螺旋桨中的流动噪声问题
2022-07-13吴佳峰
吴佳峰,黄 迅
(1. 北京大学 工学院 航空航天工程系,北京 100871;2. 北京大学 湍流与复杂系统国家重点实验室,北京 100871)
0 引 言
20 世纪60 年代以来,螺旋桨噪声作为航空发动机、水下航行体和风力发电机等应用中的重点问题,受到各国学者的广泛关注和研究。除了影响乘客舒适性,螺旋桨噪声还会对军用飞行器和潜艇的声隐身性带来负面影响。随着我国国防重大装备需求的不断提升,以及民用飞机发展乃至下一代绿色环保飞行器等需求的提出,对螺旋桨噪声源、噪声源与机体流动耦合、远场辐射的机理进行预测和控制,成了迫在眉睫的问题。
空气中的螺旋桨噪声问题属于气动声学的研究范畴。如果考虑水下的噪声问题,学界更普遍地将其称为流动噪声或者流致噪声。尽管空气和水的可压缩性和黏性存在很大不同,使得这两种介质中,无论是各噪声源的种类和声压级大小,还是噪声的产生和辐射机理,都有一定区别,但是对于水下的无空泡情况,所用的基本研究方法和工具还是源于气动声学。
流动噪声的研究工作可以追溯到第二次世界大战结束前后,南安普顿大学的Lilley 对射流噪声的研究[1]。不过学界普遍以Lighthill 在1952 年研究射流噪声时,提出的声比拟思想作为气动声学的起源标志[2]。该方法的基本思想是从流体力学著名的Navier-Stokes 方程出发,将方程左端重组为波动方程,右端则与波动方程数学形式上相似,重组为等价的气动声源。有关声比拟方法的提出和发展历程,以及学界对声比拟思想的质疑和捍卫,感兴趣的读者可以参考气动声学的综述文章[3],本文不再赘述。
螺旋桨噪声问题涵盖的应用相当广泛,从20 世纪60 年代的叶轮机械噪声问题[4-6]、20 世纪70 年代的水下螺旋桨噪声问题[7-8]、20 世纪80 年代的直升机旋翼噪声问题[9-11]和开式转子噪声问题[12-13],到近两年受到关注的无人机螺旋桨噪声问题[14-17]和面向未来 的 翼 身 融 合 布 局(blended wing body,BWB)飞机[18-21]等问题,这些问题的产生和发展多是从实际需求出发。从物理机制而言,主要包含吸入湍流噪声(turbulence ingestion noise,TIN)、转 定 干 涉(rotorstator interaction,RSI)噪 声、桨 涡 干 扰(blade-vortex interaction,BVI)噪声和边界层吸入(boundary-layer ingestion,BLI)噪声等问题。
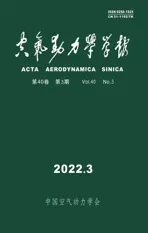
从近几年AIAA/CEAS 气动声学年会的研究工作情况,可以大致看出该学科的研究现状和发展方向。图1 统计了2018~2021 年AIAA/CEAS 气动声学年会中,有关螺旋桨噪声问题和应用的研究论文数量,主要包括城市无人飞行系统噪声、螺旋桨及垂直起降噪声和涡轮机械噪声(其中2020 年由于新冠疫情的影响,会议论文数量大幅减小)。可以看出,在2018 年,涡轮机械噪声的研究工作占了大部分;到了2021 年,涡轮机械噪声的研究热度已经降低;而与之相对的,螺旋桨噪声,尤其是来自无人机旋翼的噪声,在近年受到了学界越来越多的关注。
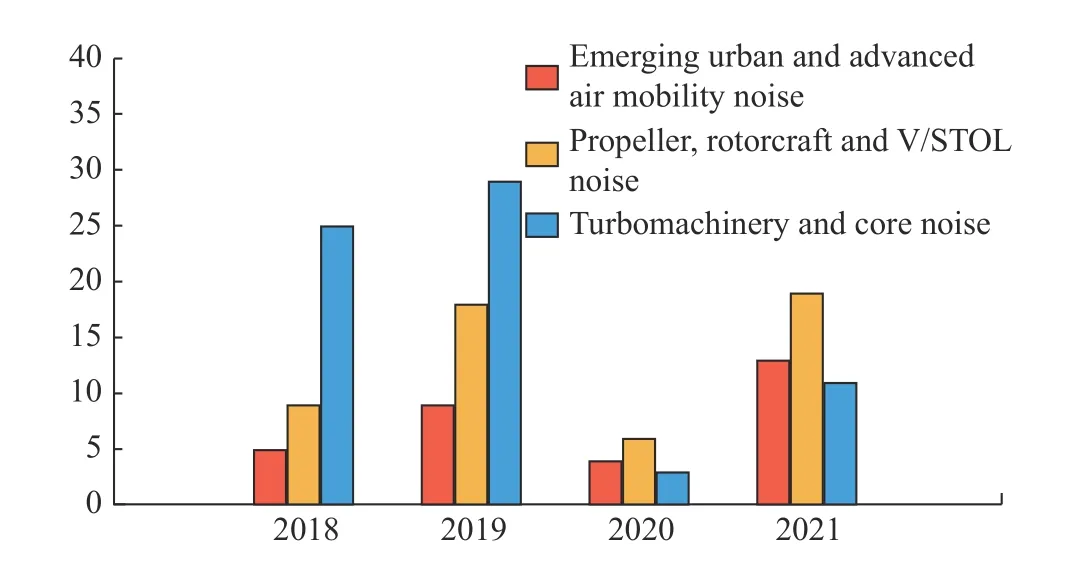
图1 近年AIAA/CEAS 气动声学年会的论文数量Fig. 1 The number of papers in recent AIAA/CEAS aeroacoustic conference
本文首先阐述螺旋桨噪声的若干基本问题的历史发展、研究现状;接着从实际需求出发,对螺旋桨噪声现在的及未来可能的应用等方面进行展开。抛砖引玉,希望能为感兴趣的读者进一步选取研究切入点提供参考。
1 基线问题
吸入湍流噪声问题是螺旋桨气动声学的基线问题,主要起源于20 世纪70 年代初。宾夕法尼亚州立大学的Sevik[7]提出水下螺旋桨在格栅湍流中存在非定常脉动推力和与之直接相关的流动噪声问题。
基于两点的速度相关函数和Sears[22]的二维薄翼升力理论,Sevik 提出了一个频域的理论模型来预测螺旋桨的非定常脉动推力和远场声辐射;并在水洞中对一个10 叶螺旋桨的推力进行了试验测量,以验证理论方法。Sevik 在水洞试验中,分别使用了网格间距为4 in 和6 in(1 in ≈ 0.025 4 m)的湍流格栅产生近似均匀、各向同性的湍流,并在湍流格栅后方20 倍的网格间距处设置螺旋桨,测量该螺旋桨在格栅湍流激励下的非定常脉动推力响应。其中,螺旋桨的直径为0.203 2 m,来流速度为4.69 m/s,进速系数为1.22。试验结果表明,螺旋桨的非定常脉动推力频谱分为低频宽带脉动力和叶频线谱力两个部分。该理论模型成功地预测了非定常脉动推力频谱的低频宽带部分,但无法解释“驼峰”(又称“干草垛”)现象。该现象指叶片通过频率(blade passing frequency,BPF,即叶频)及其倍频附近出现了宽带峰值,该峰值对应的频率略高于叶频及其倍频,如图2 所示。
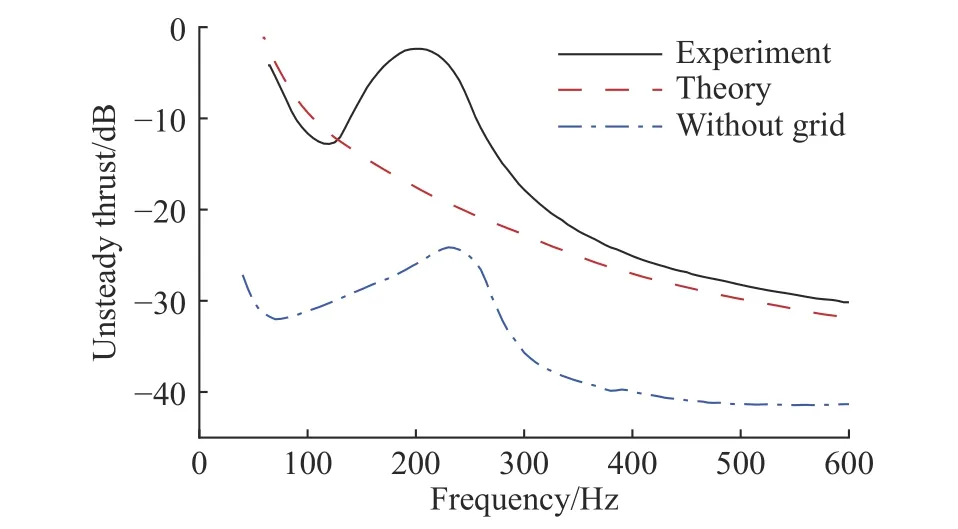
图2 水下螺旋桨非定常脉动推力的实验和理论结果[7]Fig. 2 The experimental and theoretical results of rotor unsteady thrust[7]
这种由Sevik 首先发现的现象,数十年来始终是一个具有挑战性的研究热点,促进了螺旋桨吸入湍流噪声问题研究的发展。但是学界至今没有对此完全达成共识,特别是宽带峰值对应的频率相对于叶频及其倍频右移的原因。随后,宾夕法尼亚州立大学的Thompson[8]对Sevik 的试验,特别是与非定常脉动推力测量相关的试验,进行了重复和补充。
20 世纪末,针对Sevik 发现的“驼峰”现象以及水下螺旋桨的非定常脉动推力和噪声问题,美国的学者和海军研究机构进行了深入的理论研究。美国海军水面作战中心的Blake[23]从频域出发,提出了谱方法。该方法也成为了目前水下螺旋桨噪声理论预测的基本方法之一,后人提出的理论方法大多是在谱方法的基础上进行更进一步地发展。
谱方法的基本思想是先利用Sears[22]的二维薄翼升力理论,求出螺旋桨叶片单位长度上下表面的压力差导致的非定常升力,然后在展向方向积分,即可求出螺旋桨的非定常脉动推力谱和远场声压谱。在谱方法的实际应用中,叶片展向方向的积分难以求解,因此往往会和Kirschner[24]提出的条带数值法相结合。即,将螺旋桨沿径向划分为若干条带,通过物理量在各条带上的累加来获得展向方向的积分。根据湍流积分尺度相对于螺旋桨叶片弦长的大小,Blake用两个渐近式的形式给出了理论模型。Blake 的小长度尺度湍流模型与 Sevik 的理论模型相似,能够预测非定常脉动推力谱的宽带部分,但忽略了叶片之间的旋转相关性,因此无法预测“驼峰”现象;大长度尺度湍流模型能够解释叶频及其倍频附近的峰值,但未能预测非定常推力谱的宽带部分,并高估了峰值的幅值大小。
Jiang[25]通过修正速度相关函数来引入旋转效应,提出了一个统一的相关模型,该模型可以同时考虑小尺度和大尺度湍流的贡献,从而同时预测出非定常推力频谱的宽带和峰值部分。Jiang 的模型预测中,非定常推力频谱的峰值大小较低,峰值对应的频率也略高于Sevik 的试验结果。 Martinez[26-28]提出的理论模型首次考虑了径向脉动力和螺旋桨叶片数(大于等于6)的影响,但没有考虑不同角度的径向力之间的互相关,以及径向力和轴向力之间的互相关。该模型预测的二次叶频附近峰值的幅值远低于Sevik[7]的试验数据。
从21 世纪开始,与Sevik 工作相关的水下螺旋桨噪声研究中,几乎找不到公开发表的来自美国的研究工作。但从公开的文献推断,Sevik 的10 叶桨模型依然被美国的研究人员大量采用,只不过试验多从水洞中转到了风洞中而已。
21 世纪初,美国海军水面作战中心的Blake 和圣母大学的Wojno 等在风洞中开展了一系列试验和理论研究[29-32]。不同于之前假设来流为均匀各向同性湍流的研究工作,他们结合谱方法发展了半经验方法,考虑了非均匀来流的影响。风洞试验中的其他试验条件,例如来流马赫数、进速系数、湍流格栅的孔隙率和雷诺数等参数,都与Sevik 的水洞试验[7]中的参数相同[31]。他们首先通过试验测量了格栅湍流的湍流统计特性,代入湍流波数谱和流体动力响应函数;然后利用谱方法得到螺旋桨的非定常脉动推力谱和远场声压谱;最后将试验测量得到的远场声压谱与该理论方法预测的结果进行对比,如图3[32]所示。他们的半经验方法是对Blake 提出的谱方法[23]的发展,该方法准确地估计了螺旋桨噪声的宽带部分,但由于低估了叶片之间的旋转相关性,该方法预测的峰值幅值小于Sevik 的试验结果。
图3 螺旋桨噪声的预报方法[31]Fig. 3 Prediction methods for the rotor noise[31]
2012 年,美国海军水面作战中心的Catlett 和Anderson 等[33]继续在风洞中进行试验,将螺旋桨设置在某大型气动面后方,研究位于剪切流来流中的螺旋桨的非定常脉动推力和噪声谱。与之前的格栅湍流来流的特性不同,这种剪切流在周向是不对称的,因此螺旋桨在旋转时的来流具有时间和空间上的非均匀性和各向异性。为了考虑来流的非均匀性和各向异性,他们将坐标变换后引入到湍流模型中,并使湍流模型的参数可以在螺旋桨盘面上变化;然后用试验测得的两点的速度相关函数等参数来表征来流的统计特性,从而实现了对非均匀各向异性剪切来流的半经验建模。非均匀各向异性模型预测的远场声压谱与试验结果取得了较好的一致性,验证了该方法的可靠性。
长期以来,学界一直认为螺旋桨的轴向脉动力(即脉动推力)在远场声辐射中占据主导地位,在谱方法中也仅考虑了螺旋桨的非定常轴向脉动力作为偶极子声源对远场辐射噪声的贡献。2015 年,美国海军水面作战中心的Anderson 和Catlett 等[34]再次对螺旋桨非定常脉动力的预测方法进行了发展,在时域上提出了新的理论模型,考虑了螺旋桨的径向脉动力对远场辐射噪声的贡献。理论预测的结果与试验的结果取得了较好的一致性,并且证实当叶片的桨距角达到45°时,螺旋桨的径向脉动力的偶极子声源强度与轴向脉动力的声源强度基本相同。
近年来,作为水下螺旋桨噪声研究的基线问题,Sevik[7]提出的螺旋桨非定常脉动推力和噪声问题也受到了国内学者的广泛关注。中国船舶科学研究中心的熊紫英、朱锡清等[35]验证了谱方法和条带数值法等螺旋桨低频宽带噪声的预测方法,对水下螺旋桨在入射湍流激励下的螺旋桨噪声进行了试验和理论研究,并分析了湍流统计量(湍流度、湍流积分长度)和螺旋桨设计参数(直径、弦长、叶数等)对螺旋桨噪声的影响。理论结果与Sevik 的试验结果总体趋势一致,在一阶叶频处有较好的一致性,但是预测的二阶叶频处宽带峰值对应的频率高于试验结果。浙江大学的吴大转课题组[36]利用数值模拟方法,对Sevik 的基线试验中的螺旋桨非定常脉动推力进行了预测。他们首先在入口引入合成湍流,然后利用大涡模拟(LES)方法进行模拟。数值模拟得到的结果与Sevik 的试验结果总体趋势一致,但是在二阶叶频处依然与试验结果有差别。清华大学的蒋靖伟、黄伟希等[37]利用谱方法和条带数值法,对螺旋桨非定常脉动推力进行了预测,数值模拟的结果同样在二阶叶频处与Sevik 的试验结果有较大差别。
值得注意的是,在与Sevik[7]公布的原始试验数据进行对比的过程中,北京大学的黄迅发现了Sevik 文章中的试验数据有错误。在Sevik 的试验数据中,螺旋桨在4 in 湍流格栅后方,非定常脉动推力谱一阶叶频处的幅值约为 -2 dB,而Jiang[25]引用的该数据约为-15 dB。美国学者后来的文章都在有意无意地回避这一点。甚至,即使是Sevik 的同一篇文章[38],引用的数据中一阶叶频的幅值也各不相同。经过穷搜文献,最终发现Paul 等[39]明确指出Sevik 的原始数据后处理有误(“Due to an error made during the post processing of the experimental data the unsteady thrust amplitude is not correct in the original paper”)。
黄迅课题组的吴佳峰、杨周剑云针对此问题进行了探索和数值验证,对Sevik 螺旋桨在格栅湍流下的非定常脉动推力谱进行了数值模拟。该研究采用开源软件OpenFOAM 的延迟分离涡(DDES)模型,模拟来流(入口来流无湍流度)在湍流格栅后方的自由发展,从而考虑吸入格栅湍流的非均匀性和流动结构对螺旋桨非定常脉动推力的影响;分析了格栅湍流的统计特性,并证实了Sevik 试验数据后处理错误的原因,明确了Sevik 文献中螺旋桨非定常脉动推力谱的一阶叶频峰值的试验结果应该修正 13 dB,修正后的结果为-15 dB。至此,Sevik 的基线试验已经得到我国学者的充分验证。
不过,对于水下螺旋桨吸入湍流噪声问题,相关流动和声学的机制,特别是格栅湍流来流的非均匀性、各向异性,以及来流的湍流结构与叶片的相互作用,对“驼峰”的产生有怎样的影响,还没有得到充分研究。因此,Sevik 提出的基线问题依然可以作为今后从事螺旋桨吸入湍流噪声研究工作的切入点,相关工作对于未来混合动力航空发动机、多电乃至全电航空发动机的设计有重要的科学意义和应用价值。
2 物理机制
2.1 转定干涉噪声问题
转定干涉(又称转静干涉)主要是指转子旋转时与前方定子尾流的相互干涉现象,广泛存在于航空发动机中,会产生声辐射,影响推进效率。
研究表明,转定干涉是航空发动机远场辐射噪声的主要声源[40]。除此之外,航空发动机的噪声问题还包括转子的自噪声问题、定子和转子前缘与边界层吸入湍流的相互干涉等问题,具体可以参考剑桥大学的Peake[41]撰写的综述文章。各国学者已经对航空发动机的噪声问题进行了深入研究[42-44],并发展出了声衬[45]、定子的前后缘锯齿[46-47]、定子的前倾和侧斜[48-50]等降噪手段,在本文中将不展开叙述。
值得注意的是,转定干涉的物理机制与定子尾流的流动特性具有很大的关系。Zdravkovichp[51]在对圆柱尾流的研究中,将圆柱在均匀来流中的流态进行了分类:层流、尾流的转捩、亚临界(指自由剪切流向湍流的转捩)、临界(指在边界层中向湍流的转捩)和充分发展湍流。
当转子与定子的距离大到一定程度时,转子与定子产生的剪切流的相互干涉将会转化成转子与定子周期性脱落的尾涡的相互干涉,即亚临界流态。此时的流动和声学特性与近距离的转定干涉有明显区别。例如,此时螺旋桨的非定常脉动力谱和远场声压谱,除了叶频及其倍频附近存在宽带峰值外,还会在定子的涡脱落频率上出现较高的峰值[52-54]。
对这种亚临界流态的研究,最先来源于飞机的起落架噪声问题,因此目前的研究大多还局限于前方圆柱、后方机翼的二维简化设置[55-57],没有考虑到三维的流动效应。对于亚临界距离的大小,目前还没有定论,不过在圆柱-机翼设置中,其大致范围为2~4 倍的圆柱直径[56]。
水中装备系统的特殊性在于,除了航空中常见的转定干涉,还存在定转干涉和定转定干涉等新情况。研究航空发动机、潜艇泵喷推进器等的亚临界现象以及确定亚临界距离,有助于加深对转定干涉现象的理解,促进未来航空发动机和潜艇的设计。
2.2 转子-边界层吸入湍流噪声问题
转子-边界层吸入湍流噪声问题近年来得到了国外学者的关注,该问题继承于Sevik[7]提出的螺旋桨吸入湍流噪声基线问题,由下一代翼身融合布局飞机[18-21]的设计需求驱动。翼身融合布局飞机将高效的高升力翼型与宽翼型机身相结合,从而提高升力的同时将阻力降到最低。早在20 世纪80 年代的B2 轰炸机的设计中,就有翼身融合布局设计概念的雏形。21 世纪初,波音公司和美国国家航空航天局(NASA)开展了合作,对翼身融合试验机型X-48 系列进行了设计和试验,如图4 所示。系统性的设计可以参考波音公司Liebeck[18]的文章。近年来,随着各国陆续宣布将在2050 年实现碳中和的目标,如何对下一代的汽车、飞机进行设计,成为了工业界和学术界越来越关注的问题;而翼身融合布局飞机就是未来飞机设计中,实现减排降噪的可行方案之一,并且其在轰炸机和无人机等军用领域、民用领域也具有较大的发展潜力。

图4 翼身融合布局试验机型(图片来源:NASA)Fig. 4 Blended-wing-body testing aircraft
在翼身融合布局飞机的设计中,通常将发动机进气口安装在机翼后缘,目的是通过吸入吸力侧的边界层最厚部分,来改善巡航的燃油消耗[58]。这种设计带来的问题是在翼身融合布局飞机起降和巡航的所有阶段,发动机的进气口都会吸入大量较厚的边界层湍流,并与发动机的定子和转子的前缘相互作用,产生振动和噪声问题。除了翼身融合布局飞机之外,在一些未来飞机的设计概念中,例如NASA 的D8 型亚声速飞机的设计,也考虑到通过发动机吸入较厚的边界层湍流来提高效率、改善噪声问题。对于吸入边界层厚度超过100%叶片弦长的边界层吸入湍流噪声问题,现有的理论模型都不适用,也缺乏详尽的试验研究[59]。因此,研究转子-边界层吸入湍流噪声问题,将有助于未来飞机的设计,从而实现节能减排的目标。
2012 年开始,弗吉尼亚理工大学的Devenport、Alexander 与佛罗里达大西洋大学的Glegg 等进行了一系列理论研究和试验[60-63],研究转子对吸入平板边界层湍流的噪声响应。他们在弗吉尼亚理工大学的风洞中,试验测量了按比例放大直径至457 mm 的Sevik 10 叶螺旋桨在吸入平板边界层湍流中的远场声辐射。试验结果显示[63],在高推力工况下,远场声压谱宽带峰值的幅值更高,具有更加明显的唱音特征。他们分析指出,“驼峰”现象是在低推力或中等推力工况下,多个叶片切割相同的大尺度湍流结构产生的,也就是上文中提到的叶片之间的旋转相关性。此外,他们还发现在螺旋桨盘面附近出现了边界层分离,这些结构与叶片的相互作用成为高推力工况下额外的唱音噪声声源。之后,代尔夫特理工大学的Casalino等[64]基于格子玻尔兹曼(lattice Boltzmann method,LBM)方法,对该试验设置进行了数值模拟研究。
在第27 届AIAA/CEAS 的气动声学年会中,Devenport、Alexander 和Glegg 等[65]继续开展合作,对转子-吸入边界层湍流噪声问题进行试验研究。在风洞中,试验测量的5 叶螺旋桨放置在回转体后方,以研究螺旋桨在回转体的边界层湍流中的远场噪声。同时,圣母大学的王萌[66]基于大涡模拟方法,对该试验设置进行了数值计算研究。计算模拟结果与试验结果取得了较好的一致性。结果表明,“驼峰”的峰值出现在叶频及其2~4 倍倍频附近,对应的频率相比叶频及其倍频右移了8%~12%。
3 实际应用
3.1 下一代飞机设计
为了实现2050 年碳中和的目标,除了比较具有潜力的翼身融合布局飞机之外,开式转子飞机、混合动力飞机和纯电动飞机也是可能的发展方向。
开式转子发动机(又称桨扇发动机)最先来源于20 世纪70 年代的石油危机中,是由NASA 提出的设计概念,其主要优势是相对于目前普遍使用的涡扇发动机,它可以节省25%~35%的燃油成本[67]。该设计包括单转或者对转的螺旋桨,其中螺旋桨的叶片数量相对较少,叶片直径较小而叶型高度扭曲。20 世纪80 年代,NASA、汉密尔顿标准公司、通用电气公司和道格拉斯公司等机构,对开式转子发动机和开式转子飞机进行了大量试验。然而这些试验项目都没有取得成果,主要原因是开式转子发动机螺旋桨噪声过大,该瓶颈问题没有取得进展,且燃油价格相对石油危机时已经大幅降低,因此开式转子发动机失去了与传统涡轮风扇发动机相比的竞争优势。关于开式转子发动机的发展历史,具体可以参考NASA 格伦研究中心的Van Zante[68]撰写的综述文章。
在近几年,随着各国提出减少碳排放的目标,开式转子发动机,特别是对转的开式转子发动机,重新受到了各国学者的广泛关注,每年都有大量的试验、理论和计算研究发表在航空航天和气动声学领域的重要期刊[69-74]。螺旋桨的气动声学问题,成为了开式转子发动机研究中最重要的问题之一。
混合动力飞机主要由涡轮和电力驱动,在近年也受到了一些机构和学者的关注,是未来飞机设计的可行方向。在过去几年,NASA 与波音公司合作,先后提出了亚声速超绿飞机、N3-X 型混合动力的翼身融合布局飞机和STARC-ABL 涡轮电动飞机等设计概念[75-77];空客公司提出了E-Fan X 混合动力飞机的设计概念;而其他的中小型飞机制造商也对未来混合动力飞机的设计进行了规划。在学术界,各国学者对混合动力飞机开展了研究[78-80],不过目前发表的工作大多局限于小型混合动力飞机的设计。而对于纯电动飞机,目前发动机的功率和电池存储等瓶颈问题还难以解决。因此可以预见,混合动力飞机将在未来具有更高的可靠性和更大的潜力。
3.2 无人机
如上文所述,根据图1 统计的近年来AIAA/CEAS气动声学年会的研究数量来看,除了螺旋桨自噪声、涡轮机械问题之外,无人机的气动声学问题也受到学界越来越多地关注。无人机在城市运输系统和军用侦查等方面具有可观的前景。
与航空发动机和水下螺旋桨的雷诺数普遍在数十万到上百万不同,典型的无人机螺旋桨的雷诺数在数万到上十万范围。因此,作为低雷诺数螺旋桨,无人机螺旋桨的流动现象和声学特性也与高雷诺数螺旋桨有显著区别,具体表现为流动更易分离、转子和流动结构的相互干涉更为复杂等。对无人机螺旋桨噪声问题的关注始于2016 年,美国航天局兰利研究中心的Zawodny 等[81]在消声室中,对无人机二叶螺旋桨的自噪声进行了试验测量。结果表明,无人机螺旋桨的远场声压谱由三个部分组成:除了低频的宽带部分、叶频及其倍频附近的宽带峰值之外,还有频率在数千到上万赫兹的转子后缘噪声。
螺旋桨叶片与来流湍流的相互作用是噪声和不稳定载荷的主要来源。对于主要在低雷诺数工况下工作的无人机螺旋桨,其流动和声学现象与传统的高雷诺数螺旋桨有明显不同,并且尚未得到广泛研究。2020 年,北京大学的陈望桥、黄迅等[82]发展了新的时频域声成像方法,并结合粒子图像测速技术(particle image velocimetry,PIV),对无人机螺旋桨的转定干涉流动现象和声源分布进行了研究。试验结果表明,声源的分布以及主要声源的频率变化,与转定干涉过程具有直接的联系。随后,他们对无人机螺旋桨在剪切层中的噪声进行了试验研究[83]。声成像的试验结果表明,后缘噪声主要来自叶尖部分,且剪切层与螺旋桨之间的相互作用通过减小叶尖涡来抑制后缘噪声。最近,黄迅课题组的吴佳峰[84]基于延迟分离涡模拟方法,对无人机螺旋桨的转定干涉现象进行了数值模拟研究。该工作解决了现有实验技术中的一些测量难题,例如对叶片边界层流动和叶片表面声源的分析。数值模拟的结果表明,来流湍流会在叶片边界层引起层流分离,并主要在叶片前缘产生声源;层流分离的出现取决于叶片截面与局部速度的夹角。该研究对叶片之间的旋转相关性进行了定义。分析表明,叶片之间的旋转相关性在叶片前缘处最强,在叶片尾缘、叶尖和叶梢处会因为尾缘脱落涡和叶尖涡等流动结构的影响而减弱。
2021 年,代尔夫特理工大学的Casalino 等[16]和法国国立高等航空航天学院的Gojon 等[17]分别对无人机螺旋桨自噪声的基线问题进行了定义。Casalino首先在消声室中对无人机二叶螺旋桨的自噪声进行了测量,然后与叶素动量理论(blade element momentum theory,BEMT)和格子玻尔兹曼数值模拟方法预测的结果分别进行对比,数值模拟结果与试验测量结果取得了较好的一致性。香港科技大学的姜汉博、张欣等[85]对无人机螺旋桨的唱音噪声的辐射模态和辐射效率进行了研究。他们在球坐标系中建立了厚度噪声和载荷噪声的预测模型,将数值模拟得到的流动变量作为输入,并与消声室中的试验结果进行了对比和验证。模型预测结果与试验测量结果取得了较好的一致性。研究还表明随着噪声源接近旋转中心,各模态的辐射效率迅速降低。因此,在设计低噪声螺旋桨时,径向的气动载荷应当受到重点关注。
此外,各国学者也对转子叶片表面的流动分离过程[86]、转子与圆柱的相互干涉过程[87]、多转子系统[14]等问题进行了广泛研究。
3.3 水中装备
螺旋桨噪声、机械噪声和水动力噪声是船舶和潜艇等水中装备的三大主要噪声来源。螺旋桨噪声是螺旋桨旋转时所产生的噪声,主要包括螺旋桨的空泡噪声和流致噪声,其中流致噪声又包括边界层吸入湍流噪声、导边噪声和随边噪声等。机械噪声主要是推进系统的振动,以及螺旋桨的轴脉动力通过轴系耦合引起的艇体振动产生的噪声。水动力噪声主要非均匀的来流与艇体相互干涉产生的噪声,以及潜艇的指挥台、船舶的定子导叶等结构产生的流动分离导致的噪声组成。水中装备的噪声组成如图5 所示。尽管对水下航行体的主要噪声源至今仍有争议,但普遍的观点认为:在水下高速航行时,螺旋桨的空泡噪声是最主要的噪声源;低速航行或者采用泵喷推进器时,空泡的产生将得到抑制,此时机械噪声和螺旋桨的流致噪声是主要的噪声源。随着船舶和潜艇设计的改进,螺旋桨附近空泡的产生将会推迟,临界航速大幅提高,特别是对于需要在非空化条件下运行的潜艇,空化工况噪声研究的实际意义将不再明显。机械噪声的声压级也随着设计的改进而逐渐减小,这反而使得螺旋桨噪声的研究,成为了船舶和潜艇设计中越来越重要的问题。

图5 水中装备的主要声源Fig. 5 The main sound sources of underwater systems
目前水下螺旋桨噪声的预测方法主要包括频域法和时域法,其中频域法又包括谱方法和相关法。在实际工程应用领域,Blake[23]提出的谱方法计算代价远小于数值模拟方法,因而得到了广泛应用。然而,谱方法等频域法需要通过湍流波数谱和流体动力响应函数对来流的湍流信息进行定义,因此难以考虑非均匀来流和复杂流动结构的影响,对于复杂流动问题的求解能力有限。时域法只需得到螺旋桨的表面脉动压力,即可通过声比拟方法和FW-H 方程[88]求解得到远场的辐射声压级。其中表面脉动压力可以通过试验测量获得,但是对于螺旋桨等旋转部件有一定困难,因此更多的是通过数值模拟方法来计算获得。随着计算机技术的发展,数值模拟的计算代价显著降低,数值模拟方法在水下螺旋桨噪声预测中具有越来越重要的作用。
国际上主流潜艇的声压级如图6 所示。研究表明,水中装备的远场辐射噪声的声压级每降低6 dB,则对方被动声纳的探测距离将缩小50%[89]。而且高速机动时,螺旋桨噪声和艇体流动噪声(乃至流固耦合发声)会严重影响自带声纳的工作性能。因此,潜艇的噪声问题是潜艇设计中最重要的问题之一。
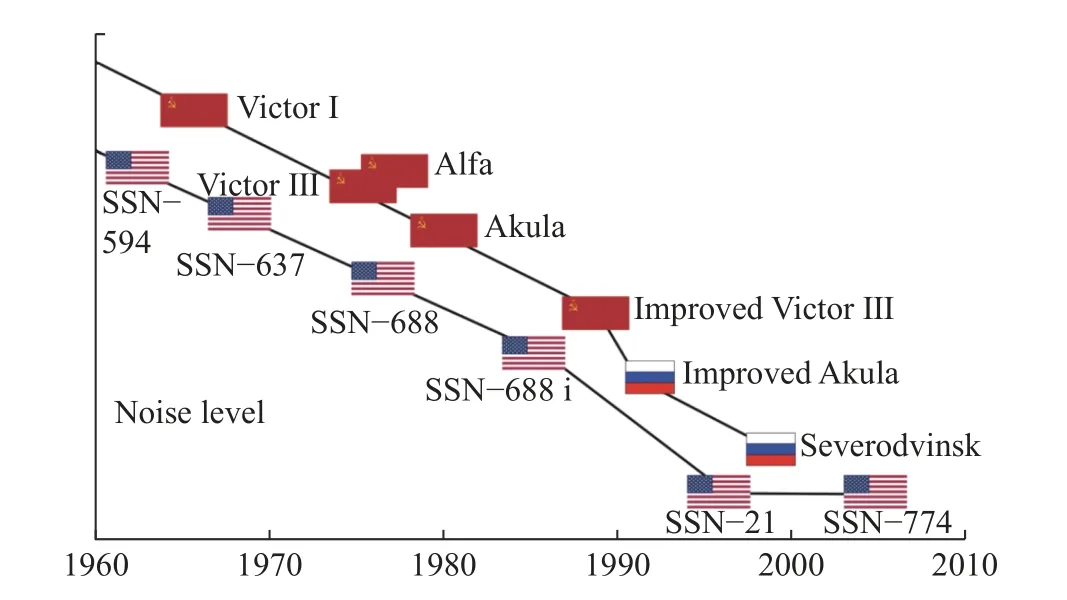
图6 俄罗斯和美国潜艇的声压级(图片来源:维基百科)Fig. 6 The noise levels of Russian and American submarines
除了Sevik[7]的基线试验之外,近年来各国学者对水下螺旋桨也有广泛的试验和计算研究。2012 年,明尼苏达大学的Mahesh 等[90-91]基于大涡模拟方法,研究了DTMB 4381 型5 叶螺旋桨在不同进速系数的倒车工况下的流动特性,并研究了前方是否带有艇体对流动的影响。之后,他们对该螺旋桨在设计工况下的尾流失稳特性进行了数值模拟研究[92]。2014 年开始,意大利国家研究委员会的Mascio 等[93-95]基于分离涡模拟(DES)方法,对INSEAN E779A 型四叶螺旋桨的尾流特性进行了一系列数值模拟研究。
相比于对螺旋桨流动特性的研究,更值得关注的是潜艇螺旋桨、鱼雷和泵喷推进器等实际应用问题中的流动和声学问题。
2013 年,爱荷华大学的Chase 和Carrica[96]对潜艇及螺旋桨开展了具有代表性的研究工作。基于分离涡模拟和延迟分离涡模拟方法,他们对DARPA AFF8 型潜艇和E1619 型7 叶螺旋桨的设置进行了数值模拟,并与激光多普勒测速仪(laser doppler velocimetry, LDV)的试验结果进行了对比。此外,土耳其的Özden 等[97]和Sezen 等[98]也先后对DARPA AFF8 型潜艇和E1619 型7 叶螺旋桨的设置进行了数值模拟研究。
涵道螺旋桨是指被涵道包围的螺旋桨系统,其被广泛应用于船舶、鱼雷等民用和军用领域的推进系统。相对于孤立螺旋桨,该系统具有推进效率更高、气动噪声更低和安全性更高等优点,但对涵道和螺旋桨的外形设计具有较高的要求。2018 年和2020 年,哈尔滨工程大学的郭春雨课题组[99]和武汉理工大学的丁江明课题组[100]先后基于分离涡模拟方法,对涵道螺旋桨尾流特性进行了数值模拟研究。而对于涵道螺旋桨的降噪设计,思克莱德大学的Stark 等[101]将气动声学中广泛使用的锯齿状仿生降噪结构应用于涵道螺旋桨的涵道前缘,用雷诺时均模拟(RANS)预测涵道螺旋桨表面的涡量和压力分布,对不同锯齿外形设计的结果进行了对比。但由于雷诺时均模拟方法无法对瞬态物理机制进行有效预测,因而也无法对涵道螺旋桨的远场声压进行分析。
从上述文献可见,对于水下螺旋桨问题,公开发表的绝大多数文献局限于对尾流等流动特性的研究,而避开了较为敏感的水下声学研究。特别对于当今国际上主流核动力潜艇采用的泵喷推进技术,能找到的公开发表的文献少之又少,且大多数来自中国学者[102-104]。因此,研究和改进泵喷推进系统的流动和声学特性,以及对下一代的潜艇的推进系统进行设计,例如能够有效解决梢隙流动和轴系振动问题的无轴推进系统,仍然是当今工业界和学界亟需解决的重要问题。
4 小结和展望
螺旋桨噪声是航空航天和水中装备领域的重要问题。经过近60 年的研究和发展,在理论、试验和计算等方面已经取得了不少突破,其研究成果在航空发动机、舰船和潜艇等领域有广泛的应用。但实际应用中,螺旋桨噪声问题涉及时间和空间上非均匀各向异性的湍流来流,乃至多尺度的湍流结构与叶片之间的复杂干涉作用,因此对于螺旋桨噪声问题中的物理机制,学术界仍存在较大争议。甚至对于已经提出数十年的螺旋桨吸入湍流噪声的基线问题,各国学者虽然已经开展了大量研究工作,但对于理论模型的建立以及背后的物理机制,至今尚未完全达成共识。
我们认为螺旋桨噪声问题的研究,主要有以下三个方向具有发展前景:
首先来自于实际工程问题的需求。纵观螺旋桨噪声乃至气动声学研究的发展历史,可以看出工程实际需求与学术前沿研究并不是割裂的,大多数时候前者为后者指明了方向,促进了理论和试验技术的发展。由于我国一系列重大问题,特别是国防领域不断提升的需求,以及面向未来的绿色环保飞行器等设计的需求,螺旋桨流动噪声问题的研究具有越来越重要的意义。对于一些重要的军事应用领域,比如水中装备的螺旋桨流动噪声问题,在国外公开发表的文献中几乎找不到可供参考的资料,这对我国的理论和试验技术的发展提出了更高要求,需要结合实际问题进行研究和创新。
其次是基本问题中的物理机制。研究螺旋桨噪声基本问题中的物理机制,不仅可以促进湍流噪声理论的发展,还能对实际工程应用有较大的助益。一些实际应用问题中包含了多个物理机制,比如泵喷推进器中包含了边界层吸入、转定干涉、梢隙流动和轴系耦合等问题。对于这些复杂的实际问题,深入研究基本问题的机制,有助于区分各物理机制对远场辐射噪声贡献的主次,为进一步优化设计提供支持。
最后是新的数值模拟方法和试验技术的推动。随着计算机算力的不断提高,以雷诺时均模拟、大涡模拟以及分离涡模拟等方法为代表的数值模拟方法在近年来逐渐成熟,并得到广泛应用。在今后,数值模拟方法的发展将使对复杂流动现象的高精度模拟成为可能,从而为分析和理解背后的物理机制提供支持。而对于试验技术,特别是要将气动声学试验研究中普遍使用的声源成像和PIV 等技术应用于水下螺旋桨,以及实现对高速螺旋桨的高精度试验测量技术,目前还存在较大的挑战,最大问题来源于信噪比和分辨率等因素的限制。因此,如何对现有的试验技术进行创新,乃至发展新的试验技术,是目前螺旋桨噪声问题研究中需要面对的问题。