基于三维声呐成像技术检测桥梁水下构件缺损研究
2022-07-13张臣
张臣
(中交元洋(大连)桥梁水下检测有限公司,辽宁 大连 116026)
0 引言
桥梁墩台基础是桥梁主要的承重结构,其工作状态直接影响桥梁的承重能力。桥梁水下构件多置于水中,长期处于复杂的水文地质中,受流水冲刷、侵蚀,使得桥梁水下构件的病害日益增多和严重。这些病害位置处于水下,常规检查时难以被发现,是桥梁结构的巨大安全隐患[1]。因此,全面系统地了解和掌握桥梁水下构件的状况至关重要,能为桥梁的养护、维修提供科学合理的技术资料和决策依据,从而确保桥梁结构的安全[2]。
传统的水下检测多处于内河桥梁,传统的方式是采用潜水员进行水下探摸及水下录像检测。潜水员水下探摸一般在流速小于0.5m/s 的情况下进行,且存在随水深增加作业时间急剧减少的情况;水下录像检测同样在流速小于0.5m/s 的情况下进行,且需要良好的水中能见度才能获得结果。
三维声呐成像技术利用了声波特性,在水中具有能远距离传输、受水文条件影响小等优势,能将声波信号通过点云数据处理后转化为三维图像,形成水下桥梁水下构件的三维全景图像[3]。研究一种针对桥梁水下构件的三维成像声呐算法,能方便快捷有效地检测桥梁水下结构缺损状况,获得更准确的桥梁水下构件缺损状况数据。
1 检测方法流程
在现场工作环境中,可将声呐系统设备集成到桥梁水下检测船[1]的固定杆上(见图1),便于控制声呐设备与被检测水下构件的距离和相对位置,实现对桥梁水下构件的扫描。
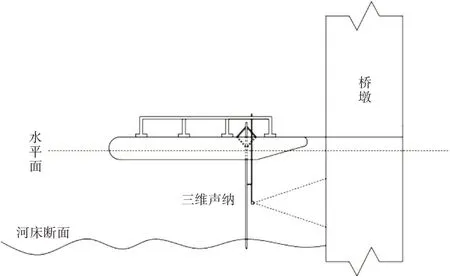
图1 声呐设备在现场工作环境中的布置
基于Matlab2018利用统计滤波算法对得到的图像进行多次去噪并分割去噪后的图像,通过数据点Z方向梯度变化情况来判断缺损的边缘,得到缺损区域图像;将缺损区域图像投影到二维平面上,根据压缩到二维平面点的形状构造多边形,将缺损区域圈出来,然后提取多边形内部的数据点得到完整缺损区域图像,利用泊松曲面重构算法进行曲面重建,利用海伦公式求取缺损面积,计算X 和Y 方向的最大值和最小值之差得到宽度,并在Z 方向取10 个绝对值最大值然后取平均得到缺损深度,利用凸包算法得到缺损体积。总体的三维声呐成像技术检测桥梁水下构件缺损的工作流程如图2所示。
2 算法实现过程

图2 三维声呐检测桥梁水下构件缺损工作流程
声呐图像生成的原理是根据脉冲传播回声的时间分布,声呐左右侧分别装有一条换能器线阵,发出触发声脉冲后声波进行散射传播,呈现球面传播形式,遇到水下桥墩、砂石等障碍物会产生反射,回波会按照原路径返回进而被换能器接收,然后换能器对回波进行转换,形成电脉冲。每一次发射周期的数据排列后通过显示器显示,构成了三维声图,因此图像与扫描区域呈一一对应关系。
在进行扫描时,脉冲与换能器之间的距离不同,换能器接受回波的时间也有所不同,即触发的信号强度不同,根据反射信号波的强度描绘声呐图像。距离发射原点较近的位置,即凸起区域,在图像中会产生高光区域,而在凸起与凹陷交界处的盲区,接收器接收不到返回的波束,因此在图像中就产生一块阴影,后期根据呈现的图像辨别水下地貌或水下结构缺损类型及程度。
换能器间距为d 的n 个等间距阵元构成的线阵声束图函数为:此声呐采用多波束形成技术,主要通过相移法来实现,将声程差换算为相位差:

N 元等间隔直线阵列第K 个阵元的输出信用复数表示为:

假如在各阵元间插入相移βr,此处令:

各阵元的输出为:

写成离散形式为:

将时间因子忽略,阵元的输出为:

考虑相移后阵元总输出为:

将式(3)代入式(7)得到:

波束间隔为:

通过与上式联立得到:

式(1)~式(10)中:λ 为声波波长;ω 为信号角频率;θ为平面波入射方向;d为阵元间距;ϕ为相邻阵元信号相位差。
此时的样本来自不同阵元在同一时刻的信号,即空间各点的信号。
将高频信号转换为图像信号,建模重构全息图,在系统中得到三维点云图像(水下构件)如图3 所示,扫描时应注意设备正对桥梁水下构件,覆盖完整的桥梁水下构件缺损区域。
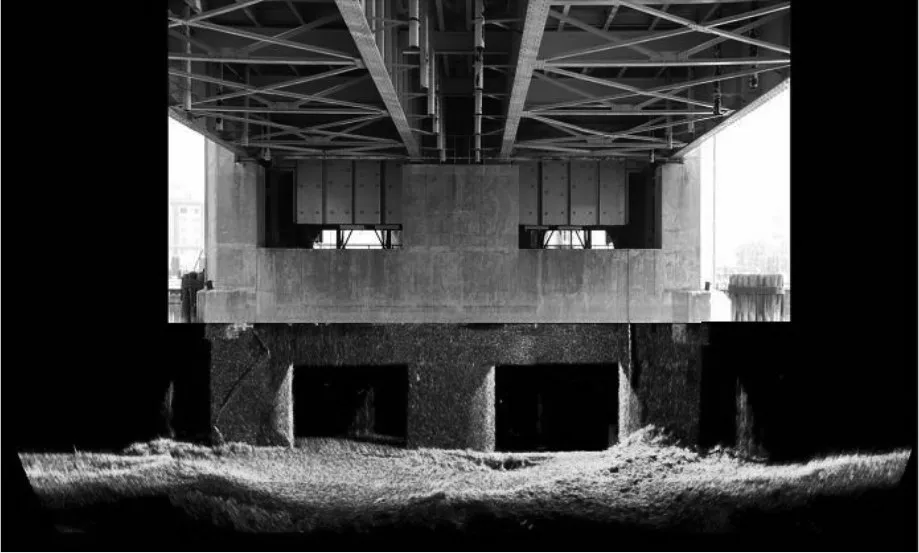
图3 三维点云图像
对所得三维点云图像进行处理,得到缺损区域图像。因水下三维图像处理与其他三维图像处理不同,其分辨率低,可用数据少,由于水下鱼群游动、水体流动、测量目标本身的不均匀反射特性等,图像受噪声污染明显,造成测量得到的点云数据中存在不稳定点和噪声点等,因此首先需对三维声呐图像进行基本的滤波去噪处理[4]。采用统计滤波去噪,在算法中设定滤波参数,将噪声点云去除。得到去噪图像,分割所得图像,进一步得到缺损区域的图像。
以垂直于水下结构的方向为Z坐标轴,假定水下结构近似平面,通过对数据点Z向梯度变化判断缺损的边缘,进一步提取缺损的点云数据。
此时已将水下结构平面点云去掉,但因结构表面凹凸不平所致,并不能提取出完整精确的缺损区域点云,需进一步处理。将缺损区域的三维图像投影到二维平面,得到缺损区域的二维平面图,根据压缩到二维平面点的形状构造多边形,框选缺损区域,提取多边形内部的数据点得到完整缺损区域图像。
根据得到的完整缺损数据,利用Matlab 中内建的ConvexHull 凸包算法构造出一个凸多边体,最终计算出缺损的体积,结果如图4所示。
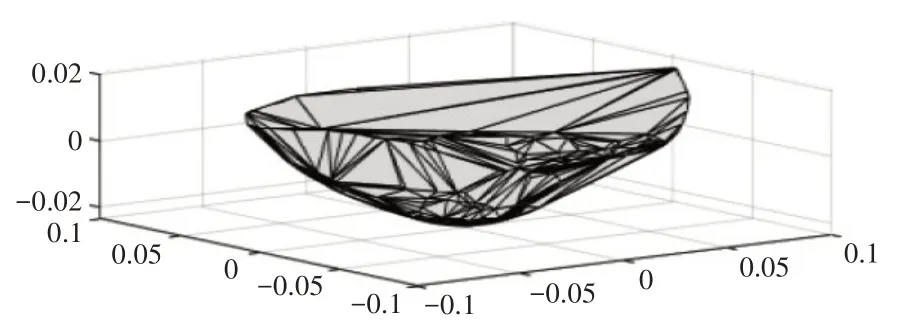
图4 缺损体积
为计算缺损面积,基于缺损点云数据,选用泊松曲面重构算法重建曲面。该算法以点云样本构造出一个光滑的曲面,利用点云的法向量判断坑槽的内外方向,给定一个区域M,坑槽边界为∂M,指示函数χM定义如下:

最终通过求取χM求解得到坑槽表面。
泊松曲面重建得到的光滑曲面是由多个小三角形拼接而成的,因此要得到坑槽面积,需求解出每个小三角形的面积并求和,本文利用海伦公式进行三角形面积求解,公式如下:

对所有的三角形进行求和,最终得到坑槽面积。
为得到缺损宽度、深度的数据,分别利用三维点云在X 和Y 方向的最大值和最小值之差得到X 方向和Y方向宽度,并在点云Z 方向取10 个绝对值最大值然后取平均得到坑槽深度,最终结果如图5所示。
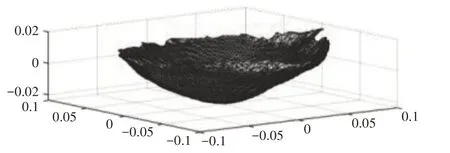
图5 3个方向缺损深度
3 结语
本文解决了桥梁水下构件缺损测量问题,以往测量方法都是基于人工探摸以及水下摄像检测,此方法存在弊端,在危险水域潜水员的安全得不到保障,检测效率慢且测量结果受人为主观影响存在误差。本研究利用三维声呐扫描桥梁水下构件结合本算法可自动得到桥梁水下构件缺损信息,提高了检测效率,同时解决了人员安全问题。
本文在对三维图像分割时,首先用统计滤波算法去除掉图像噪声,减少了三维图像的数据量,提高了缺损区域分割速度。分两步进行桥梁水下构件缺损区域分割,第一步利用Z向梯度变化,得到缺损区域的大致范围;第二步将三维图像投影到二维平面,根据投影形状进行框选,最终得到完整精确的缺损区域三维图像。此方法提高了分割的完整性和准确性。
本文在计算缺损信息时,利用泊松曲面重构算法重建缺损区域表面,此方法可最大程度还原桥梁水下构件缺损外貌,提高了测量结果的准确性;利用三维数据点在不同方向的差值得到缺损的深度、宽度,利用凸包算法计算桥墩缺损体积,与利用微积分方法得到缺损信息的方法相比具有更高的准确性。
