基于CAN 总线技术的船舶电子通信系统设计与常见故障分析
2022-07-11张强
张强
(中国人民解放军四八O 五工厂军械修理厂 上海市 200439)
船舶电子通信系统能够实现相关自动化设备/系统之间数据的正常传输,在船舶自动化水平不断提升的过程中,为满足大数据、不间断、多节点的通信要求,则需要对传统电子通信系统设计方案进行优化,在充分发挥CAN 总线技术特点的同时,还应当有效规避CAN 总线技术存在的相关风险,以构建更加稳定的船舶电子通信环境。
1 CAN总线技术概述
电子信息技术在船舶设计领域的广泛应用,使船舶自动化、信息化和智能化水平得到明显提升,同时,为实现船舶自动化设备/系统之间的协同动作,则需要建立更加广泛的电子通信系统。由于不同自动化设备/系统之间的通信机制存在差异,以及线束增加带来的各种问题等,设计人员提出基于LAN 的高速通信技术,即CAN 总线技术,并在此基础上进行了标准化,在多行业领域得到了推广应用。
相比较传统集散通信模式,CAN 总线通信技术具有以下四大优势:
(1)可扩展性强。CAN 总线技术是以局域网为载体,因此,其继承了网络的开放性特点,能够根据系统的实际情况进行自动化设备/系统的扩展。
(2)标准程度高。CAN 总线技术作为世界上使用最为广泛的现场总线技术之一,并通过ISO11898、ISO11519 进行了标准化,在满足该协议的基础上,则可以与总线上其它自动化设备/系统进行通信。
(3)实时性好。根据CAN 总线通信协议,所有自动化设备/系统需要对其传输数据进行编码,从而获取总线访问的优先权,并保证相应节点能够同时接收目标数据,从而显著增强了自动化设备/系统之间通信的实时性。
(4)系统设计简单。由于传统集散通信模式面对多节点设计时存在数据拥堵的情况,系统设计调试周期较长,而CAN 总线通信技术则可以实现故障节点“自锁”效果,从而保证总线数据的正常传输,使系统设计更加简单。
2 基于CAN总线技术的船舶电子通信系统设计
在船舶自动化水平不断提升的背景下,基于控制效率和成本方面的考虑,则需要更加高校、稳定的电子通信系统,传统集散通信模式的缺点较为明显,基于CAN 总线技术的船舶电子通信系统也就得到了广泛应用。
2.1 船舶电子通信系统设计要求
基于船舶空间环境特点,以及船舶自动化设备/系统大量使用的实际情况,为保证相关自动化设备/系统之间数据的正常传输,则需要对船舶电子通信系统设计提出以下要求。
2.1.1 系统高度兼容
船舶作为高价值属性单元,其使用周期较长,在此过程中,船舶自动化设备/系统构成将发生变化,因此,为最大限度避免自动化设备/系统调整带来的影响,在船舶电子通信系统设计中需要考虑未来一段时间内的兼容性。
2.1.2 系统集中控制
船舶自动化水平的提升是一把“双刃剑”,其虽能够提升船舶管理效率,但是,在单一节点故障的情况下,极易引发的不可控的“雪崩”效应。针对这一情况,船舶电子通信系统设计不仅能够对相关节点状态进行检测,同时还可以实现全节点通信状态的集中控制,有效提升船舶自动控制效率,保证船舶航行安全。
2.1.3 系统智能纠错
船舶电子通信系统负责所有在线自动化设备/系统之间的数据传输,由于自动化设备/系统数据传输中受多种因素的影响而出现数据报文错误的情况,为避免有限的船舶电子通信资源被占用,则要求船舶电子通信系统设计中增加智能纠错功能。根据系统智能纠错的实现方式,可以分为“反馈纠错”、“前向纠错”和“混合纠错”三种设计方案,以保证船舶电子通信系统的可靠性和稳定性。
2.2 基于CAN总线技术的船舶电子通信系统设计方案
总线技术的使用改变了船舶自动化设备/系统之间的通信机制,以局域网为载体的CAN 总线技术则进一步优化了船舶电子通信系统架构,而完善的通信协议为其提供了系统化的“软支撑”。
2.2.1 基于CAN 总线技术的通信标准与协议
基于CAN 总线技术的船舶电子通信系统在数据传输效率和稳定性方面较传统电子通信系统明显提升,主要原因在于其采用了更加科学的通信标准与协议。基于CAN 总线技术的通信标准与协议的制定为船舶电子通信系统设计提供了规范性文件,为详细区分基于CAN 总线技术的船舶电子通信系统标准的分布情况,可将其划分为应用层、数据链路层和物理层(如图1 所示),由于相应层级的功能设定存在差异,因此,其适用的标准也存在较大差异。

图1:基于CAN 总线技术的船舶电子通信系统标准构成示意图
(1)应用层。现场总线应用层根据其标准与协议类型可细分为现场总线报文子层和现场总线访问子层,依托智能分布式系统控制器通信接口标准(SDS EN 50325-3)、局域网控制器通信接口标准(DeviceNet EN 50325-2)、开放式总线控制器通信接口标准(CANopen EN 50325-4)与数据链路层提供增强标准(J1939.ISO 11783 NAMEA 2000)实现对船舶电子通信系统状态及对应节点参数的控制,保证船舶电子通信系统的正常工作状态。
(2)数据链路层。数据链路层的标准与协议构成则较为简单,根据其信息传输帧数的不同,主要包括标准帧协议(ISO 11898-1 11-bit ID)和扩展帧协议(ISO 11898-1 11-bit ID),其数据帧结构如图2 所示,标准帧的由11 位ID 标识符和SOF 位构成,而扩展帧则是在标准帧的基础上增加了SRR、IDE 和RTR 位组成,而SRR 在扩展帧中属于仲裁段的隐性位,标准帧中的则是将扩展帧中SRR 位与RTR 位进行调换。

图2:数据链路层扩展帧帧定义示意图
所以,根据数据链路层的通信协议,无论是标准帧还是扩展帧,在数据传输过程中,均会首先发送标准帧位,即ID28-ID18 的11bit 基本ID,而扩展帧的18bit 扩展ID(ID17-ID0)是在标准帧之后发送。
(3)物理层。基于CAN 总线技术的船舶电子通信系统需要通过科学的物理地址进行关联匹配,才能够保证数据传输的正确性,物理层则是依托船舶电子通信设备在不同自动化设备/系统之间搭建的通信网络。物理层能够根据CAN控制器发出的指令灵活调整总线电平,选择最佳信令方案,在考虑船舶电子通信质量的情况下,对基于CAN 总线技术的船舶电子通信系统设计中通信线缆的选择提供参考。
船舶电子通信系统中不同节点对数据传输的要求存在差异,因此,在物理层的设计中,较为常见的CAN 总线标准为ISO 11898-2 和ISO 11898-3 两种。ISO 11898-2 为高速CAN 总线,属于双线平衡信令方案;ISO 11989-3 虽为低速CAN 总线,但同样属于双线平衡信令方案,由于ISO 11898-3 具有较强的容错性,所以,基于ISO 11898-3 的电子通信系统可靠性较高。
2.2.2 系统设计方案
基于CAN 总线技术的船舶电子通信系统在组织架构设计方面更加灵活,由于其涉及平台所有自动控制设备,基于CAN 总线技术的通信网络集约化管理模式,能够保证各自动化设备/系统之间的高度协同,通过上位机可实现对船舶电子通信系统中不同通信节点参数的动态调整,其系统架构如图3 所示。
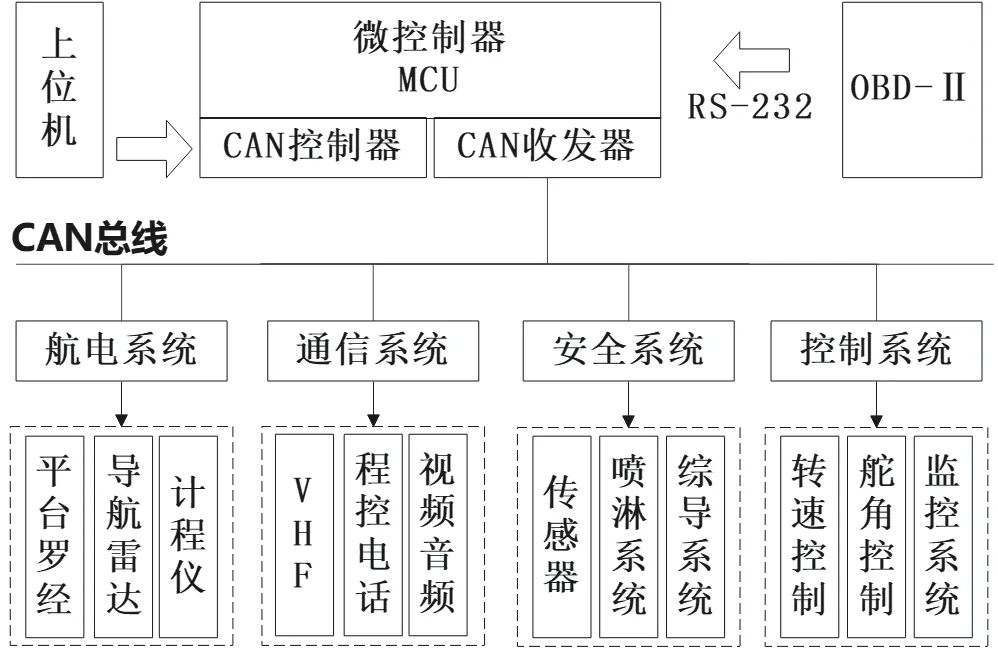
图3:基于CAN 总线技术的船舶电子通信系统架构示意图
CAN 总线技术的应用改变了传统船舶电子通信系统架构,上位机与船舶自动化设备/系统之间的控制关系由点对点转变为点对多,为保证基于CAN 总线技术的船舶电子通信系统正常工作,则需要进一步完善其设计方案。
(1)控制单元设计。基于CAN 技术的船舶电子通信系统控制单元主要包括上位机、微控制器(CAN 控制器与CAN 收发器),在控制单元设计中,需要参考系统控制功能的具体实现方式与要求,从而提高控制效率和准确度,其控制流程如图4 所示。
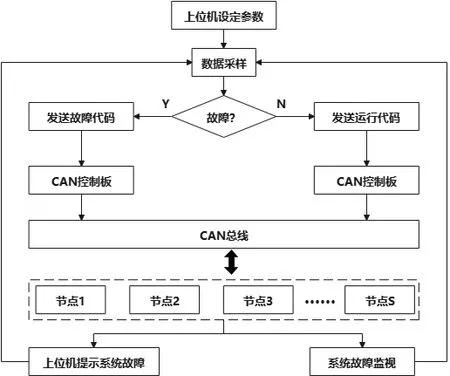
图4:控制单元设计流程图
以上位机、控制器为核心的控制单元能够对系统中不同节点进行控制,并通过系统数据采样后有上位机软件判定电子通信系统是否存在故障。根据ISO 11898-2/ISO 11898-3协议规定,上位机所发出的状态寻位报文为固定帧模式,在无法获取对应节点反馈帧时,上位机则显示电子通信系统中部分节点存在故障。
为提升船舶电子通信系统控制单元的可靠性,在优化其控制流程的同时,也完善了CAN 收/发器为核心的物理传输媒介构成,这里可选择较为典型的差分信号模式(如图5所示),CAN 发送器与CAN 接收器之间通过CAN_Tx 线进行连接,为保证二进制编码准确无误的传输至CAN 接收器,在系统设计中则需要采用差分线的方案,由于CAN 总线网络仅能够识别差分信号,而CAN 收/发器的作用就是将普通逻辑电平信号转化为满足条件的差分信号。
不仅如此,从图5 中左侧通信线缆结构图可以看出,由于差分信号传输仅需要CAN_Tx 和CAN_Rx 两根线,采取交叉绕线的方式,可以有效减少船舶内部复杂电磁空间对信号的影响,使控制单元信号质量更高。
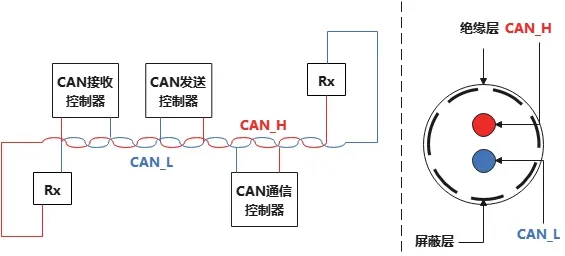
图5:CAN 总线控制单元设计效果图
(2)总线接口设计。船舶电子通信系统设计需要综合考虑不同接口类型的适应性,针对低速CAN 总线与高速CAN 总线的特点,对总线方案进行优化,在保证数据传输质量的同时,还能够提升船舶电子通信系统的电磁兼容性。
图6 中所示L1 为工模扼流圈,其能够更好的适应船舶内部空间中较为复杂的电磁环境,从而起到EMI 滤波的良好效果。不仅如此,该设计对于控制单元的高频交流信号所产生的电磁辐射也能够起到更好的屏蔽作用,从而避免了基于CAN 总线设计的船舶电子通信系统的内生干扰。为保证总线接口设计的合理性,这里将L1 的阻抗设定为120Ω/100MHz-2200Ω/100MHz 之间,根据系统实际阻抗进行可以对其进行调整。

图6:CAN 总线接口示意图
C1、C2 同样能够起到抗干扰的作用,由于电容、电感对交流、直流信号的响应机制存在差异,在设计中应正确选择C1、C2 的范围,为保证相关数据的顺利传输,通常将C1、C2 的电容值设定在22pF-1000pF。图6 中所示C3 为模数转换电路中较为常见的跨地电容,其主要适用于同时存在接口地和数字地共线设计中,该跨地电容需要具有良好的耐压性,在系统整体安全的前提下,其耐压值建议为2600KV以上。
D1、D2 为瞬态抑制二极管,该二极可以实现对系统的静电防护功能,对饮电路功率瞬变所产生的感应电压有着良好的隔断效果,避免敏感元器件因电压波动受损情况的发生。根据该设计方案,D1、D2 应保证关断电压反向耐压应超过3.5V,对于其功率不做具体要求。
这里需要注意的是,在船舶电子通信系统的CAN 总线接口设计中,如果该设备外壳为金属导电材质,且对应电路部分预留了独立接地线路,则该设备外壳可以与CAN 总线接口地(PGND)之间通过隔直电容进行连接,该电容参数设置为1000pF-1500pF。如果该通信系统中设备外壳为非导电材质,则CAN 总线接口地(PGND)可以与系统地之间直接连接,而不需要电容进行防护。
(3)总线节点设计。基于CAN 总线技术的船舶电子通信系统中节点分布缺乏规律,且不同节点之间所传输的数据存在一定差异,在总线节点设计中,需要明确区分节点类型,并从可靠性的角度出发,综合考虑总线节点设计中的隔离、阻抗匹配、总线保护等相关要求,从而保证船舶电子通信系统的稳定性与可靠性。
信号隔离作为CAN 总线节点设计中较为常用的一种技术手段,其能够对信号较为复杂的控制电路与CAN 总线进行隔离,这里需要使用到隔离收发器。[5]例如,隔离收发器可实现高压隔离效果,并通过电气隔离减少共模干扰现象的发生,最大限度降低因高压变频信号对CAN 总线数据传输的影响。除较为常见的信号隔离技术外,还可以选择低功耗的磁隔离技术,或者是在信号通道隔离的基础上,直接采用DC-DC 隔离模块进行电源隔离。
阻抗匹配是指船舶电子通信系统中各节点阻抗连续变化时会影响信号传输质量,其主要表现为非连续状态下的阻抗变化将出现明显的信号反射现象,而整个反射的过程在多个节点中会重复出现,当反射信号相互叠加时,将导致信号传输功率增加,最终影响数据传输质量。针对这一问题,则需要对基于CAN 总线技术的船舶电子通信系统的阻抗进行优化,使其能够在阈值范围以内变化,根据不同节点电阻检测的结果,通过串、并电阻的形式可以对总线节点阻抗进行调整。这里需要注意的是,在船舶电子通信系统设计中,终端节点的阻抗必然会发生突变,这里需要通过接入终端电阻的形式使其与非终端节点电阻之间保持连续性。
由于船舶内部电磁空间环境较为复杂,基于CAN 总线技术的船舶电子通信系统节点之间存在相互影响的情况,尤其是对于高功率控制电路来说,极易对总线上的其它节点产生影响,尤其是对于电压变化对CAN 接收器的冲击。通过增加防护电路,可以避免功率异常等因素导致的船舶电子通信系统可靠性降低等问题。
如图7 所示,该保护电路采用了CAN 收发器模块、DC-DC 信号隔离模块与信号隔离模块,由此,则实现了基于CAN 总线技术的船舶电子通信系统的集成优化,在提高系统可靠性的同时,降低了系统设计的复杂程度和缩短了系统开发周期。
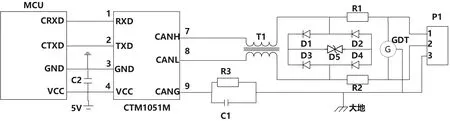
图7:CAN 总线节点保护设计示意图
(4)总线协议设计。基于CAN 总线技术的船舶电子通信系统设计需要进一步规范相关设备/系统所使用的协议,目前,CAN-Bus 在通信系统中的使用有效提升了其通信质量,在此基础上,通过明确总线协议的方式提出通信时序约束、编码规则,并区分不同层级通信协议之间的差异,从而更好的发挥CAN 总线技术在船舶电子通信系统中的优势。
首先,统一时序约束。基于CAN 总线协议的数据通信需要对其发送内容进行编辑,为保证通信系统中不同节点数据发送行为的有序性,在系统设计中,需要对不同节点设备/系统的比特率(bps:单位时间内设备/系统所传输的二进制位数)和波特率(Baud:单位时间内设备/系统所传输的符号数量)进行统一设定。通过规范CAN 总线时序协议,增加统一时钟设计,使船舶电子通信系统的通信周期保持稳定,如此,则可以避免因时序混乱导致的通信系统工作状态异常等问题发生。
其次,完善编码规则。CAN 总线功能的实现需要相关节点遵循统一的编码规则,即通信设备/系统在对外发送数据之前,需要对数据进行重新封装,除主体数据外,为保证数据传输的准确性,还需要增加节点ID、优先级、校验等相关内容。例如,平台罗经通过CAN 总线想船舶综合导航系统发送航向、姿态等数据信息,经系统编码后应遵循NMEA2000 协议,同时,为符合国际无线电通信管理要求,即通用ITU-RM.1371-5 协议,其二进制编码包括数据帧、应用标识符、应用数据三个部分组成,具体如表1 所示。优化后的编码规则可以实现船舶内、外通信协议的统一,减少多次解析造成的数据错误等问题发生。
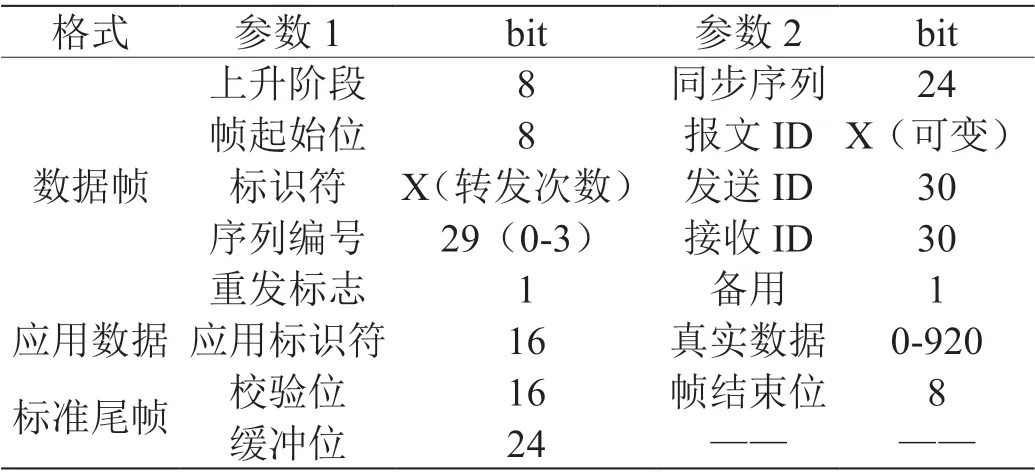
表1:基于TU-RM.1371-5 协议的CAN 总线通信报文格式
最后,优化高层协议。基于CAN 总线技术的船舶电子通信系统主要包括应用层、数据链路层和物理层,而应用层在作为船舶电子通信系统的核心控制单元,在系统协议体系中属于高层协议范畴。如表1 所示,应用数据中标识符位数为16,由于CAN 协议中对于标识符的显性位有着明确规定,这也说明了该设计方案中发送ID 和接收ID 位数设定为30的原因,这基本满足了船舶电子通信系统节点扩充的要求。即便通信设备/系统需要介入CAN 总线,可以设定二级总线的形式进行扩充。在优先级方面,除通过ID 进行判定外,还可以建立优先级可编辑帧(建议选择数据帧中的备用位),从而灵活调整不同节点数据的优先级。
基于CAN 总线技术的船舶电子通信系统设计应当强调其继承性,通过优化总线控制单元、接口、节点和协议等,能够以最小代价提升船舶电子通信系统的可靠性和稳定性。
3 基于CAN总线技术的船舶电子通信系统常见故障分析
CAN 总线技术在船舶电子通信系统中的应用解决了传统集控模式下的干扰问题,并能够在规范总线协议的基础上实现通信设备/系统的节点式管理,优化船舶电子通信系统接口形态。然而,基于CAN 总线技术的船舶电子通信系统依然存在诸多故障,且不同故障所产生的影响也存在一定差异,这里通过以下几种典型故障进行介绍。
3.1 数据位错误及应对策略
基于CAN 总线技术的船舶电子通信系统中的数据是以帧的形式进行传输,当CAN 总线系统电平与节点设备/系统输出点评之间差异超出阈值后出现的一种错误。船舶电子通信系统中物理层可以通过发送单元、接收单元的对数据帧进行校验,以及时发现存在数据位错误的节点设备/系统。
关于数据为错误的处理需要在定位故障节点后,对节点输出电平进行检测,在强化内部电路屏蔽的同时,选用交叉屏蔽线缆传输模拟信号,减少因干扰信号叠加导致的电平异常问题。与此同时,对于接收端的数据位错误问题,在需要采取双向校对补偿机制,以保证数据的准确传输。
3.2 填充错误及应对策略
为保证CAN 总线数据帧的准确性,在其数据帧中如连续出现五个相同的位时,则需要在第六位插入相反的位,即电平翻转,也被称为总线数位填充机制,其适用于起始段、仲裁段、控制端、与校验段。因此,如果在数据帧中连续出现六个或六个以上相同的位,则意味着该电子通信系统出现了位填充错误。
位填充错误的出现其主要原因包括计数问题和电平干扰两种,针对计数问题需要在应用层对持续电平计数进行分析,保证反相数位准确填充;对于位填充错误中的电平干扰,则需要通过优化差分电路设计对干扰信号进行屏蔽,同时对关联节点输出电平进行分析,优化总线节点布局,避免同频节点之间相互干扰导致的填充错误。
3.3 格式错误及应对策略
CAN 总线技术优势的体现是不同报文格式之间可以实现无障碍的通信,然而,由于报文中存在一定数量的非法位,导致船舶电子通信系统中不同节点之间无法按照约定机制进行通信,即接收到的帧和规定的帧格式不一致。根据格式错误的形成机制可以分为主动错误、被动错误和总线关闭三种类型,主动错误是CAN 总线节点设备/系统在数据传输过程中发生格式上的错误,其特征为REC&&TEC∈(0,127);被动错误的判定条件为REC ||TEC∈(127,255);当CAN 总线TEC ≥255 时,则总线将临时关闭该节点的数据收发权限,但并不影响总线其它节点之间的数据传输。这里需要注意的是,无论是主动错误还是被动错误,总线节点的数据收发功能不会受到影响。
针对格式错误的应对策略较为简单,当判定格式错误为主动错误时,则需要对CAN 总线节点设备/系统进行复位处理。而被动错误则是在判定对应节点数据不可信,在CAN 总线数据传输中将不允许该节点数据不参与系统数据处理,避免破坏系统数据,同样可以采取复位处理方式。对于总线关闭错误则需要将故障节点设备脱离CAN 总线,对导致收发错误计数器溢出的原因进行分析,对电平、功率等导致的数据帧进行校验,调整CAN 收发控制器参数,保证CAN 总线节点设备/系统状态。
4 总结
CAN 总线技术在船舶电子通信系统中的应用,改变了传统集控式通信管理模式存在的不足,通过优化系统总线设计,能够进一步提升船舶电子通信系统对差异化通信设备/系统的适应性。然而,在考虑CAN 总线技术优势的同时,也需要高度关注其中存在的问题,在船舶电子通信系统进行针对性的改进,以提升基于CAN 总线技术的船舶电子通信系统的通信质量。