基于LED警示标志的桥区船舶诱导技术及实现
2022-07-11谭志荣屈文鹏陈国成张义军明洋林
谭志荣 屈文鹏 陈国成 张义军 明洋林
(武汉理工大学航运学院1) 武汉 430063) (内河航运技术湖北省重点实验室2) 武汉 430063)
(湄洲湾引航站3) 莆田 351100) (长江航务管理局4) 武汉 430014)
0 引 言
当船舶航行至桥区时,容易发生撞桥事故,夜间能见度低,也会影响船舶航行安全.山区河段一般没有布设景观灯,桥区视线暗,加之驾驶员可视距离受山体、复杂通航条件等因素影响,给船舶航行带来较大安全隐患.
在山区设置桥梁灯光引导系统,可有效提高船舶的通航安全,减少水上交通事故.郭辰等[1]研究了桥区灯光与船舶航行安全之间的关系,分析了南京长江二桥和苏通长江大桥兼顾美观与通航安全的灯光设计特点,提出了桥梁景观灯的设计要点.
目前,针对光学引导的应用主要包括菲涅尔光学引导系统和艾科尔斯光学引导系统,使用LED光源引导登陆艇进舱[2-3].艾科尔斯光学引导系统是目前最先进的光学助降引导系统[4-5],该系统由用于远程引导的激光助降系统及用于近程引导的常规光学助降系统组成,通过两类助降系统的结合,可实现长达18 km的舰载机助降引导.李永娟等[6]针对舰船受海浪影响起伏对舰载机起落的高要求,基于应用最为广泛的“菲涅尔”透镜光学助降系统,采取一种基于小波变换算法的信号分析模块,针对舰载机驾驶员对FLOLS光学引导信息感知的模糊特性建立了新型的光学助降系统.陈晨等[7]通过模糊控制理论建立了驾驶员感知模型,根据FLOLS得到高度偏差,向舰载机发出对应的控制指令.
LED在获得大功率及更大亮度的同时,且尺寸小,被视为下一代照明的最佳潜在光源[8-9].二次光学设计是形成窄LED光束的主要方法之一.Allen等[10]设计用于LED均匀照明的自由曲面透镜,系统显示出均匀的照明,且发散半角为6°,效率为70%~92%[11-14].刘国强等[15]基于朗伯型光强分布特性,计算了自由曲面的反射部分的坐标,进行TIR曲面建模,仿真证明光能利用率可以达到90.6%以上.刘未华等[16]通过对LED与LD进行功率、定位的稳定性等方面分析了白光LED的准直性,结果表明白光LED功率稳、发热少、适用于准直测量.
文中在考虑到山区河段桥梁灯光对船舶通航的引导作用的基础上,兼顾节能减排的效果,结合大桥实例分析,利用LED光源设计辅助桥区助航的灯光引导系统.
1 视觉导航方法
目前,灯光助航大多采用环形灯,船员很难找到观察亮点来确定航行路线,并且,桥区水域较短,船舶可能无法确定正确航路.使用不同颜色LED灯(红色、黄绿色和蓝色)划分目标水域,并且设置黄绿色灯光慢闪,其余两种颜色灯光快闪.每种颜色的光都通过特殊的方式限制在很小的发散角上.在船舶进入桥区水域之前,船员通过观察这一水域灯光颜色判断自己的位置,这种方法可以帮助船员夜间在桥区行驶时及时、准确找到正确的船舶航路,进一步保证了船舶的航行安全.
视觉导航流程见图1.当船舶进入桥区水域之前,先会看到灯光覆盖水域,值班船员观察光线,不同颜色的光代表船舶在不同的航路.其中,黄绿色的光代表航向正确,红色代表航向偏右,蓝色代表航向偏左.在行驶过程中不断观察灯光颜色及闪烁频率,以调整行驶方向并在进入桥区水域之前航行到正确的航路上.
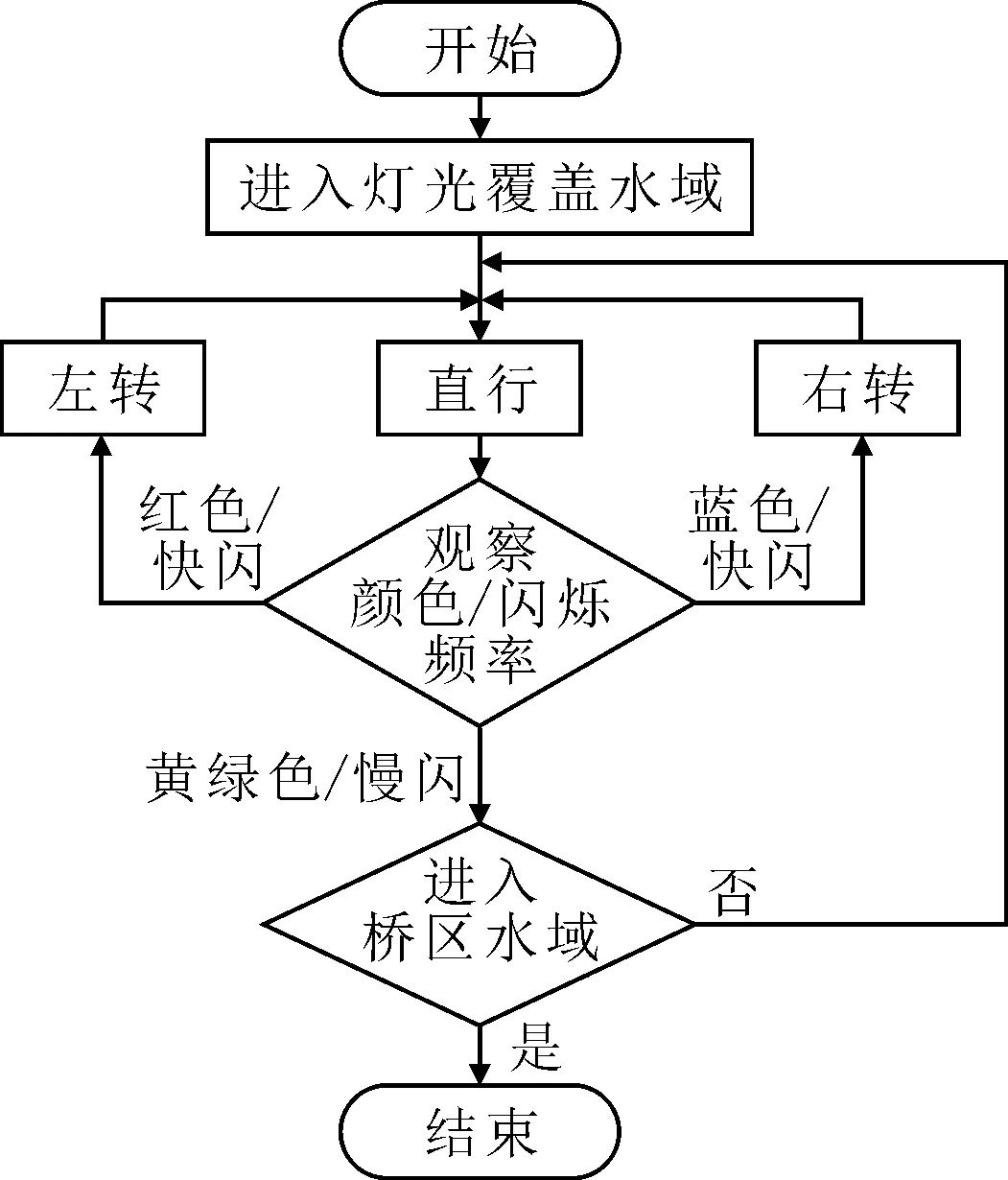
图1 视觉导航流程图
2 导航方案及光路设计
2.1 导航方案
此导航方案需要在桥梁通航孔上方安装三个不同颜色的灯具,照亮进入桥区水域之前的一段水域,行驶在不同区域的船舶可观察到不同颜色的引导灯光,以此来判断航路是否最优.此导航方案的视觉示意图见图2.ABCD是一个平行四边形,代表桥区水域.船舶向Q方向行驶,值班船员观察前方水域,视觉导航系统位于桥梁通航孔Q上方的桥侧面P点照射水面.照射区域EFGH,光线颜色为红色,黄绿色和蓝色.其中,夜间人眼最为敏感的黄绿色灯代表最佳行驶路线.红色灯在最佳路线右侧,蓝色在左侧,并且红色及蓝色灯光快闪、黄绿色灯光慢闪.通过观察光颜色及闪烁频率,船员可以判断船舶正在哪个区域行驶,及时调整航向使他们能够在进入桥区水域之前行驶到正确的航路,并且接下来根据桥区航标的指示,安全的通过桥区水域.
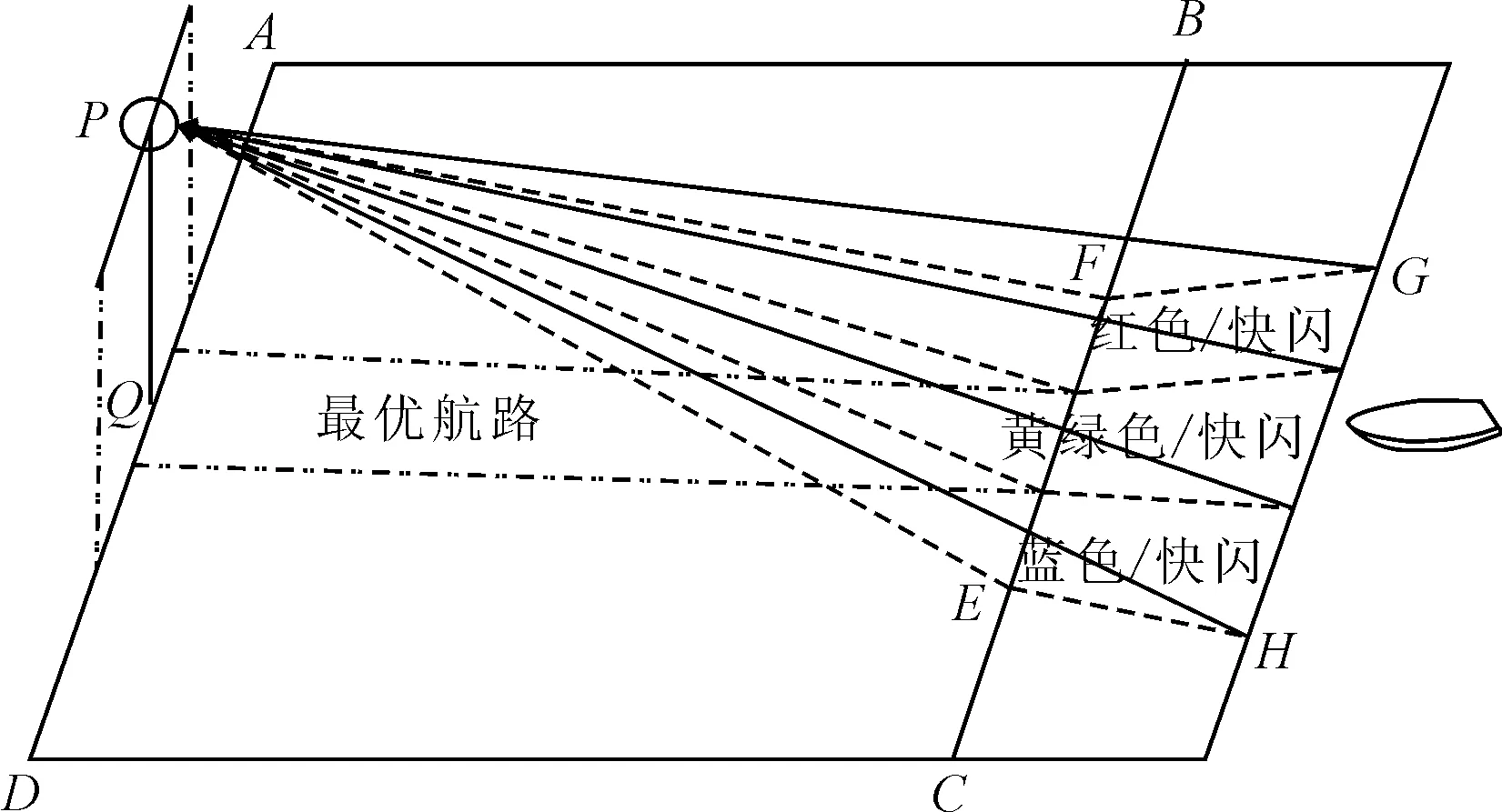
图2 视觉示意图
2.2 光路设计
为了保证行驶安全,安全通过桥区,船舶需要在进入桥区水域之前找到正确的船舶航路,因此需要光线引导船舶驶入桥区水域,依据导航方案可以确定导航系统的光斑形状.为了满足对进入桥区船舶的引航需求,需要垂直方向光束有一定的发散角,照亮较长距离光路.同时水平方向光束保持准直,以减少光束的漫反射.
根据对多数桥梁下水方向桥区航标的调查,选取距离桥梁1 400~2 000 m范围作为设计灯光引导距离,同时选取合适的通航净高18 m以及目标处光路宽度240 m作为设计标准,此时可以计算出理论上垂直方向光线的最大出射角度17.1°,水平方向上发散角不超过6.8°,此时的光学系统可以满足设计要求.
3 光学系统
根据上述光路设计,考虑使用大功率LED、线性菲涅耳透镜和矩形聚光镜建立光学元件,形成光学系统,产生矩形光区域.光路图见图3.
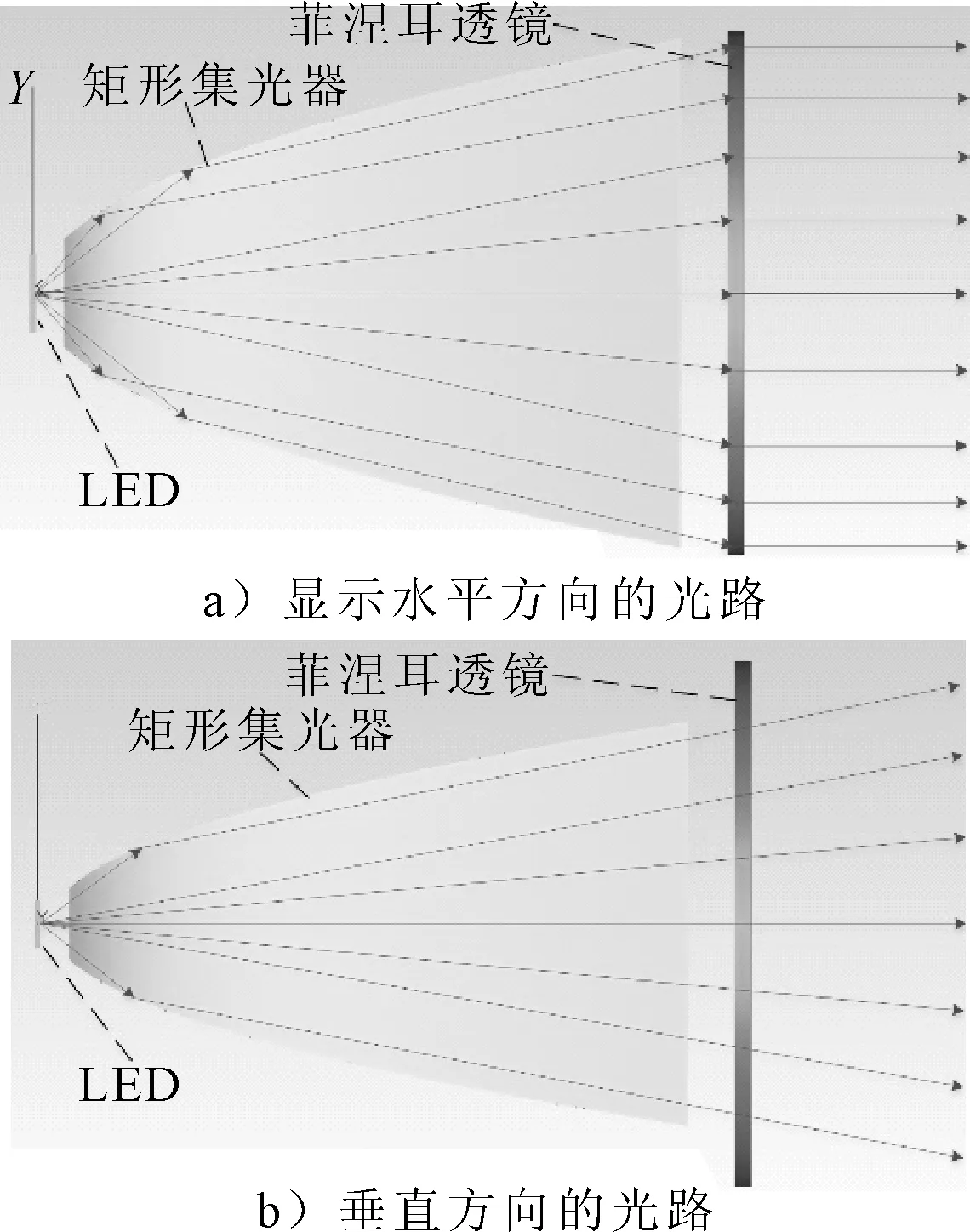
图3 光学系统光路图
矩形集光器由四个抛物面组成,两个相对的抛物面具有相同的焦距,用来保证水平方向和垂直方向产生发散角度不同的均匀光线.内部矩形集光器上覆盖有反射材料的内衬,菲涅耳透镜可以把仅在水平方向上的发散光变为平行光.
LED光源发出发散角大的光束进入矩形集光器.光束穿过菲涅尔透镜水平发散角角度变得比进入集光器之前小,光束可以近似为平行光.矩形区域具有大的长宽比,因为垂直发散角较大,使得光照区域近似为长距离的矩形区域,满足导航方案的需求.
在参数设计时,LED光通量设为1 000 W,发光面积为20 mm×20 mm.菲涅尔透镜尺寸为100 mm×150 mm,焦距300 mm.矩形集光器的两个相对面的抛物线焦距分别为5和7 mm,深度为200 mm,设置接收面距离LED光源2 000 m.根据物理建模及参数设置,此光学元件的水平方向出射光线应为近似平行光,垂直方向光线最大出射角度应为17.1°.
为了验证此光学元件的有效性,使用TracePro软件构建并模拟了此光学系统.通过仿真结果及照度分析,验证实际生成的矩形光斑范围,以此判断此系统的可行性.
仿真结果见图4.光束清楚地在接收面上形成一个矩形亮光表面,中央条带明亮,两边逐渐变暗,为了便于分析,减少杂散光等对照度图的影响,对照度图进行了平滑处置,因此矩形光斑边缘杂散光点不清晰.
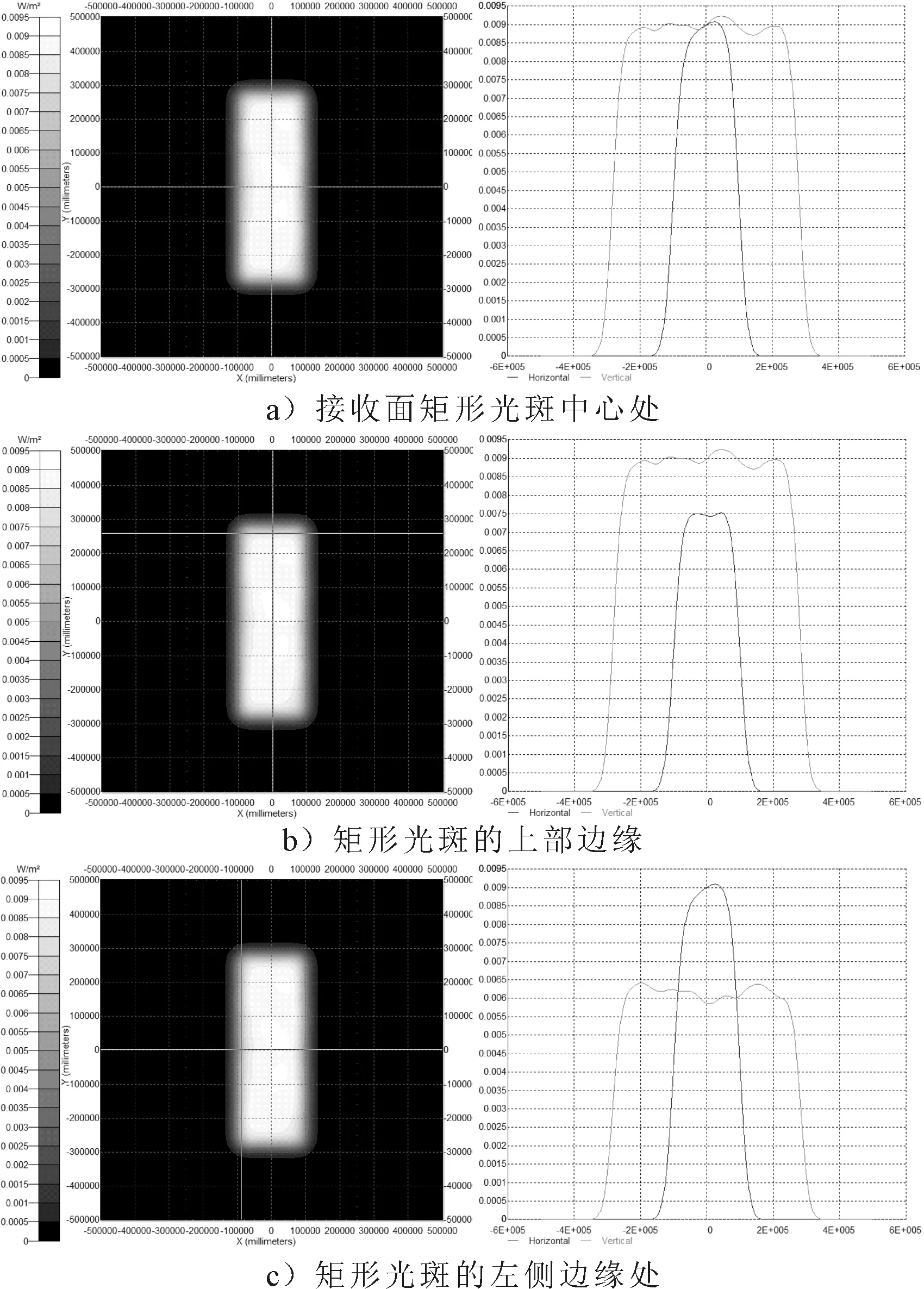
图4 光照度曲线变化图
图4右侧图为左侧图中十字线位置处的水平方向及垂直方向光通量分布曲线,由图4可知:①2 000 m处有效灯光宽度达到180 m;②2 000 m处有效灯光长度达到500 m.
根据设计光线最大出射角度17.1°,理论传播距离最大为600 m;结合实际仿真结果光线有效照射长度约为500 m,因此此灯光系统在垂直方向上的实际有效发散角角度约为14.3°.
结合实际仿真结果光线接收面上水平方向的灯光宽度约为180 m,则实际此光学系统的横向发散角约为5.2°,可以满足水平方向设计光线为近似平行光束,最大出射角度不超过6.8°的设计要求.
考虑到杂散光、光线损失、边缘范围光通量不足等因素,水平方向、垂直方向上的光线发散角度均在合理范围内,仿真结果表明此灯光引导系统可以实现1 500~2 000 m范围内形成180 m×500 m的矩形光斑.
4 实例设计
以奉节长江公路大桥为例,根据上述实验结果进行LED引导系统的设计.奉节长江公路大桥右岸上田至左岸十里村联线,长江上游航道里程213.3 km处.奉节长江公路大桥属于典型的山区桥梁、桥梁没有布设景观灯,桥区河段通航环境复杂,桥区水域上游,距离大桥约2 km处便是河口水域,船舶流量大.
以下水方向为例,奉节长江公路大桥下水方向桥区水域开端——夔门桥右#3距离奉节长江公路大桥约1 300 m.设计最高通航水位为175 m,通航净空高度18 m.
经过仿真计算,在光通量不变的条件下此光学系统可以实现在1 500~2 000 m距离范围内对船舶的清晰引导;其次,引导灯光的纵向发散角约为14.3°.考虑到此桥区水域通航环境较为复杂,并且夔门桥右#3桥区水域起始浮标距离桥梁较近,结合河口位置,确定此引导系统布设范围见图5.
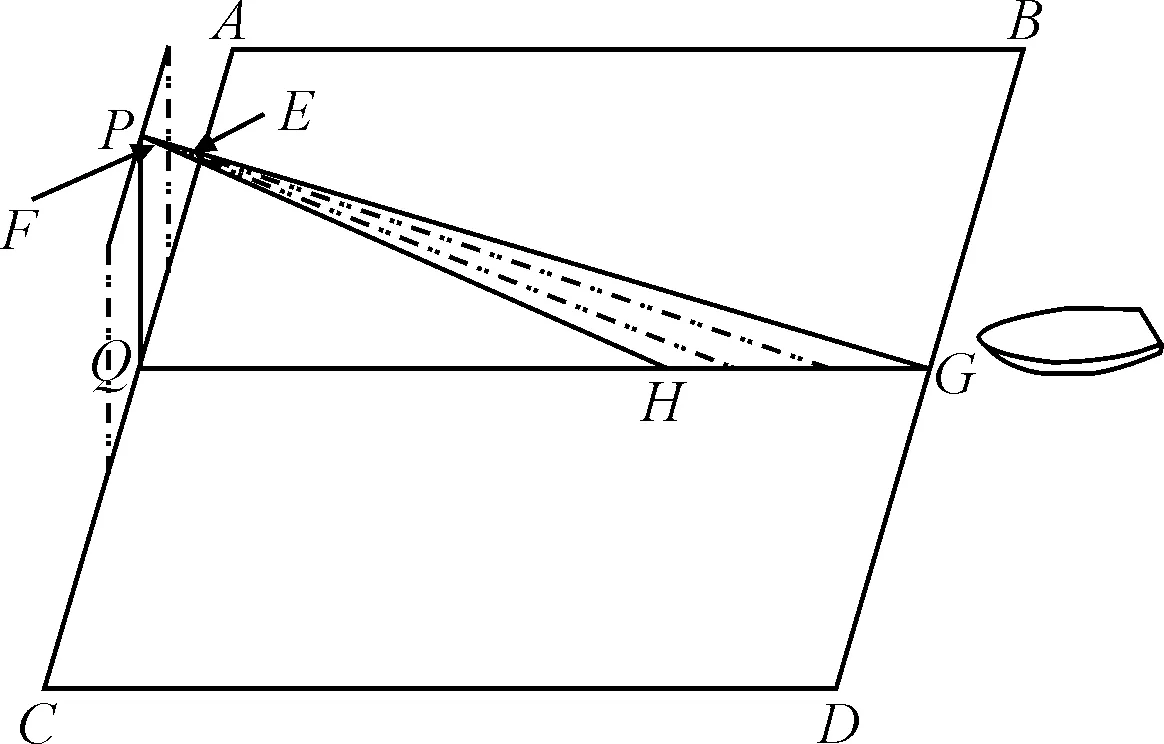
图5 奉节长江公路大桥LED灯光布设距离示意图
ABCD代表从上游河口到大桥之间的河段.QG长2 000 m,P点为桥梁通航孔最佳通过点,PQ距离18 m,LED灯光在垂直方向上发散角E为14.3°,根据三角函数公式计算得F为75°,即此引导系统布设时于垂直方向的夹角;在船舶进入桥区水域之前,在HG水域可观察到引导灯光,船舶及时调整航向准确进入桥区水域,然后便可根据桥区水域航标指示安全通过桥区河段.此系统可以满足通航船舶对于灯光引导的需求.
5 结 束 语
文中提出了使用不同颜色LED视觉导航方法.此方法基于不同颜色、闪烁频率的灯光(红色,黄绿色和蓝色)以划分目标水域.船员根据观察到的灯光颜色确定位置和方向.进行了光学系统的建模和分析,通过模拟结果的实际发散角度,对比水平、垂直两个方向的设计最大发散角度约为5.2°,光束水平发散角满足设计要求.同时垂直发散角为14.3°,也满足设计要求.确保了此引导系统可以完成1 500~2 000 m范围内的光路照射,从而对于即将进入桥区水域的船舶进行提前引导.以奉节长江公路大桥进行了实例分析,通过数理分析评估了布设此光学引导系统的合理性.本系统的优势在于布设成本小、难度低,同时又有较高的可靠性,小范围的光线也不会造成灯光污染.
文中在进行物理建模之后,便采用Tracepro进行仿真,并没有制造实物模型进行实船实验.而且建模过程太过理想化,缺乏温度、湿度等传播介质对光线影响的思考,有待后续作进一步深入研究.
