基于ROS 的智能分拣机器人控制方法研究
2022-07-11陈子豪马润楠雷书砚向云华金山海
陈子豪 马润楠 雷书砚 向云华 金山海
(延边大学 吉林省延吉市 133002)
在当下,信息时代的进程推动着科学技术的快速发展,也影响着人们的生活。物联网(IoT),人工智能(AI)等技术走进了千家万户。尤其是机器人方面的进步方向及应用范围可谓是十分广泛,由工业逐渐转移到了非工业的应用。由于近年的新型冠状病毒传染病所导致的全球范围内的疫情蔓延,许多机器人被灵活运用于测温、人脸识别、二维码行程码实时分析等方面。另外,以“减少出行,居家防疫”为主流的抗疫方式使得人们更加倾向于利用网络来购入日常用品及防护用品。这也引发了物流公司运货量的大幅增加,对于快件的揽收、精准分类以及大量地址数据录入和分析等能力也有了更多需求。同时机器人的使用条件、场地、时间都变得灵活可控,只有想不到,没有做不到。机器人的种类在爆炸式地增长。机器人变得越来越完善,越来越实用。
1 分拣机器人发展现状
近年以来,由于通信时代的飞速发展,互联网应用范围愈发广泛,以网络购物为主流渠道,使得物流运输的利用率逐渐增长,市场占比亦显著提高,预计将成为未来主流服务行业之一。然而,由于大部分物流公司包裹的分类分拣和配送服务仍需人力进行,又由于工作性质及酬劳不匹配等,使得分拣工作难度日益攀升。在“618 购物节”“双11 大促”等大型网购促销活动和春节前后,物流行业面临人工紧缺,劳动力成本不断上升,以及工作效率远低于市场需求等问题。此外,因快递物品种类多样冗杂,包裹形态和大小不统一,分拣标准不规范等,难以进行集中化的批量处理。由于快递物流工作需要高效、准确完成,因此智能分拣机器人便诞生了。若引入完善的智能分拣机器人,通过相机的快速发展和智能分拣机器人系统的融合,则实现快递包裹的快速识别、快速分拣、信息互传等效果将会变得十分可观。机器人不仅可以大幅降低分拣过程中的人力耗费,降低劳动力成本及弹性控制雇佣人员的数量,提高工作效率,增大自动化占比;还可以通过大量可操控的数据信息,控制智能识别条件,提高包裹分拣的准确率。另外,亦可根据具体需求的变化进行相应的灵活拓展,扩大机器人的使用范围。
2 整体设计
分拣机器人应有识别、抓取、放置、储存物品等能力,以及地图构建、智能避障等能力,所以使用机械臂进行抓取、放置物品,工业摄像头进行识别物品的大小形状,在下位机上进行运动的分解和PID 计算,只需要主控通过TTL 串口下发线速度与角速度就可让机器人到达指定位置。
2.1 硬件设计
主要由电机、电机控制板、底座、机械臂、舵机控制板、相机、激光雷达、主板等组成,各个组成部分的参数如表1所示。机器人的结构设计图如图1 所示。
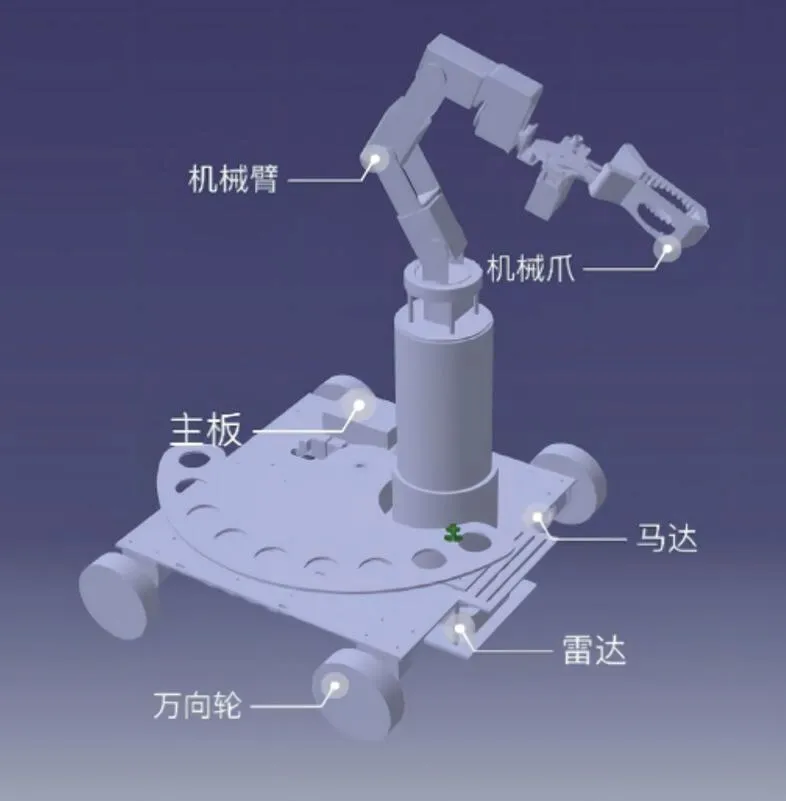
图1:仿真图片

表1:硬件表
2.2 控制系统的方案设计
控制系统我们采用ROS 来接收数据并对整体进行命令传输,通过PC 向ROS 发送指令,ROS 主机再通过摄像头返回的数据向电机和机械臂发送指令。如图2 所示。首先根据地图导航,由雷达进行避障,运行到指定位置。使用机械臂的摄像头进行物品的识别与定位,机械臂抓取物品并放入车上的储存仓。再从储存仓抓取物品到仓库中,完成物品的分拣。

图2:控制流程
3 地图创建与路径规划
3.1 地图创建
在ROS 中,进行导航的首要前提就是地图的创建,地图创建通过SLAM(实时定位于地图构建)的Gmapping 来进行。Gmapping 是通过实时收集雷达的激光返回数据,创建二维地图,此算法的优点是可以实时构建室内环境地图,在小场景中计算量少,且地图精度较高,对激光雷达扫描频率要求较低。场地平面图如图3 所示,实际建图效果如图4所示。
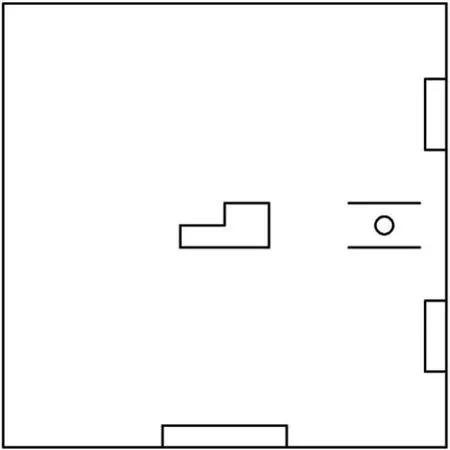
图3:场地平面图
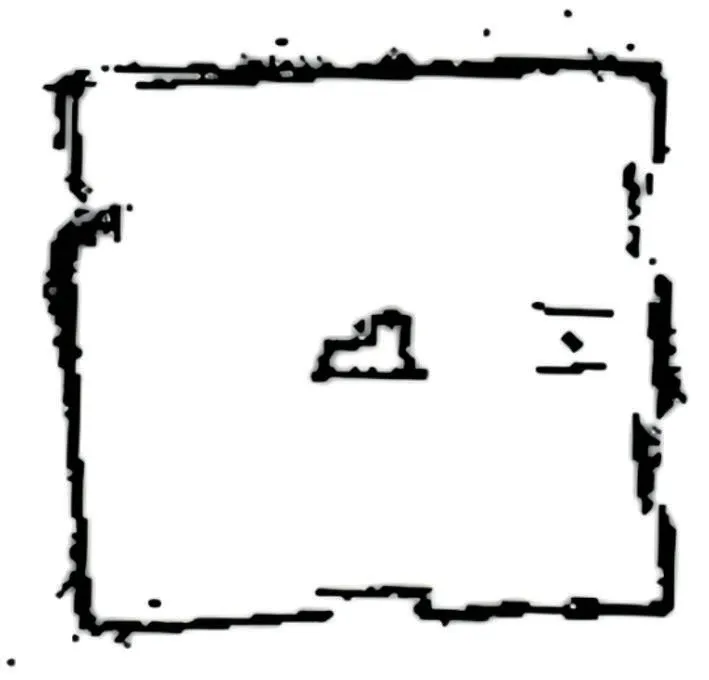
图4:实际建图效果
3.2 路径规划
路径规划包括信息获取-感知-通信-决策-控制-执行,其的目的是寻找一条使机器人从起点到终点不碰到障碍物的路径。路径规划有全局最优规划和实时最优规划两种。
全局最优规划是通过Dijkstra 算法、A*算法、PSO 算法、遗传算法、强化学习算法等计算从起始点到终点的最优解。最优解既可以是时间最短,也可以是距离最短。但其缺点是不能做到实时避障,因为在真实环境中可能有地图创建中没有的障碍物,可能导致机器人偏离终点或不能到达终点。
实时最优规划可以克服上述的缺点,是在全局最优规划的基础上进行局部规划,所以需要机器人进行环境信息的采集和对自身的调整。利用ROS 系统的move_base 功能包,通过雷达对机器人的路径做实时的调整,以防止机器人在自主导航过程中碰到障碍物,所以在本文中使用的是实时最优规划。
4 机器人视觉识别
机器人视觉识别可以采集环境信息和对抓取的物体进行形状、大小、距离的判断、采集和测量,并进行系统分析,将采集到的信息反馈给主控系统,以便于对机器人的其他硬件进行实时的调整。
视觉识别程序设计:
颜色识别采用HSV 色彩空间,可以较高精度地进行颜色识别。形状识别采用轮廓识别和顶点数来判断,先把摄像头传入的图像进行高斯模糊,再分别进行图像灰度化和色彩空间变换,从而输出形状和颜色。如图5 所示。
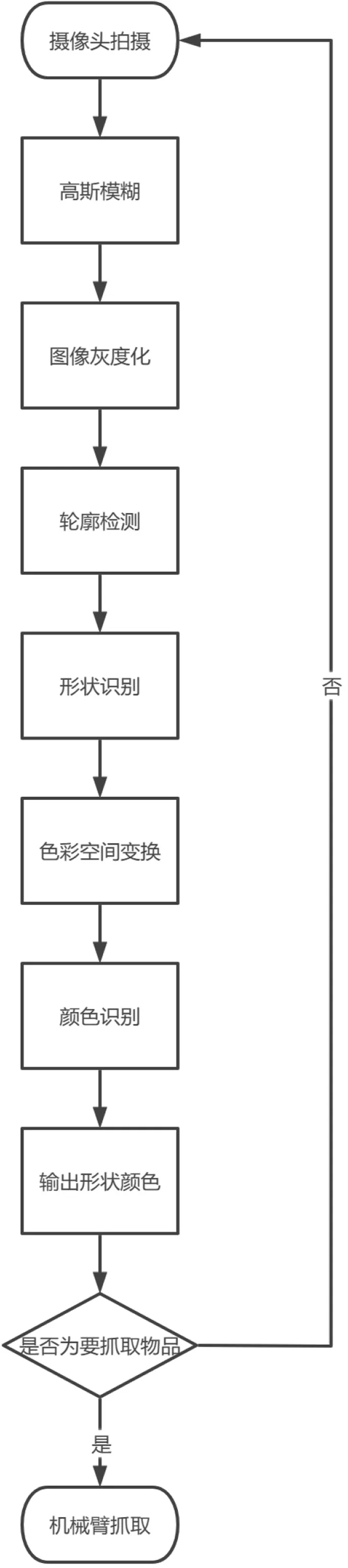
图5:视觉识别流程图
5 机械臂抓取的程序设计
机械臂采用串行总线舵机和六自由度设计。串行总线舵机的优点是体积小、排线简单、控制方便。机械臂使用六自由度设计,可以很好地减少机械臂的死角。
机械臂的程序设计:
使用摄像头和雷达实时监测,如果发现机械手偏离目标位姿,通过控制系统对进行底座和机械臂的实时调整,提升整体的抓取精度。机械臂抓取过程的程序流程图如图6 所示。
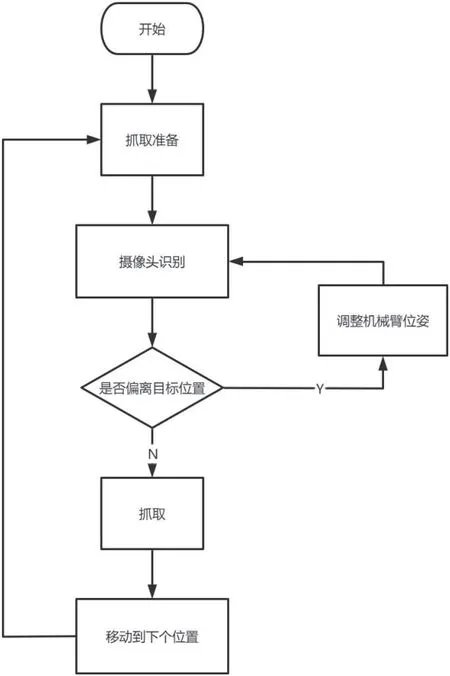
图6:机械臂抓取设计
6 机器人的测试
本文设计的分拣机器人实验样机如图7 所示,同时主要自动导航与进行目标的抓取和投放工作。

图7:出发区
目标物体抓取实验:
实验是从出发区出发,到达指定地点进行抓球,出发区和抓球区如图7、图8 所示。

图8:抓球区
每次抓取识别8 个球,重复抓取15 次,识别成功率为98%,抓取成功率为97%,实际实验过程如图9 所示,实验结果如表2 所示。

图9:实验过程

表2:实验结果
所以本文设计的机器人可以完成目标。
7 结语
本文研究与设计的智能分拣机器人,可以根据需要进行不同形状和不同颜色物体的分拣。利用Jetson NANO 作为主控,ROS 系统具有开源性,底盘和机械臂使用PID 进行控制,摄像头采用OpenCV 进行图像识别。除机械臂、底板和控制系统外所有的机械结构均可以采用3D 打印制作。也可根据场景的不同改变储存仓的形状,为智能分拣的多元化需求提供了新的选择。未来,可以实现多个机器人之间的信息交换,来提升分拣效率。
