电力物联网智能电池管理系统的设计
2022-07-11常明丁忠林吕超
常明 丁忠林 吕超
(南京南瑞信息通信科技有限公司 江苏省南京市 210003)
1 引言
随着电力工业及互联网技术的飞速发展,电力物联网正成为世界能源革命的重要发展方向,当前煤炭等不可再生资源依然是电力生产的主要能量来源,为解决当前及今后面临能源紧缺问题,世界各国都在大力推广水力发电、风力发电、光伏发电、地热发电等新能源发电模式,其中能量储存再利用成为新能源发展重要难题, 而电池管理技术作为能量存储转发的关键技术在促进新能源高效利用方面起到了越来越重要的作用,蓄能电池在发电、变电、配电及用电的所有环节都有应用,在电力物联网建设中具有至关重要的作用,电池寿命、储能效率、充放电效率、发热、绝缘安全等问题都是电池管理系统研究的重要难题。
2 电池管理系统总体结构设计
电池管理系统总体结构如图1 所示,其由1 个主控制单元、1 个人机界面单元、16 个电池测量单元(BMU)和16 个电池均衡单元(BBU)构成,系统需要完成电池组单体电压采集、均衡、温度测量、SOC 计算并根据实时检测的数据控制电池组工作状态等功能,由BMU 和BBU 完成单体电压采集、均衡和温度测量,由主控制器完成SOC 计算、总电压测量、电流检测、正负母线绝缘电阻检测和与通信模块通信功能。将160 块3.2 V 磷酸铁锂电池串联起来形成高压电源为电网系统设备提供动力源,由于单体电池数量较多,因此为避免系统的复杂化并提高系统的抗干扰能力,将电池分组为16 个串联电池包,每个电池包由10 块电池串联,每个电池包对应一个BMU 和BBU 单元,整个系统内部各单元通过控制器局域网络(Controller Area Network,简称CAN)总线进行通信,主控制器通过USB 与无线通信模块进行通信,实现远程监视和控制,形成了具有远程无线通信的分布式CAN 总线网络结构。

图1:电池管理系统总体结构
3 电池管理系统硬件设计
3.1 单体电池检测模块设计
单体电池电压和温度的测量通过BMU 单元完成,BMU单元配置一块C8051F500 单片机,C8051F500 自带12 位模数转换器(ADC),其转换速率可达200ksps,足以满足系统检测精度和速度要求。本系统采用如图2 所示的单体电池检测方案,为方便叙述,图中只画了2 节电池及其检测途径,S1、S2、S3、S4 为双刀单掷继电器AQW216,每个单体电池受两个继电器的控制,C1、C2 为采样电容,所有采样电容同时充电和放电,以保证各单体电压测量值为同一时刻的电压值。例如,充电时,S1 闭合,S2 断开,BT1 对C1 充电,同时S3 闭合,S4 断开,BT3 对C2 充电;放电时,S1 和S3断开,S2 和S4 闭合,将各单体电池采样电容的电压信号送到多路选择芯片MAX306,控制器通过分时选通MAX306的各输入通道,对各单体电池分时进行AD(模数)采样。

图2:BMU 模块原理图
电池组在工作时会产生多余的热量,系统必须实时监测各电池包的温度,确保电池工作在正常的温度范围内,为此,系统为每个电池包配备若干个DS18B20 温度传感器,这样处理器可根据检测到的温度情况控制电池的工作状态,当温度达到一定值时,处理器就发送命令减小充放电电流或者停止电池充放电。DS18B20 为单总线传输器件,测量温度范围为-55 ~125 ℃,精度为±0.5 ℃,满足测量精度要求,其输出结果为数字量温度值,既能节省I/O(输入/输出)口资源,又具备简单的电路连接结构,在测量单元中对DS18B20 采用了单总线隔离驱动技术,使测温电缆长度可达100m 以上,温度测量点可达100 点以上,大大提高了温度测量的可靠性和稳定性。
3.2 单体电池均衡控制模块设计
单体电池的不一致性是由于其制造工艺、初始容量、环境温度、循环充放电次数等多种因素造成的,这种不一致性会影响电池的性能。为提高电池的性能并延长电池的使用寿命,设计如图3 所示的基于BUCK-BOOST(升降压)变换器的均衡控制方案,相邻两单体电池间由储能电感和两互补的MOS 管构成双向直流变换器(DCDC),通过控制脉宽调制(PWM)的占空比,控制相邻单体控制开关管轮流导通的时间,实现相邻单体电池之间的均衡,以单体电池B2和B3 之间的均衡过程为例,M3、M4、L2 构成双向DCDC变换器,当B2 电量大于B3 时,首先M3 导通,M4 断开,由B2 对电感L2 充电,然后M3 断开,M4 导通,由电感对B3 充电,M3、M4 开关状态保持时间受相应PWM 信号占空比控制。
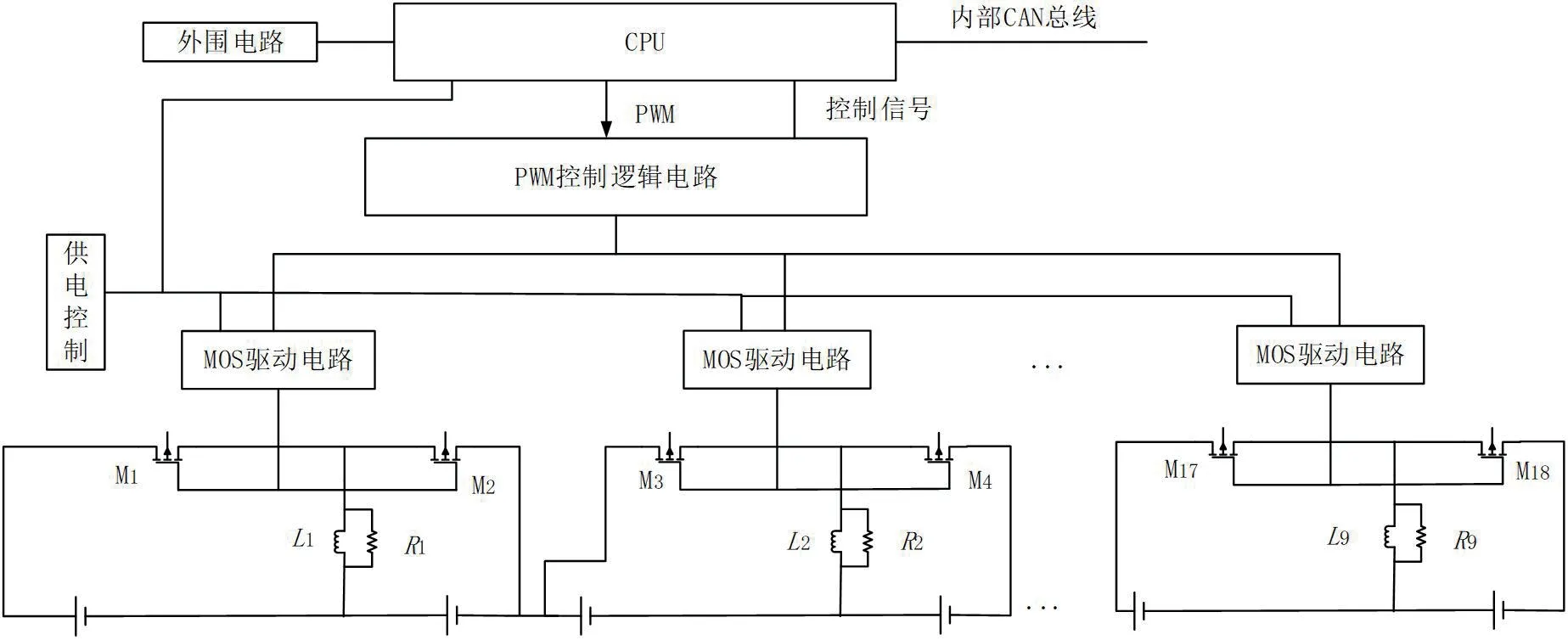
图3:BBU 单元的硬件组成
为提高均衡效率、减少能量损耗,系统采取以下控制策略:采用基于单PWM 信号的双向DCDC 的供电控制技术,只有当PWM 信号有效时(按某一占空比动态变化),才会启动双向DCDC 供电;采用电荷泵升压技术代替直接采用单体电池供电,将门极驱动电压提升到5 V 以上,可有效降低MOSFET 导通电阻,提高DCDC 转换效率;在典型的BUCK-BOOST 双向DC/DC 驱动控制中,一般均利用MOSFET 体二极管或外并肖特基二极管进行续流,由于续流二极管的导通电压一般都在0.4V—0.7 V 之间,由管压降造成的能量损耗较大,例如,当续流电流为2 A 时,在续流二极管上消耗的功率就可达到0.8-1.4 W,为此,采用同步整流技术,即通过MOSFET 驱动电路在续流期间控制对应的MOSFET 导通,从而大幅度降低续流功耗,一般小功率MOSFET 的导通电阻为20—50 mΩ,同样当续流电流为2 A时,所产生的功耗仅为0.04—0.1 W,比采用二极管续流功耗降低10 倍以上。
3.3 主控制模块设计
主控制模块是电池管理系统的核心,其处理任务较繁重,为提高主控制模块的处理速度,在硬件设计上为其配置两个处理器,硬件的组成结构如图4 所示,其中,CPU1 通过内部CAN 总线与电池管理系统内各模块通讯,主要接收并处理来自内部各单元的单体电压、电池组温度及报警状态等数据信息,并实时检测母线电流和总电压,CPU2 通过外部CAN 总线与本地人机界面数据交换,并通过USB 接通信模块实现与远程监控平台的通信,而采用主从式并行通讯方式实现CPU1 和CPU2 之间数据传输,将CPU1 作为主处理器,CPU2 作为从处理器,主处理器周期性地向从处理器发送中断请求信号,当从处理器做出中断响应时,主处理器开始通过并行输入输出口向从处理器发送或接收数据信息。
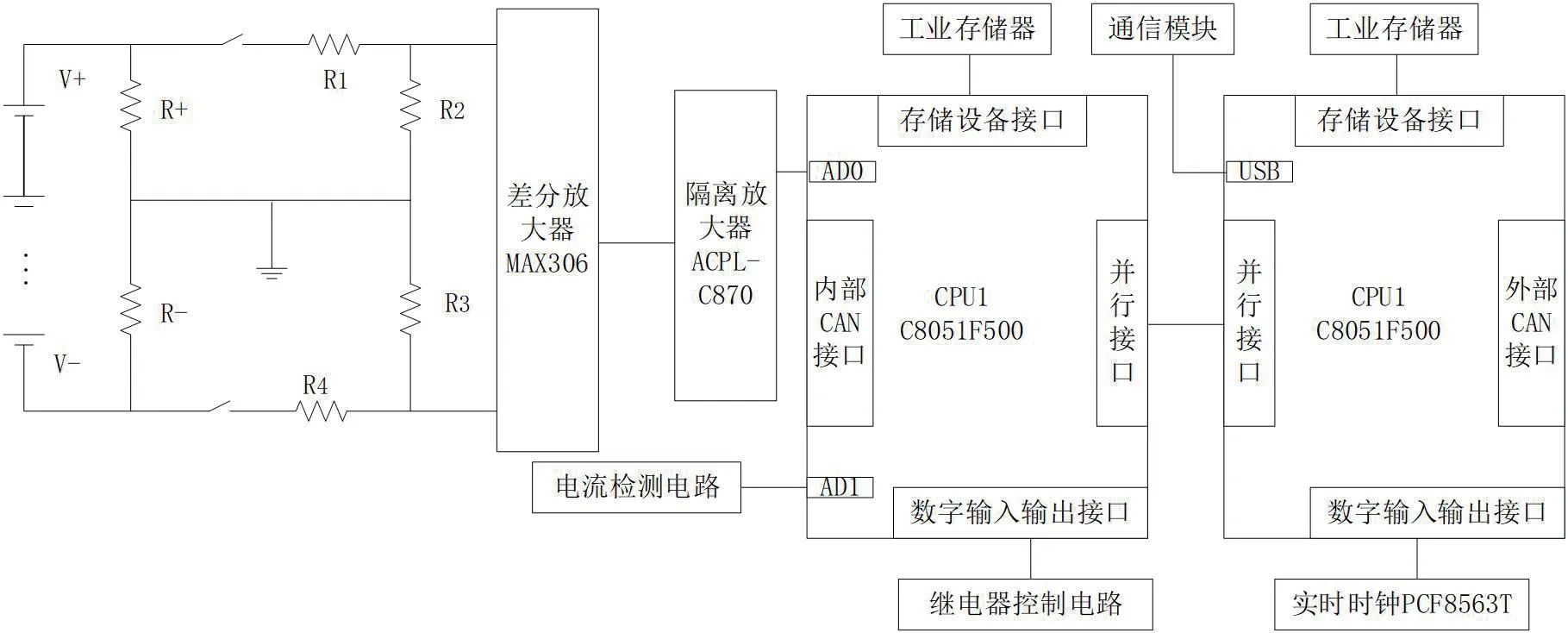
图4:主控制模块示意图
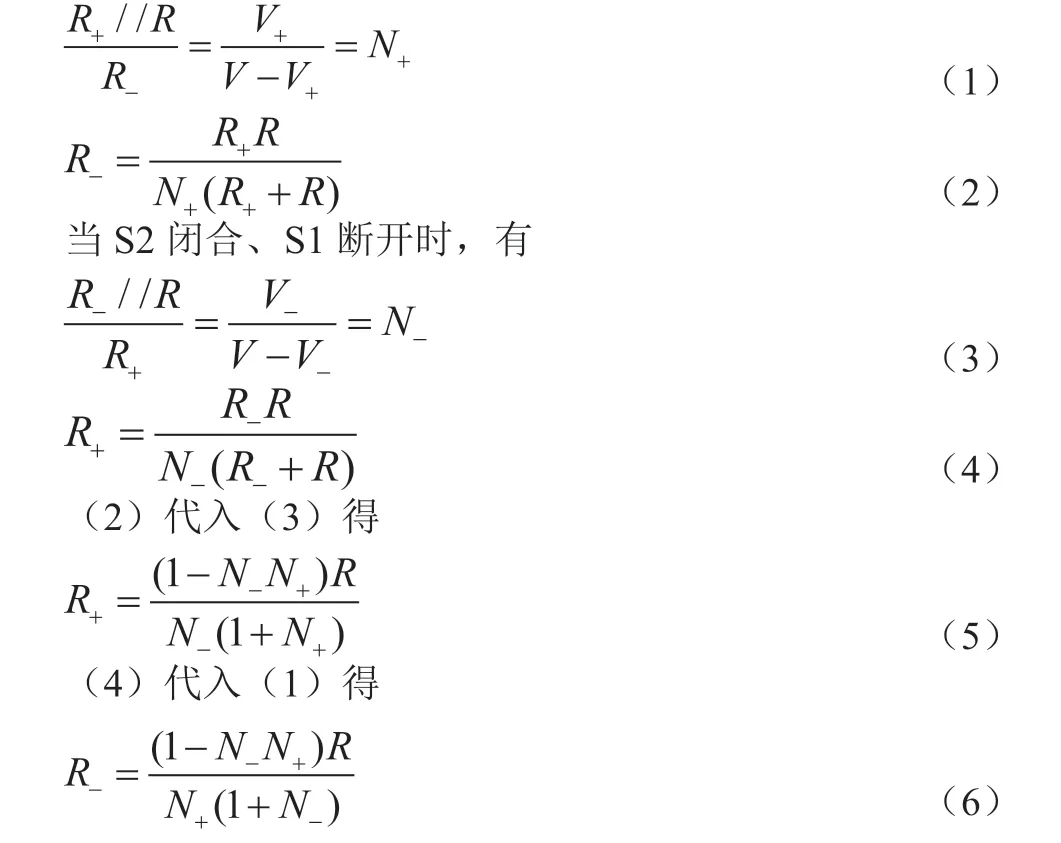
电流信号测量采用电流传感器TBC300LTB 将大电流转换为小电流信号,再经采样电阻将电流信号转变为电压信号,进行滤波、隔离放大后,送处理器的AD 输入通道进行AD转换,其测量方法已趋于成熟,这里不再详细论述。图中还给出了总电压检测方案,并在软件上对母线绝缘电阻方法进行了改进,S、S为PHOTOMOS 继电器,R等于R,R等于R,R和R的和等于R,R和R为正负母线绝缘电阻,S闭合、S断开时,测量V值,S闭合、S断开时,测量V的值,S、S都闭合时测量总电压V 的值,进而计算正负母线绝缘电阻,绝缘电阻计算推导公式如下所示:
当S1 闭合、S2 断开时,有
4 电池管理系统软件设计
利用C 语言编写系统控制程序,由于系统控制器选用C8051F500,其自带CAN、II2C、SPI 等硬件模块,因此程序只需配置各个模块的寄存器即可实现相应的功能,为进一步提高系统安全和稳定性,软件中综合采用滤波、CRC 冗余校验、看门狗和过采样技术,主控制单元和子控制单元程序流程如图5 和图6 所示,系统初始主要包括时钟信号配置,定时器工作模式配置,CAN 模块初始化等,随后由主控单元启动CAN 定时器,周期性地发送CAN 启动帧,接收由BMU 单元检测的单体电压、电池包温度信息,对这些数据进行数字处理,实时计算SOC 值,并将处理结果发送到远程监控平台进行实时显示,当收到监控平台控制命令时,便通过内部CAN 总线将控制命令传送到BMU 和BBU单元进行相应的控制,例如,充放电模式的切换,均衡启动和关闭,温度超过一定范围时风扇的开启控制等。

图5:主控制单元程序流程图

图6:BMU 单元程序流程图
5 试验仿真验证
5.1 均衡电路仿真验证
图7 为基于Buck-Boost 均衡仿真电路图,由于两路驱动电路同时工作,两MOS 管栅极驱动电位相同,而Q1 为P 沟道MOS 管,Q2 为N 沟道MOS 管,因而同一时刻只有一个导通。当MOS 管栅极电位为0 时(这里规定地GND处为参考电位),Q1 栅源电压约为-6 V,足以充分导通,Q2 栅源电压为0 V 而截止,电源V1 给电感充电,当MOS管栅极电位为6 V 时,Q1 截止,Q2 栅源电压达到6 V 而导通,电感向V2 放电。另外,为避免两MOS 管导通或截止瞬间出现同时导通的情况发生,在驱动信号进入MOS 管前,增加了两并联的二极管和电阻,如图中D3 和R3 以及D6 和R6 所示,二极管的作用是加快MOS 管的截止,而电阻的作用是减缓MOS 管的导通,这样可以保证一个MOS 管截止前,另一个不会导通,避免了同时导通产生的大电流。
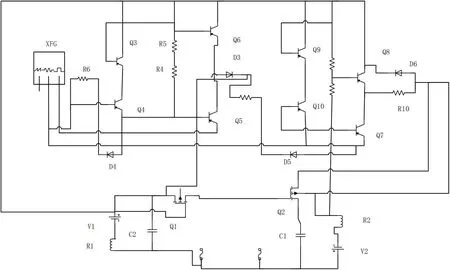
图7:基于Buck-Boost 结构均衡仿真电路
本次仿真的PWM 信号频率设为100 KHz,MOS 管驱动电压可达±6 V,足以使MOS 管完全导通,均衡能量转移方向是双向的,这里以电源V1 向V2 转移能量为例进行仿真,将电感值设为0.1 mH,以保证电感电流连续的同时,也减小电流纹波大小,将脉冲信号占空比设为0.54,实验中测得Q1 导通压降约为0.1V,Q2 导通压降约为0.2 V,电感电流仿真波形如图8 所示,对应两电源端电流波形如图9 所示。由图可见电感电流连续,平均值约为8.25 A,纹波电流约为0.15 A,电源端电流却不是连续的,这是此均衡电路的主要缺点。通过以上数据可计算出均衡能量转移效率为85.2%,电源V1 在一个周期释放的能量为133.7 uJ,V2 和MOS 管及电阻消耗的能量132.7 uJ,其中电阻R1、R2 消耗的能量占5%,MOS 消耗的能量约占9%,可见当电流较大时,器件电阻和MOS 管将消耗许多能量,因此通过降低导线电阻,选取导通电阻和电压小的MOS 管可以提高均衡效率,减小能量损耗。
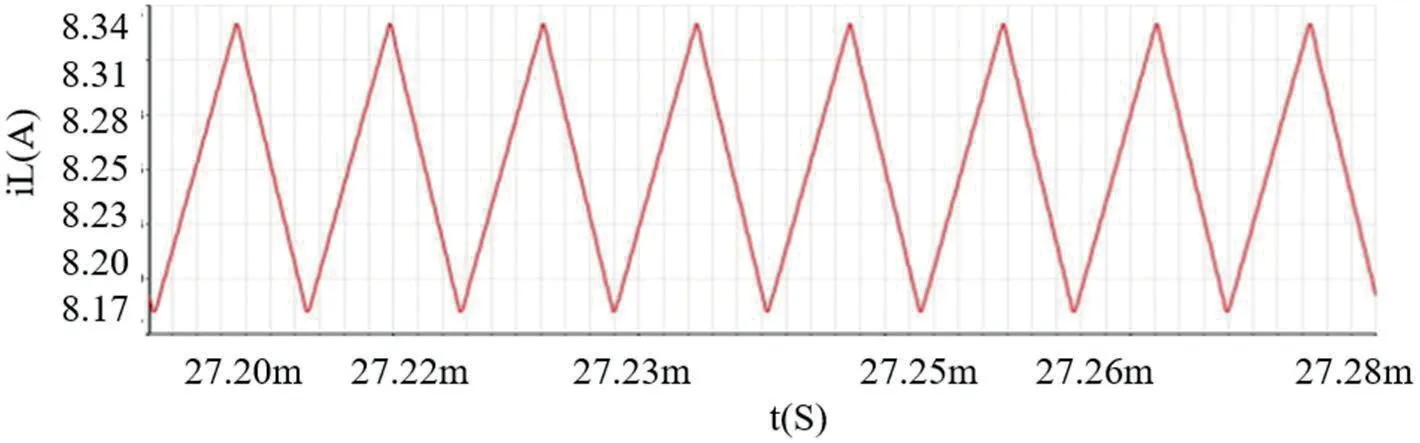
图8:电感为0.1mH 时电流波形
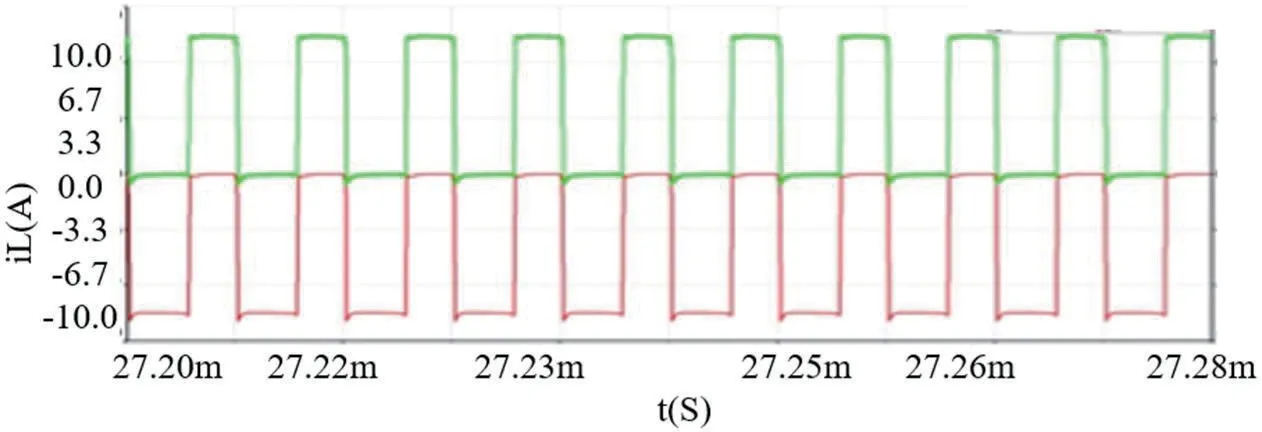
图9:电源端电流波形
5.2 SOC估算试验
考虑到电网环境状态的复杂性,储电池为其提供的功率变化较快,其工作电流变化速率也较快,而电流积分法是动态工况下电池剩余电量计算的主要方法,如果工作电流变化速率较大而相邻两次电流检测时间间隔不满足足够小的要求,这样产生的积分误差是相当大的,而且是不断积累的,由此计算的电池剩余电量偏离真实值的误差将逐渐加大,从而导致电池性能和利用率下降,虽然通过提高电流测量精度和减小积分时间步长可在一定程度上提高电流积分法计算的SOC 准度,但其较小的积分误差经过长时间的累积后,仍然会使SOC 估算值远远偏离实际值。针对SOC 估计值偏离真实值较大的情况,选择基于等效电路模型辨识的卡尔曼滤波SOC 预估方法,表1 为工况试验过程中,以30 分钟为间隔,利用改进的卡尔曼滤波算法对SOC 预估得到的测试数据,SOC 预估初始值为0.4,在不同SOC 实际值条件下进行递推估算,由测试数据可见,经过600 秒左右的循环递推计算,预估值可以较好地收敛到真实SOC,其估计误差在2.5%范围内,试验表明定期采用改进的卡尔曼滤波算法对SOC 估计值进行修正,能够将SOC 误差限制在允许范围内。

表1:SOC 预估初始值为0.4 时的测试数据
6 结论
本文首先设计电力物联网智能电池管理系统的总体分布式CAN 网络结构并介绍各个模块的功能,在总体结构的基础上设计了主控制模块、单体电池检测和均衡控制模块硬件结构,给出了主控制单元的总电压和母线绝缘电阻检测方案,软件设计中给出了主控单元和子单元的程序流程图,最后采用改进型卡尔曼滤波方法对SOC 预估,证明本系统能够很好地满足储能电池的控制需要。
