城市轨道交通列车自主感知系统及关键技术研究
2022-07-15吴昊
吴 昊
(上海富欣智能交通控制有限公司, 201203, 上海∥高级工程师)
近年来,在我国核心技术自主化的倡导下,一批城市轨道交通信号企业已掌握核心技术,如FAO(全自动运行)已从DTO(有人值守的列车全自动运行)发展到UTO(无人值守的列车全自动运行),并得到广泛运用[1]。在此过程中,行业从业者一方面要面临城市轨道交通运营新需求、新场景的挑战;另一方面,得益于科学技术的快速发展,使行业从业者有机会采用新技术来解决新挑战。
本文从城市轨道交通列车运行控制系统的角度出发,面向FAO的新运营场景和需求,阐述自主感知系统及其功能;并结合具体项目应用,介绍该系统中涉及的关键技术。
1 城市轨道交通运营的新需求
城市轨道交通安全运营的核心是在一定环境条件下,实现设备系统与管理手段的高效融合,实现安全、高效、经济的运输。对FAO而言,运营列车上不再设置司机岗位,环境、设备系统和管理手段等的融合关系发生了变化[2-3],主要体现在:
1)运营环境。正常的FAO运营场景下,列车主要依靠机电系统实现运营,异常场景下则由机电系统和运营管理人员协同完成。上述模式的前提是在“封闭”路权下讨论“场景”。而在实际运营过程中,所谓“封闭”的运营环境只是一种假设,是依靠运营维护人员和司机在运营阶段共同监督完成。因此,FAO系统在运营阶段尚未能做到全线、全时段的实时监控,存在运行线路被障碍物“侵限”的可能性。
2)设备系统。一些特别繁忙和客流不均衡的线路,一方面需要车辆设备系统高可靠性运行,另一方面存在列车联挂运行等高级功能需求。综合考虑车辆设备系统实际运行的可靠性指标,以及公共交通运营中断对社会的影响等因素,往往采用预留降级系统方案实现后备运营,以降低车辆设备系统故障的影响。目前,后备运营系统方案采用点式方案,由于设备较多且系统较为复杂,相应的运营维护工作量亦较大。
3)运营管理。FAO系统的核心是降低运营管理要素中人的参与度,从而达到提升效率、降低成本的目的。这势必对车辆设备系统的可靠性和可用性提出更高要求。因此,列车需要在薄弱环节增加设备冗余和运营管理手段。在列车不再设置司机岗位的情况下,中心调度员缺少运营现场的联络员,无法有效掌握现场情况,存在监管盲区。因此,需在车端和地面设置相应设备系统,实现现场的监看和基本分析,解决缺少“现场联络员”的问题。
上述是城市轨道交通行业在新阶段、新时期亟待解决的问题。在此背景下,立足于行业技术发展路线和工业社会基础技术发展的机遇,提出城市轨道交通自主感知系统,以求从环境感知入手,提升车辆设备系统能力,从而解决城市轨道交通的新问题。
2 自主感知系统构成及关键技术
自主感知系统是指城市轨道交通移动载体(主要是列车车辆)和地面固定机电设施对周围环境信息的获取和识别。自主感知系统需通过各种传感器获取包括本车状态、设备状态、线路状况、延线标志等大量环境信息。自主感知系统对环境的感知,是帮助补充FAO系统对环境信息感知的不足,是加强运营指挥的重要手段。通过自主感知系统,可以实现以下功能:①运行环境中的障碍物检测;②运行环境中的侵限监测;③基础设施的检测与监督。基于以上功能,可以支撑后备运营、列车自主运行、列车辅助驾驶、在线编解挂等新的运营需求。
作为具有自主环境感知能力和对环境施加影响的自主感知系统,无论其属于移动端或地面,均包括传感器(组)、原始感知数据处理、感知数据融合、感知决策及感知输出等基本构成要素,如图1所示。这些要素形成自主感知系统的主要处理逻辑,并通过特定形式的输出反馈于城市轨道交通环境中,构成完整的闭环感知体系[4]。

图1 自主感知系统的基本要素构成Fig.1 Fundamental elements of autonomous perception system
2.1 传感器(组)
传感器(组)是自主感知系统的数据来源,负责对城市轨道交通环境进行多种形式的检测。目前,广泛使用的传感器包括摄像机类(可见光、红外等)、雷达类(毫米波、激光等)、定位类(全球定位系统,城市轨道交通专用定位信标、计轴、轨道电路等)、测速测距类(速度计、加速度计等)及环境监控类(液位、气体、温度等)等。根据不同的应用场景,同一类传感器可能配置多个,或同时配置不同类传感器构成传感器组,以实现数据冗余、延续和互补。
2.2 原始感知数据处理
原始感知数据处理通过接收前端传感器(组)传递来的环境信息,结合特定传感器的检测原理和设备规格,将原始环境信息转化为具备一定逻辑意义的初级感知结果。例如,摄像机传来的图像可被解释为包含特定种类的视觉目标,激光雷达传来的点云数据转换为结构化目标,等等。由于原始环境信息包含的信息量巨大,且不确定性强,实践中一般使用人工智能作为关键处理措施,通过大量数据的反复迭代和训练完善数据处理模型,实现对原始环境信息的充分解析和利用。
2.3 感知数据融合
感知数据融合是自主感知系统的关键处理环节。不同的初级感知结果被用于数据融合,形成对城市轨道交通环境的完整、有效并有一定冗余度的复合感知结果。感知数据融合的主要思路是基于数据本征的相似性(前融合)或互补性(后融合),将不同源的数据进行对齐(如时间同步和空间对准)、拼接(如将多块局部数据合并为完整数据)和补充(如补齐缺失的目标属性等)。
2.4 感知决策
感知决策是在复合感知结果的基础上,根据场景特点和用户要求,以自主感知为主要依据,判定对城市轨道交通运营系统和运营人员的影响和反馈。感知决策主要包括提示和控制两类。提示类决策用于判定感知结果应如何使运营与操作人员、交通参与者知晓,并引导其做出及时、合理和安全的行为。控制类决策用于判定感知结果如何使机电设备动作(如车辆加速或制动、信号机灯色切换、道岔开向等),以规避运营风险、提高行车效率。感知决策主要面向城市轨道交通运营需要,故其决策逻辑不仅需要考虑自主感知系统自身的能力,也需要兼顾城市轨道交通实际运营工作的规程规范、人员的操作习惯、安全要求等。
2.5 感知输出
感知输出用于将感知决策的决策结果以客观形式反馈给人员、被控设备或环境。提示类决策一般输出给运营人员(是否输出给交通参与者,取决于其业务需要),输出手段多采用界面显示、声光提示等;控制类决策则输出给被控设备,输出手段包括网络报文、硬线电信号等。
2.6 与城市轨道交通环境的交互
自主感知系统在城市轨道交通运营场景下运行时,其输出会对环境造成影响。例如,若一列正常运营的列车发现障碍物,可能导致后续列车的运营时刻表变更;路面行驶的有轨电车根据路口拥堵情况动态调节自身车速,其自身的行驶又会使路口的通行状态发生改变,从而缓解或加剧拥堵等。自主感知系统通过与城市轨道交通环境的持续交互,不断确定城市轨道交通与社会交通、运营系统等协作的平衡点,从而能够在感知驱动下构成协作共生的交通和社会体系。
3 自主感知系统的工程实践
有轨电车是运行在路面上,具有半独立或开放路权(与社会交通混行)的一类城市城市轨道交通制式,车重大、车速快(旅行速度可达50~70 km/h)。其主要依靠司机目视驾驶,对行驶环境的监控提出了较高要求,需要利用先进的技术手段实现自主感知需求。结合上海富欣智能交通控制有限公司近年来在有轨电车司机辅助驾驶(障碍物检测)系统方面的研发成果,具体介绍自主感知系统的工程实践。
3.1 技术路线选择
自主感知系统面向有轨电车司机辅助驾驶的障碍物检测,其目的是判定列车前方是否存在影响行车安全的障碍物,为司机行车提供指导,减轻其行车压力,从而保障行车安全。在各种障碍物检测手段中,基于视觉的方法依靠相机获取图像数据,通过综合图像处理方法和深度学习模型对障碍物进行识别[5-6],具有成本低、速度快和定制灵活等特点。为此,采用基于视觉传感器融合的检测方法和系统解决该问题。该方法结合长、短焦相机数据建立大范围视场,通过深度学习模型对同步后的相机数据进行目标检测,并对结果进行数据融合;最后通过对轨道进行识别,以轨道作为限界,判断目标是否侵界危及列车运行。
3.2 自主感知系统及感知流程
用于障碍物检测的自主感知系统包括感知模块、车载主机(含处理软件)和用户/驾驶员界面3个部分,如图 2所示。感知模块对应第2.1节所述传感器(组),由不同规格的相机构成;车载主机负责执行所有传感器数据的独立处理、数据融合和决策输出;用户/驾驶员界面为感知输出的主要手段,用于向列车驾驶员进行前方路况提示。

图2 自主感知系统构成Fig.2 Structure of autonomous perception system
嵌入车载主机的感知软件,其处理流程主要分为4个模块:相机驱动模块,目标检测模块,数据融合模块及侵界判断模块。感知软件处理流程框架如图3所示。相机驱动模块用以获取实时的图像数据,长焦相机和广角相机结合使用可以分别解决远距离识别和宽范围识别的问题。同时为保证数据一致性,需对上述两路数据进行同步处理。目标检测模块以深度学习网络模型为核心,并增加测距模块,使模型原本的二维输出转换为带有目标距离的三维输出,并提供障碍物距离信息给驾驶员作为判断依据。数据融合模块通过相机联合标定获得参数,将图像数据进行匹配投影;并对比不同检测结果的重合度,过滤掉其中重复的检测结果。侵界判断模块通过对轨道进行识别,以轨道作为限界,对检测结果进行划分。
3.3 测试效果
试验以采集到的行人类障碍物图像作为测试数据集(数据集中包含有轨电车前方0~250 m距离内不同位置出现的行人图片),利用机器人操作系统(ROS)和Open CV软件编写测试程序进行验证。基本感知效果如图4所示。有轨电车与路面车辆同行,对于非侵界的车辆或行人的检测结果,若与侵界的检测结果输出一致,会影响司机判断。因此,对非轨道限界内的障碍物及侵界障碍物使用不同颜色进行标记。
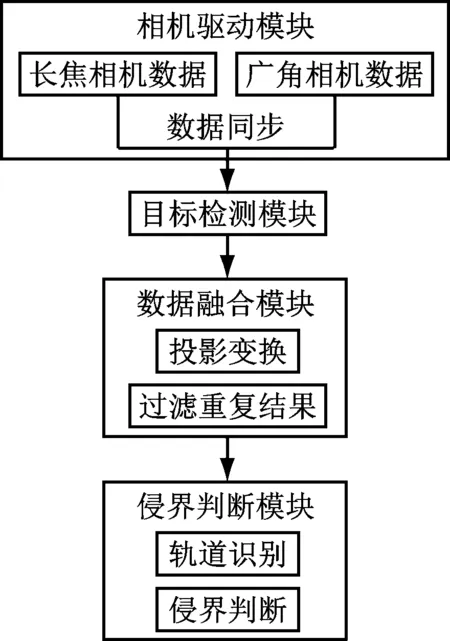
图3 感知软件处理流程Fig.3 Flowchart of perception software processing

图4 自主感知系统的基本感知效果Fig.4 Basic perception effects of autonomous perception system
通过对数据及集中图像进行感知处理和结果统计,得到总帧数、识别数/识别率、漏检数/漏检率误检数/误检率等一系列指标,如表1所示。从试验结果中可看出,自主感知系统在有轨电车前方200 m内的图像具有非常好的识别效果;而对于有轨电车前方200 m以外的图像,由于图像中的目标过小导致部分帧出现漏检,可通过优化模型、增加目标跟踪等措施进行改善。

表1 自主感知系统试验结果
4 结语
本文面向城市轨道交通列车FAO带来的需求与挑战,以现代传感器技术、人工智能技术与FAO系统的结合为基础,提出了城市轨道交通自主感知系统的概念与作用、系统体系、功能、构成要素及关键技术。将自主感知系统应用在有轨电车上,其实践结果表明,自主感知系统能够与有轨电车运营场景充分结合,能够有效发挥各种传感器和算法在环境感知中的优势,支撑运营系统提高安全性和运营效率,以进一步发挥城市轨道交通制式的优越性。
