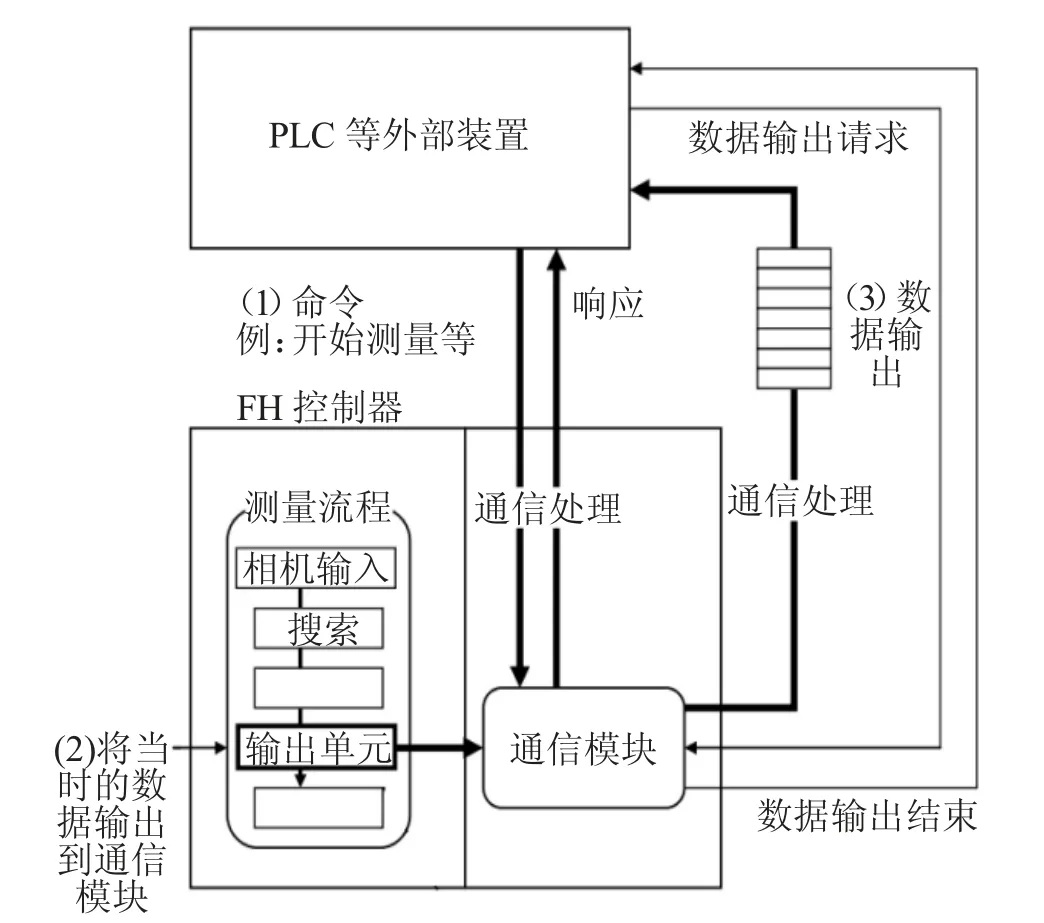
图2 FH控制器与外部装置通信原理示意图
(1)FH控制器在收到PLC等外部装置的命令后,将执行收到的命令,并向PLC等外部装置返回响应信号。(2)测量后的数据将通过测量流程中配置的输出单元(“结果输出单元”的简称)和通信模块输出。(3)输出测量数据的时间不是结束测量时,而是执行输出单元的时候。
如果需要输出数据,需要事先在测量流程中配置输出单元,可在测量流程中配置多个输出单元[3]。在输出控制中使用同步交换功能时,测量数据不会直接输出到外部,而是在通信模块中处于输出等待状态,直至收到来自外部的数据输出请求。
1.2 外部装置控制FH控制器的方式
用PLC等外部装置控制FH控制器的方式包括3种:
(1)利用控制信号、状态信号进行控制。利用控制信号、状态信号的ON/OFF,可控制FH控制器或确认其状态,适用于确认测量触发等基本动作、FH控制器的运行状态。将测量触发信号等作为PLC发出的控制信号输入,传感器的运行状态、判定结果可根据FH控制器传来的状态信号确认。如图3所示,①外部装置将打开STEP信号,输入测量触发;②FH控制器确认有STEP信号ON输入后,将向外部装置输出BUSY信号,然后执行测量;③FH控制器在结束测量后,会利用OR信号,输出判定结果。而控制信号、状态信号的种类包括输入信号(PLC→FH控制器)和输出信号(FH控制器→PLC)。

图3 外部装置PLC控制FH控制器的方式示意图
(2)利用命令/响应方式进行控制。将控制命令及其响应保存到PLC的I/O存储器中以进行控制。将PLC向FH控制器发出的控制命令,以及FH控制器向PLC返回的响应保存到PLC的I/O存储器中,交换命令/响应的控制信号。因此,无需由PLC发出通信命令等进行序列控制,即可对FH控制器执行单次测量、场景切换等各种控制。命令/响应方式中使用的存储区域主要包括用户写入对FH控制器执行控制命令的“指令区域”和用户读取指令区域中写入控制命令执行结果的“应答区域”。
如图4所示,PLC与FH控制器的通信流程:①PLC(用户)在事先指定的PLC的任意I/O存储区域(指令区域)中写入控制命令;②PLC(用户)将命令执行(EXE)位从OFF变为ON,向控制器发送控制命令;③控制器执行接收到的控制命令;④控制器在执行控制命令后,向PLC返回响应信号;⑤PLC(用户)将响应信号保存到事先指定的任意I/O存储区域(应答区域)中。其中控制命令因各通信协议的不同而异。
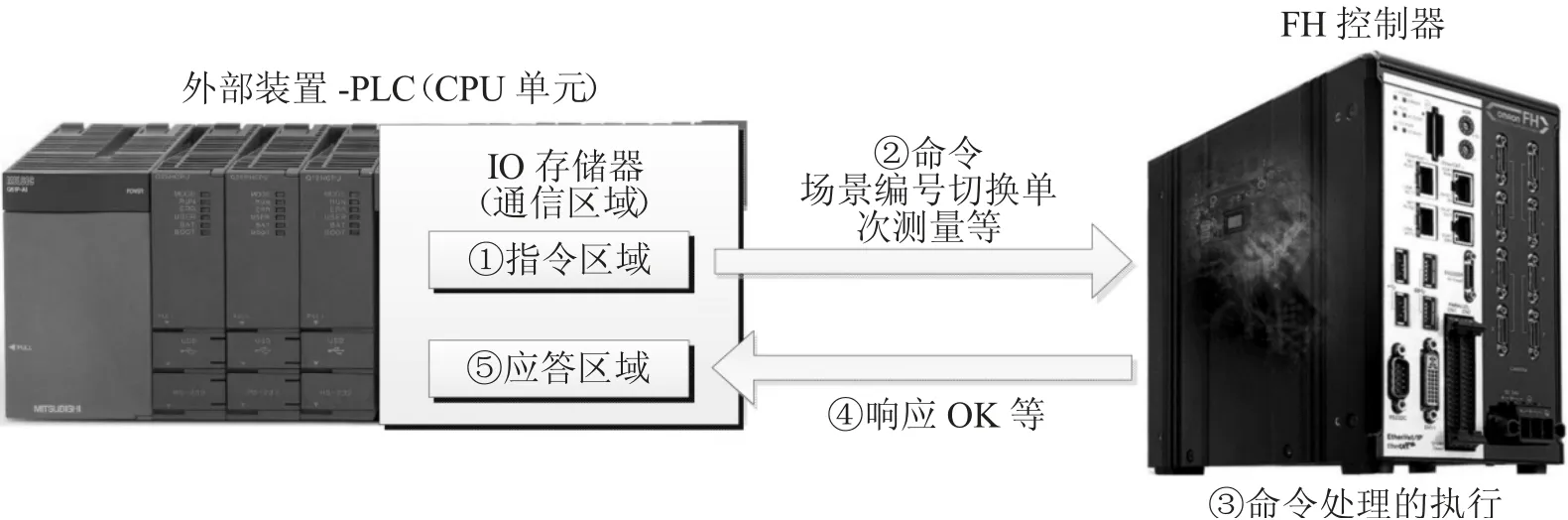
图4 外部装置PLC控制FH控制器的方式示意图
(3)测量后的数据输出方式。执行测量后,事先指定为输出对象的测量数据将自动输出到PLC指定的I/O存储器中。因此,无需PLC发出数据请求,即可将测量结果输出到PLC。
执行单次测量或连续测量后,将从FH控制器向PLC自动输出“事先指定为输出对象的测量中产生的数据”。因此,可以方便地将各处理项目的测量结果数据传输到PLC中。此外,仅在PLC端的可接收条件成立时,有同步交换时可以输出数据。根据外部装置与FH控制器之间的通信协议种类不同,数据的输出位置如图5所示。测量后的数据输出方式中使用的存储区域是执行测量后,FH控制器将测量产生的输出数据写入的区域,也就是数据输出区域。
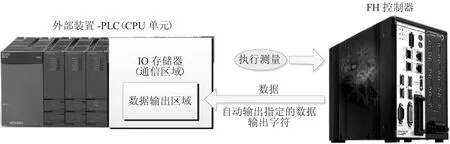
图5 外部装置PLC控制FH控制器的方式示意图
PLC与控制器的通信流程,事先指定执行测量后要输出的数据,以及PLC上保存数据的I/O存储区域(数据输出区域)。①执行测量;②执行测量后,事先指定的测量数据将保存到PLC的数据输出区域中。
2 FH控制器与PLC LINK通信
PLC LINK通信协议指将保存控制信号、命令/响应、测量数据的区域分配到PLC的I/O存储器中,通过周期性地共享数据,实现PLC和图像传感器之间的数据交换[2]。PLC LINK功能是一种使用指令区域、应答区域、数据输出区域3个连接区域进行通信的功能。FH控制器和外部装置PLC等之间进行通信原理示意图如图6所示。
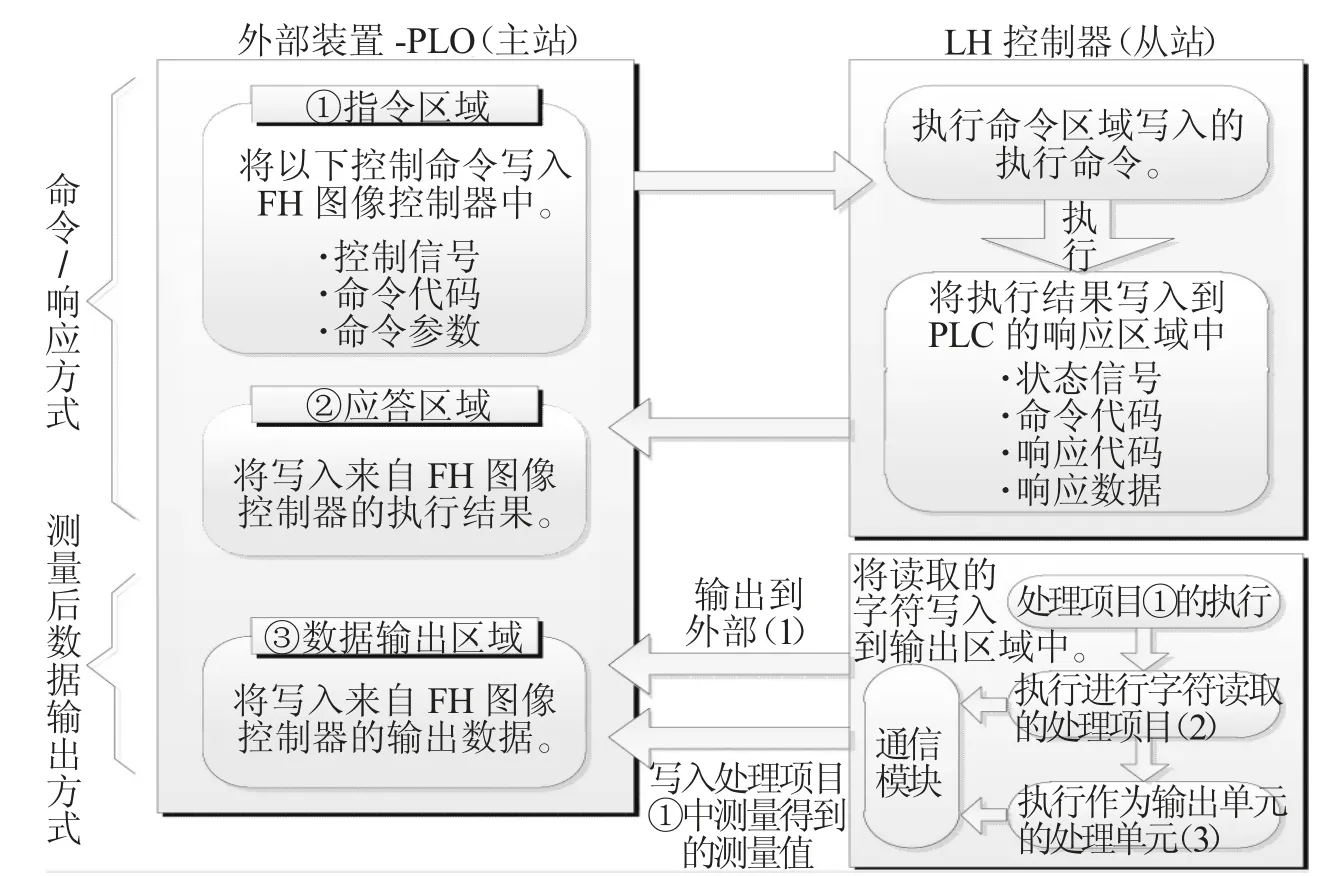
图6 FH控制器与外部装置的通信原理示意图
通信处理流程:利用PLC LINK,通过以太网或RS-232C/422,在FH控制器和外部装置之间进行通信。在PLC LINK中,可使用命令/响应由PLC进行控制,或在测量后输出数据,这两种操作可同时执行,需要在PLC上设定如表1所示的通信区域,进行与FH控制器之间的通信。

表1 在PLC上设定的通信区域
用户在FH控制器的通信规格设定中,设定“区域类别”和“地址”后,可将上述设定的3个通信区域分配到PLC的I/O存储器中。
(1)有同步交换利用输出控制,在PLC(主站)要求输出数据(DSA信号的ON输出)前,可以不从通信缓存中向外部输出数据。
(2)进行字符读取的处理项目包括字符检测、条形码、二维码、OCR等。
(3)关于输出测量数据的输出单元。
3 FH控制器与PLC LINK通信的实际应用
MLCC(Multi-layer Ceramic Capacitors)称片式多层陶瓷电容器是电子信息产业最为核心的元器件之一,除了具有一般瓷介电容器的优点外,还具有体积小、容量大、机械强度高、耐湿性好、內感小,高频特性好可靠性高等一系列优点。随着MLCC可靠性和集成度的提高,其使用的范围越来越广,现已广泛地应用于各种电子整机和电子设备,如电脑、手机、移动通讯、5G、程控交换机、精密的测试仪器,目前已经成为应用最普遍的陶瓷电容产品。
MLCC叠层机设备是MLCC生产制造工艺过程中极为重要的设备之一,到目前国内MLCC生产厂家的叠层设备主要依赖进口。而图像识别定位技术是制造MLCC叠层机的关键核心技术。现代工业设备对于图像控制系统的响应时间、响应速度、稳定性等性能指标要求越来越高,而欧姆龙FH图像控制器完全可以满足叠层机这种MLCC制造设备的生产要求。
本文所设计的基于欧姆龙FH控制器的图像控制系统主要由FH控制器、相机、PLC和被控对象(伺服电机)以及光电开关等组成,系统框图如图7所示。主要包括FH控制器图像识别过程和PLC控制XYθ轴电机实现对准的过程。其中图像识别过程是指FH控制器通过相机识别基片Mark点坐标的过程,并将图像识别后的偏差传给PLC,PLC再通过设定好的当量换算,计算出XYθ轴的位移量,从而控制电机运动实现图像对准的过程。图像控制系统的机械结构如图8所示,相机的安装必须垂直于基片工作台,工作台具有X、Y、θ方向的运动轴,每个轴都安装伺服电机及导轨丝杠连接机构。且工作台X轴与Y轴的导轨装置安装时应垂直,这样才能保证在图像对准的过程中,X方向与Y方向相互移动时不受干扰。
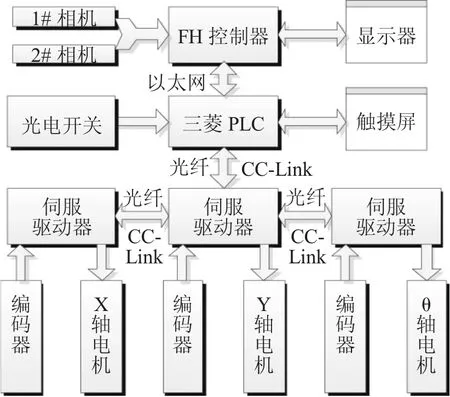
图7 基于FH控制器图像控制系统框图
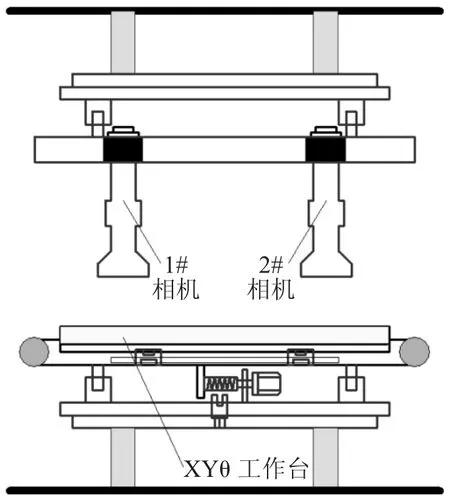
图8 FH图像控制系统的机械结构简图
根据系统设计的实际需求,实现FH控制器与PLC之间的顺利通信,在三菱PLC存储器分配指令区域、应答区域、数据输出区域相应的区域内存地址,如表2、表3、表4所示,且在D104区域设置场景号(0—自动、1—校准)。

表2 指令区域(三菱PLC→FH控制器)
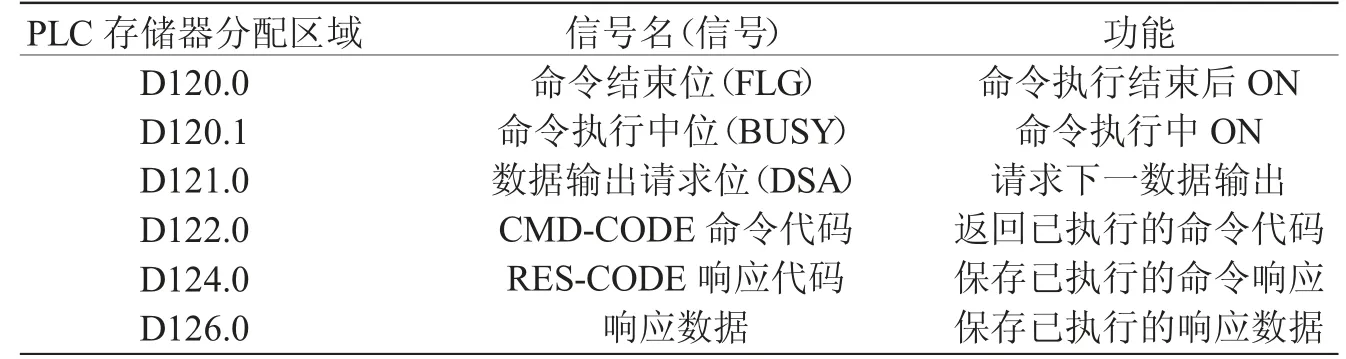
表3 应答区域(FH控制器→三菱PLC)

表4 数据输出区域(FH控制器→三菱PLC)
图像控制系统框图如图7所示,FH控制器外接显示器实现图像功能参数配置,并通过以太网通信实现与PLC之间的数据交换。三菱PLC通过CC-Link总线协议方式实现与伺服驱动器之间的通信,从而实现对伺服驱动器及电机的输出控制,实现基片Mark点的对准过程,并通过以太网模块与触摸屏连接通信,通过人机界面实现对控制系统的操作[4]。其中,各运动轴自身都通过编码器的反馈形成了一个独立的闭环控制系统。此图像控制系统已应用在MLCC叠层机设备的介质膜基片图像自动对准过程中,取得了非常好的应用效果。
4 结 论
本文主要介绍了FH控制器的系统构成、与外部装置的通信原理、控制方式,以及通过PLC LINK与外部装置的通信方式,并结合实际应用设计了基于FH控制器的图像控制系统,且将此图像系统应用在MLCC叠层机设备中,取得了较好的实际控制效果。随着MLCC的应用范围越来越广,FH图像控制系统也随其相关设备得到了应用和发展。本文对基于FH图像控制器图像处理技术的应用有着重要的意义,此图像控制器具有广泛的实际应用前景。
