无人机航摄与自动化识别在农作物灾害评估中的应用
2022-07-14来平军张传帅陈佳田俊辉马亚飞
来平军 张传帅 陈佳 田俊辉 马亚飞
(1.自然资源部第一地形测量队,陕西 西安 710054;2.自然资源部第一地理信息制图院,陕西 西安 710054)
1 引言
自然灾害对农业生产的影响十分强大,可导致农作物产量下降,品质降低。每年我国都会因为气象灾害的发生而出现严重减产和绝产现象。我国是一个农业大国,农民占全国人口的70%,农产品是很多农民唯一的经济来源,一场严重的自然灾害,夺去的可能是他们一年的收入。为降低自然灾害对农民造成的损失,灾害发生后第一时间评估农作物受灾程度,为政府相关部门提供数据支撑就显得非常重要。过去由于受到科技发展的限制,传统做法是通过灾后的人工实地走访调查来进行农作物灾害评估,该方法由于工作量大、周期长、评估精度差等,往往不能满足要求,因此急需探索出一套高效、高精度的评估方法。
近年来,无人机技术凭借高精度、低成本、操作简单等优势,被广泛应用到越来越多的场景中,利用无人机航测技术进行农作物灾害评估也成为一种新方法。本文结合某一应急项目,采用抽样法,从小麦倒伏区域选取样本,利用无人机快速获取样本区影像,分别采用自动分类和目视解译两种方法获取样本区倒伏小麦面积,通过对两种解译结果进行对比分析,证实自动分类方法的可行性和可靠性,从而得出一套高效的灾后评估小麦倒伏受灾面积的技术流程,为政府部门的有关工作提供强有力的数据支撑。
2 天狼星无人机航摄系统介绍
拓普康天狼星无人机由美国拓普康定位系统公司(简称TPS)联合德国玛芬奇MAVinci共同研发并生产,结合玛芬奇在无人机飞行平台专业的研发团队,凭借多年在全球无人机飞控系统设计方面的领先技术优势,率先推出全球第一台内置RTK实时测量的无人机航空摄影平台,颠覆了传统航测大量布设地面控制点的作业流程,在无人机航空摄影测量领域引起广泛关注[1]。
2.1 系统组成
(1)飞行平台:包括自动驾驶模块、影像传感器和RTK测量模块。
(2)飞行控制系统:由自驾仪、GPS/IMU惯性导航系统和GPS接收机等组成,可实现无人机飞行参数的传输,使无人机按照预定航线平稳飞行。
(3)地面监控系统:包括地面监控软件和无线遥控器等。地面监控软件为MAVinci软件,也是飞控软件,可实时监控无人机在空中的飞行参数,确保飞行任务顺利完成。
(4)内业数据处理软件:有地面站软件MAVinci Desktop和影像后处理软件PhotoScan。MAVinci Desktop进行了深度整合,可将所有外业数据一键导入PhotoScan,并进行智能后处理,整个流程无需任何人工交互编辑操作,最终生成高精度的DOM、DEM、点云等成果。
2.2 系统优势
与传统航测设备相比,天狼星无人机航测系统具有以下优势:
(1)内置100HZ RTK接收模块,无需布设地面像控点便可获取高精度的测量成果;(2)智能化的地面站航线规划软件,内置了多种航线设计方式,如多边形航线设计、带状航线设计、井字形航线设计、沿地形起伏航线设计 ;(3)一键式的数据后处理软件;(4)飞机采用航空泡沫材料,电动力驱动,重量轻,同时内置了多种应急返航机制,使外业数据获取工作更加安全。
3 项目案例
3.1 项目概况
测区位于某地以粮食生产为主要农作物的县域,在小麦灌浆期出现一次大风强降雨天气,导致小麦大面积倒伏,经济损失严重。灾害发生后,为第一时间评估灾害造成的人民生命财产损失,科学指导灾后救助工作,减少农民损失,政府有关部门经多方探讨,最终决定采用无人机航测评估小麦倒伏造成的经济损失。
3.2 技术路线
小麦倒伏评估技术路线如图1所示。
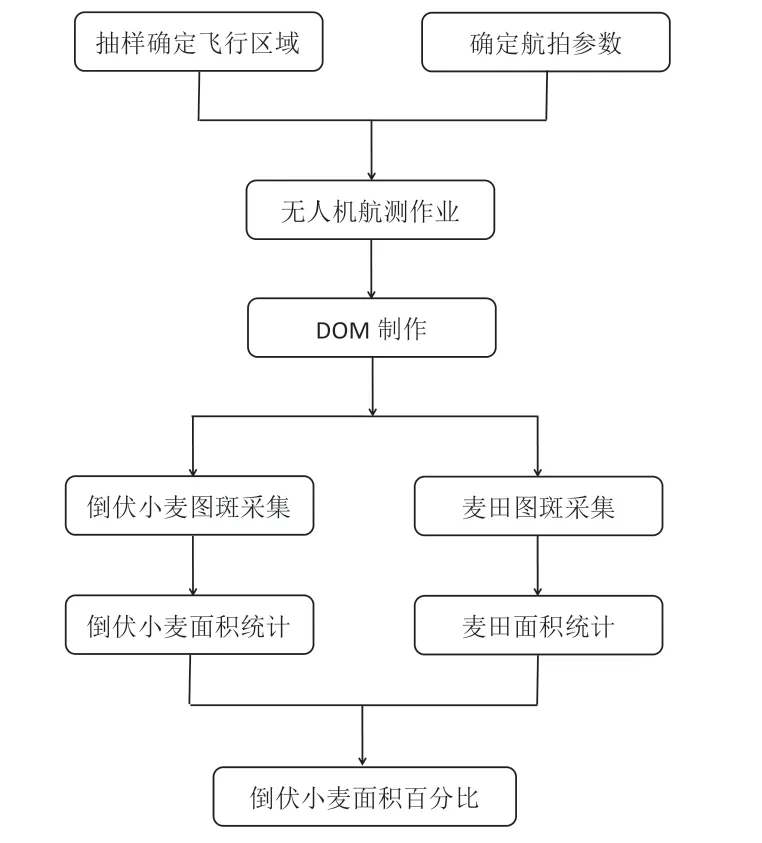
图1 小麦倒伏评估方案
3.3 样本取样
样本取样就是从调查对象的总体中抽取一定大小、形状和数量的样本,以最小的人力和财力、最短的时间,达到最大程度代表这个总体的目标。常用的调查取样方法有分级取样、分段取样、典型取样和随机取样。
典型取样又称主观取样,指在总体主观选定一些能代表全群的作为样本。当熟悉全群分布规律时,采用该方法可节省人力和时间,但调查中要尽量避免误差。因此为了保证样本具有代表性,项目采用典型取样方式选取样本,在受灾较重区域选择1平方公里作为样本区域,航拍区域如图2所示。

图2 航拍区域
3.4 航线设计
采用MAVinci Desktop软件设计航线,该软件是三维环境,以BING的在线地图为工作底图,用户输入测区指定分辨率、拐点坐标及设计飞行重叠度等参数,系统便可自动生成航测路线(如图3所示)。同时也可加载数字高程模型,根据地形起伏自动调整航高,确保地面采样距离、重叠率相同,并匹配出高精度照片。

图3 航拍设计
本次航拍地面分辨率为3cm(航高138m),航向重叠80%,旁向重叠60%,航向覆盖超出边界线不少于一条基线,旁向覆盖超出摄区边界线不少于扫描宽度的30%。外业飞行两个架次完成样本数据采集。
3.5 影像数据获取
利用拓普康天狼星无人机航测系统获取测区地面分辨率为3cm的影像。在飞行中,一架次用时34min,飞行距离31km,共飞行两个架次,拍摄照片2400张,100%覆盖整个测区。
3.6 数据后处理
天狼星无人机航测系统采用一键式数据处理方式,减少了人工干预[2],具体流程如下:
(1)首先通过相机检校参数对无人机采集的原始影像进行畸变纠正,消除影像的畸变差;
(2)利用POS数据提供的6个外方位元素对像片进行对齐处理,通过空中三角测量对影像进行相对定向、绝对定向和光束法区域网平差,实现影像匹配;
(3)在空中三角测量完成后,通过影像密集匹配,利用空间前方交会原理获取每一个像素点的空间坐标,生成密集的三维点云数据;
(4)根据影像密集匹配生成的三维点云来生成格网和纹理,通过建立规则格网生成数字表面模型DSM和数字正射影像图DOM。
整个数据后处理过程需2小时。DOM成果如图4所示。

图4 DOM成果
3.7 影像解译
影像解译是本项目的一个重要环节,为探索出高效的解决方案,影像解译采用人工判读和自动分类两种方法同时进行,最终从投入人力、耗费时间、解译面积和成果质量四个方面进行对比分析,得出结论。
3.7.1人工判读
为快速得到受灾区域面积,根据对受灾区域的初步判断,投入两个经验丰富的作业员对影像进行人工目视解译,采用ArcGIS10.1软件采集受灾区域图斑进行统计。人工采集用时6小时,完成了1平方公里的受灾区域图斑采集,共采集图斑1506个,如图5所示。
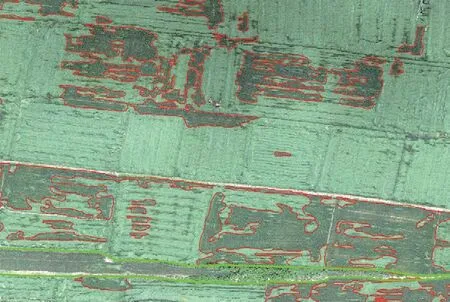
图5 人工判读成果
3.7.2自动分类
自动分类采用eCognition 8.7软件进行,该软件是由德国Definiens Imaging公司开发的智能化影像分析软件,是目前所有商用遥感软件中第一个基于目标信息的遥感信息提取软件,采用决策专家系统支持的模糊分类算法,突破传统商业遥感软件单纯基于光谱信息进行影像分类的局限性,提出了革命性的分类技术——面向对象的分类方法,提高了高空间分辨率数据的自动识别精度,可满足科研和工程应用需求。
在eCognition 8.7软件developer模块下制定地物解译规则[3],通过多次试验,分割尺度参数设置为100,形状因子设置为0.2,紧致度因子设置0.8为最优分割参数。分割参数获取耗时1h,分割耗时0.5h。分类精度的好坏取决于分割结果的好坏,由于分割结果较好,本次分类主要采用亮度和NDVI两个特征参数进行提取。首先采用亮度参数提取出倒伏小麦,在此结果上根据NDVI再将冗余的倒伏小麦剔除,最终分类得出与实际最接近的倒伏小麦图斑。此工作耗时0.2h。
在自动分类过程中,由于影像获取时光线的差异,相邻架次影像纹理会稍有差异,在自动分类时会出现少量错误分类,属于正常现象。最后将分类结果导入ArcGIS软件,人工进行同属性合并处理和错误分类剔除,最终得出真实的小麦倒伏面积。此工作耗时0.3h。自动分类成果如图6所示。

图6 自动分类成果
3.7.3影像解译功效对比
对采用人工判读和自动分类两种方法开展的影像解译功效进行对比,结果如表1所示。

表1 影像解译功效对比
4 结论
本文利用无人机航测方式进行小麦倒伏灾害评估,根据无人机获取的高精度影像的纹理特征判定是否受灾,此方法在实际应用中获得了非常好的效果,验证了其可行性。为了进一步优化方案,提高效率,本文用人工判读和自动分类两种方法进行对比分析,通过实际论证得出,在满足成果质量的前提下,自动分类结合少量人工干预的方法效率比纯人工判读提高了3倍左右。因此,通过探索得出了一种高效的方法用于小麦倒伏灾害评估,可为以后类似工作提供参考。
