经济型数控车床单立柱桁架机械手改造★
2022-07-14胡丽娜赵凤英张红丽
胡丽娜, 赵凤英, 张红丽
(青岛城市学院, 山东 青岛 266106)
引言
在“中国制造2025”“一带一路”的大背景下,结合中国工业现状来看,未来十年中国工业智能化领域的智能工厂分为两种,一种是传统的工厂转型成智能工厂,另一种是一出生就是智能工厂。而中国大部分加工制造业中小企业智能化程度需要有很大提升,主要是经济型数控机床的智能化改造的提升,这使得经济型数控车床进行智能化柔性化创新改造有着重大而深远的意义。行架式自动上下料机械手,运行速度快、寿命长、重复定位精高、夹料定位精准、机械手操作方便、产品易保养、故障率低、性价比高、是未来工厂升级改造的必要的组成设备。下面以经济型广州数控车床GSK980TD 进行单立柱桁架机械手改造,实现上下料自动化为例进行说明,为当前广州数控车床GSK980TD进行智能化升级改造提供一定的技术借鉴。
1 改造方案
通过对经济型数控车床的自动化改造,实现桁架机械手向数控车床的自动上下料。
如图1 方案布局图所示,该自动上下料单元由单立柱一拖一桁架机械手、广州数控车床GSK980TDC(液压卡盘、气动门)、上下料仓、手爪、电控系统组成。桁架机械手共有X、Z(横向、垂向)两个运动轴,由伺服电机拖动齿轮在齿条上传动,带动机械手爪的左右和上下运动以抓取工件。系统由PLC 控制,配置触摸屏用来设置运行参数、监控运行状态和人机交互操作[1-2]。

图1 方案布局图
机械手的上下料动作及数控机床液压卡盘的夹紧与松开由PLC 编程控制,气动门的开启与关闭及工件的加工过程由数控编程控制,机械手与数控机床的连接,通过机床PMC 与机械手PLC 编程制造。矩阵式料仓输送待加工工件到上料位置,桁架机器人爪抓取待加工工件,上升右移下降至到机床卡盘位置,取下已加工完成的工件,两气爪自动完成位置交换,将已加工完成的工件移至下料仓位置,下放松开手爪[3-4]。
2 具体实施
2.1 经济型数控机床系统的升级改造
广州数控车床GSK980TD 的系统更新至广州数控车床GSK980TDC,使数控车床的PMC 开放,具有可修改性。数控机床梯形图修改如图2 修改PMC 所示,将三色灯的地址改为机床端与机械手端的通讯对点,并在机床端增加M 代码,实现机床与自动门、卡盘、机械手的交互通讯。
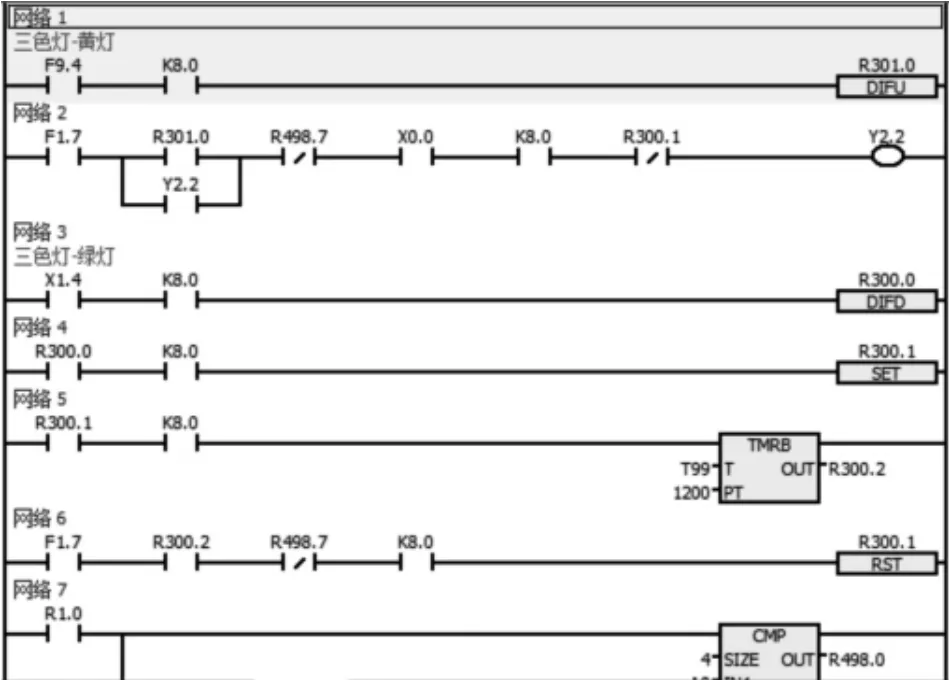
图2 修改PMC
2.2 经济型数控机床硬件的改造
手动装夹工件的卡盘改造为液压卡盘,用液压缸、电机、电磁阀控制其夹紧与松开。机床夹具有自动夹紧、松开功能,在机械手系统信号的控制下实现自动夹紧、松开功能以配合上下料动作;卡盘的夹紧与松开具有位置检测功能。卡盘松开时,工件夹持面一端的圆周和卡盘间的间隙大于1 mm。
手动防护门改造为气动防护门,用气缸、电磁阀控制其开启与关闭,具有对应的电控信号用于与机械手通信。
2.3 一拖一单立柱桁架机械手及上下料仓
单立柱式全自动上、下料机械手,主要包括底座、立柱、行架(伺服电机、联轴器、滚珠丝杠副、导轨、感应装置,行程开关);自动上下料系统的底座、立柱安装在机床的左手主轴箱的一侧,桁架安装在机床的顶部,与数控车床的Z 轴平行。为了提高桁架钢度,在横梁上安装小支架。机械手臂安装在桁架上,只执行上下运动,机械手爪直接夹持工件直径向数控车床卡盘送料,各轴单独运行,没有多轴累计误差,运行速度快,寿命长重复定位精度高。矩阵式料仓运用5×6,30 工位的自动上下料物料台,实现工件的输送。
2.4 机械手PLC 编程
桁架机械手的 PLC 控制运用西门子S7-200SMART 编程控造,包括程序块、料仓自动放料、料仓自动取料、手动回机械零位的运行、自动运用、坐标、手爪正摆、手爪反摆,实现机械手与机床、机械手与料仓、人机交互的操作。
人机交互触摸屏TPC7062Ti,可以实现机械手的机械回零操作、手动模式、自动模式、启动、停止、复位。可以手动进行气动手爪正摆、反摆、原料夹紧、原料松开、成品夹紧、成品松开、料仓复位、I/O 监控等操作如图3 所示。
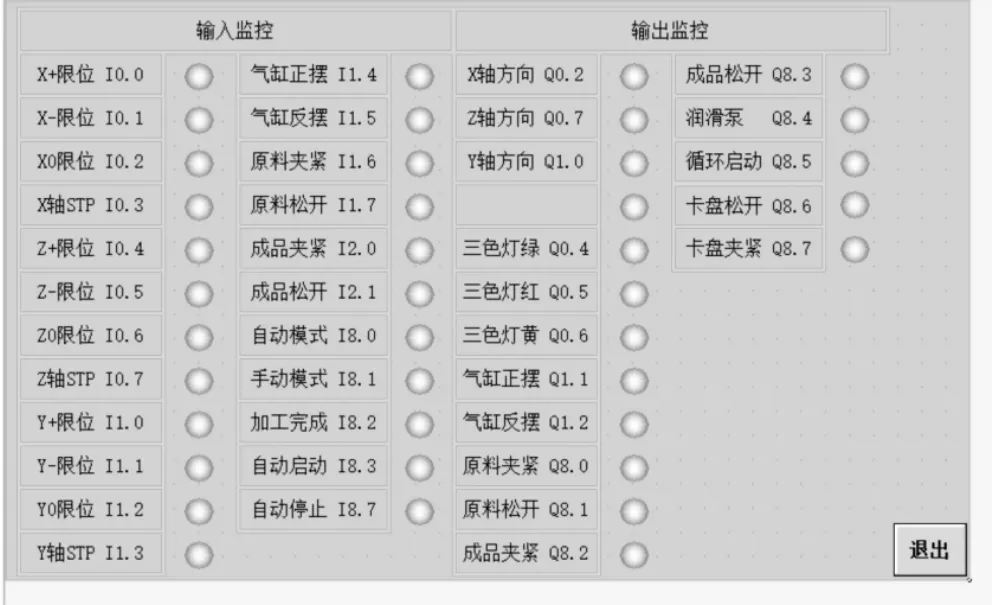
图3 I/O 监控界面
2.5 主要技术参数
桁架机械手实现X 轴横向移动,Z 轴的上下移动,Y 轴料仓的移动。机械手抓取能力为2.5×2 kg,X轴移动速0~30 m/min,Z 轴移动速度为0~30 m/min,重复定位精度为±0.05 mm,传动方式为齿轮齿条,驱动方式为伺服电机+减速机,控制系统为西门子PLC控制。现场环境要求:温度为-10~40℃;相对湿度(RH)为20%~90%;电源为三相380 V,频率为50 Hz;电压波动为±10%;压缩空气5 kg·f/cm2(滤除油、水);压力波动为±10%。
3 结语
经济型广州数控车床GSK980TD 进行单立柱桁架机械手改造,首先是进行数控机床PMC 的升级改造,使其具有开放性,即可修改性;再次是进行数控机床液压卡盘、防护门自动化改造;最后是桁架机械手与自动上下料仓的改造,由PLC 作为主控系统通过伺服驱动控制机械手在桁架上的移动,通过气动系统实现机械手本身上下、伸缩与手爪的夹紧、放松运动的控制。桁架机械手适用于加工工件的搬运、装卸,对提高经济型数控机床加工效率具有重要意义。
