一种用于雷达弱小目标检测的检测前跟踪算法
2022-07-11吕潇君张加奇
吕潇君 张加奇
(中国电子科技集团公司第十四研究所 江苏省南京市 210039)
1 引言
检测前跟踪(TBD,track-before-detect)算法是在低信噪比条件下对弱小目标进行检测和跟踪的一种技术。由于目标的信噪比较低,用传统的恒虚警检测无法在单帧数据中检测到目标。而TBD 技术在单帧内并不给出检测结果,而是将单帧信息存储起来,在一段时间内对多帧数据进行存储和处理,最后才同时宣布检测结果与目标的航迹。TBD 的实质是通过对目标信号进行多帧非相干积累,凸显目标信息的同时抑制杂波干扰。近年来提出的TBD 的主要方法有动态规划方法、粒子滤波算法、Hough 变换法、最大似然法,等等。
综合考虑各种算法自身的特点与实用性,本文主要研究的是动态规划算法和Hough 变换法。动态规划算法是穷尽搜索法的一种等效实现算法,但是它的计算效率远远高于穷尽搜索。它的主要思想是将K 维优化问题转化为K 个1 维优化问题,对优化问题的分级处理大大降低了它的计算量。使用动态规划算法时,需要预先知道目标的大概速度范围信息,但在实际雷达应用中,这是不容易获取的。为此,本文采用Hough 变换法来完成对目标的航迹起始,并提取取目标的先验速度信息,然后再应用动态规划算法来进行数据的多帧积累,形成多帧航迹。文中结合实测数据验证了这种方法的有效性。
2 雷达目标的运动模型
考虑在距离-方位(X-Y)平面内运动的目标,为了方便描述,采用具有固定采样周期T(帧与帧之间的时间间隔)的离散时间模型,在时间k,目标状态为X:

m,n 取值不同代表不同的运动状态,过程噪声的各个分量为零均值高斯随机变量,各分量之间的协方差矩阵Q为:


3 基于恒虚警处理的DBT算法
先检测后跟踪(DBT, detect-before-track)算法是利用恒虚警(CFAR)检测技术,对原始回波做过门限检测,在单帧内给出检测结果,提取点迹。利用帧间的点迹信息实现航迹起始与目标跟踪。
CFAR 处理的目的是提供相对来说可以避免噪声背景杂波和干扰影响的检测阈值,使目标检测时具有恒定的虚警概率,保证数据处理能正常工作。
CFAR 的处理方式包括单元平均处理(快门限)及噪声统计门限处理(慢门限)。快门限CFAR 主要作用于杂波区,用于抑制剩余杂波的影响,工程上常采用单元平均选大的方法实现,即以检测点附近单元为参考单元,左右参考单元平均值选大为门限阀值,图1 为单元平均CFAR 处理框图。
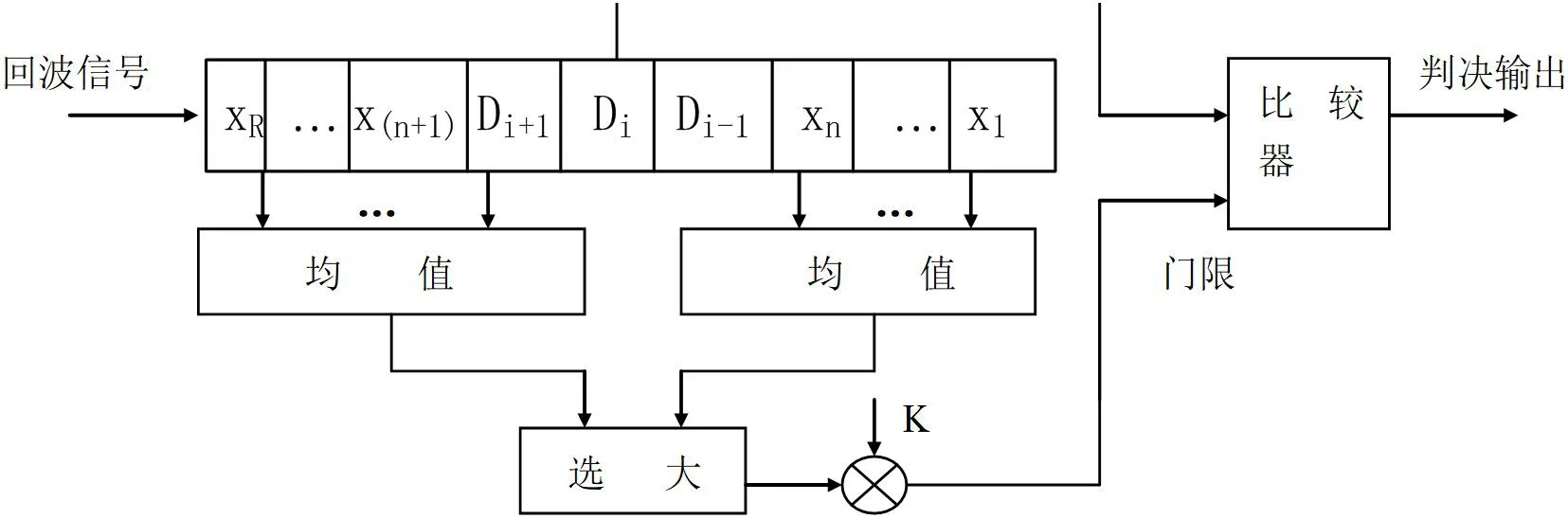
图1: 单元平均CFAR 框图
而在无杂波区,采用慢门限,即噪声恒虚警,慢门限CFAR 处理是在雷达休止区对噪声样本进行取样,通过大样本统计方法估计噪声均值,对均值按高斯噪声的标准偏差归一化后得到门限阀值,该阀值作为判决门限,检测的准则是当被检单元的幅度值大于该阀值时,判为“有目标”,否则判为“无目标”。
单元平均选大恒虚警处理(GO-CFAR)计算公式如下:

由图2 所示,当虚警概率为10-3 时,检测概率随SNR变化关系如图2,当SNR 为9.3dB 时,检测概率约为50%,传统的恒虚警算法对低信噪比的目标检测概率锐减,DBT算法容易丢失微弱目标航迹,而随着现代目标隐身技术的广泛应用和发展,CFAR 检测技术会在目标低RCS 的条件下检测和跟踪性能急速下降,探测距离和预警时间大大减少。如图3 所示。
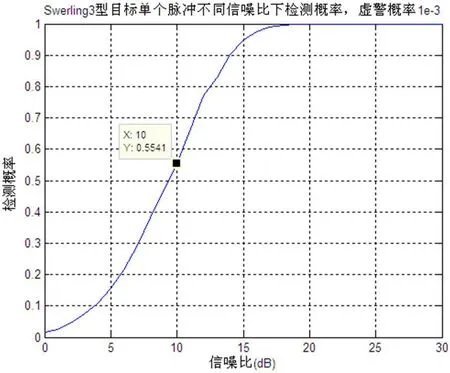
图2: Swerling-3 型目标检测概率随SNR 变化曲线

图3: DBT 算法流程框图
4 基于动态规划的TBD算法
动态规划算法(DPA)是对所有可能的航迹(x,x,…x)进行某种方式的搜索,从而找到一组使值函数I 达到最大的状态序列(x,x,…x)并判决为目标轨迹。值函数I 能够反映目标和杂波在幅度与运动特性上的差异,具有预期目标特征的状态可以获得较高的值函数I,相反具有杂波、干扰特征的状态获得较低的值函数I。所以通过动态规划方法对值函数I 进行积累,可以有效的凸出微弱目标,实现目标检测性能的改善。
为了对比传统检测算法与动态规划算法航迹恢复性能,本文做了如表1 内容条件仿真。

表1: 航迹恢复性能仿真条件
仿真结果如图4 所示,图中精确航迹检测概率(PdT)是指通过DPA 积累和航迹的恢复之后,恢复出的目标航迹满足每一帧的目标位置(x,y)与真实的目标位置精确一致。

图4: DPA 与传统跟踪算法恢复航迹性能对比(PdTexact)
由仿真结果可知:
(1)在航迹恢复概率为0.5 时,DPA 的航迹恢复性能优于传统检测算法的性能2dB 左右;
(2)在航迹恢复概率为0.9 时,DPA 的航迹恢复性能优于传统检测算法的性能2dB 以上。
动态规划算法对目标的多帧积累性能较好,计算量不是太大,能处理具有一定机动能力的情况。但是应用动态规划算法时需要预先知道目标的大概速度信息,然后在这个速度的基础上使具有预期目标速度特征的状态可以获得较高的值函数,从而有效的提高微弱目标的信噪比,实现目标检测性能的改善。
5 基于Hough变换的TBD算法
Hough 变换算法是把解析曲线从数据空间映射到以参数为坐标的参数空间中,根据参数空间的一些标识反过来确定曲线的参数值,进而得出数据空间中各种解析曲线的确定性描述。
在实际应用中,直线方程的斜率—截距式y-mx-c=0 不能表示形如x=a 这种直线,因为这时直线的斜率为无穷大。为了解决垂直直线的斜率为无穷大这一问题,将极坐标引入霍夫变换,采用变换函数:

称为标准霍夫变换 (SHT)。
上式也可以表示成如下形式:

其中ρ 为原点到直线的法线距离:θ 为该法线与X 轴正向所成夹角。这样,图像空间中的任意一点(x,y)将对应参数空间中的一条正弦曲线;图像空间中位于同一条直线上的点确定了参数空间的多条正弦曲线,且这些正弦曲线交于同一点,此交点的坐标确定了原图像空间中直线的参数。对图像空间中所有点都进行霍夫变换后,再对参数空间进行峰值提取,就得到了直线的参数。
图5 和图6 演示了标准霍夫变换的基本原理与过程。其中,图5 为图像空间,图6 为参数空间。
图5: 标准霍夫变换的图像空间

图6: 标准霍夫变换的参数空间
Hough 变换算法能够很好解决直线运动目标的问题,适用于单目标和多目标情况下的航迹起始。但是由于算法针对直线运动的限制,霍夫变换算法对具有一定机动能力的目标检测跟踪效果较差。
6 Hough变换航迹起始与动态规划多帧积累相结合的TBD算法
综合第4 节和第5 节两种方法的特点,本文提出了一种“Hough 变换航迹起始+动态规划多帧积累”的检测前跟踪算法,该算法的流程如图7 所示,步骤如下:
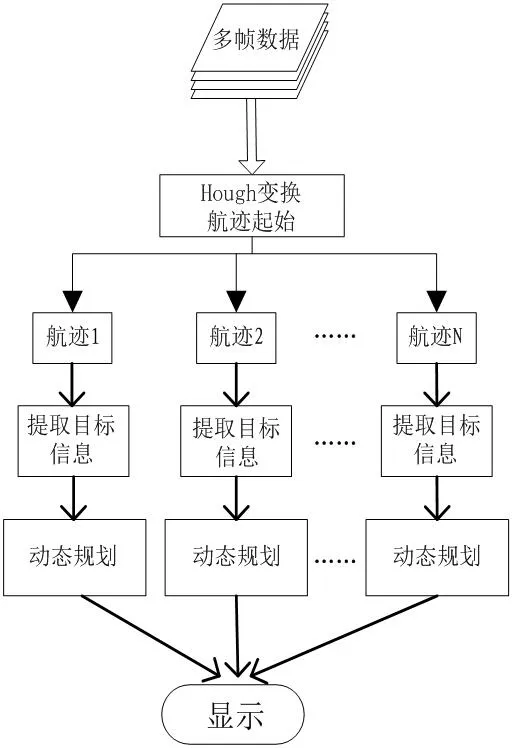
图7: TBD 算法流程框图
第1 步:将多帧数据送入航迹起始部分。送入航迹起始部分的多帧数据范围为3 到6 帧。
第2 步:利用Hough 变换对送入的数据进行航迹起始,产生出N 条(N 为可能的目标个数)初始航迹。
第3 步: 提取每条航迹的目标信息,如目标的运动状态(飞行方向,速度大小)等。
第4 步: 根据提取的每个目标的航迹信息设置相应通道的动态规划参数,对每个目标分别进行动态规划处理。
第5 步:利用动态规划处理之后的结果恢复目标航迹,对航迹进行凝聚等处理后送入显示设备输出。
该算法处理的数据可以是原始数据,也可以是已经做过低门限检测预处理后的数据。使用原始数据可以最大限度的保留目标信息,提高发现概率,但相应的会带来计算量的增加;而使用较低的门限预先对原始数据进行处理,则可以大大减少运算量,同时对发现概率影响也不大。综合考虑以上两种方法的特点,本文使用的是后一种方法。
算法第4 步采用的是多个通道单独处理,即对第3 步得到的每一个目标信息分别进行处理。符合运动状态的航迹,其值函数可以得到积累;不符合运动状态的航迹,其值函数无法得到积累,从而被舍弃。在积累的最后,通过值函数的大小是否通过第二门限来判定航迹是否需要保留,对通过第二门限的值函数,恢复其航迹信息,这些航迹信息就是动态规划处理的结果。
根据第4 步的处理结果可以恢复出目标的可能航迹,其中有些位置接近的航迹可能是同一个目标,对这些航迹可进行凝聚处理;有些航迹可能是由于其中某一帧的值函数非常大才得以通过第二门限,这条航迹在各帧之间起伏太大,可能是由于干扰或杂波造成的,因此需要剔除。经过上述处理后即得到最终的目标航迹跟踪结果。
由于该算法的步骤考虑了多个目标信息,对每条起始航迹分别进行动态规划处理,故可以适用于多目标跟踪的情形。
7 实验结果
本节采用某雷达实测回波数据对上节提出的方法进行了验证,并与传统恒虚警检测的效果进行对比。录取的数据是对应一个渐渐远离雷达威力范围的目标,由于雷达作用距离限制,目标的信噪比已经很低,在显控台上目标视频点已经时隐时现,无法形成完整航迹了。如图8 所示为数据在传统检测处理方式下得到的检测结果。

图8: 传统检测处理效果图
由图8 可见,采用传统检测方法,在目标飞远的过程中,目标的发现概率下降明显,已无法形成连续航迹。为提高发现概率,采用第6 节提出的TBD 方法处理数据。首先利用5 帧数据进行Hough 变换航迹起始,得到如下效果:
从图9 中可以看出,Hough 变换成功对目标航迹进行了起始,根据起始航迹可以提取到目标的运动状态信息,将此先验信息应用于动态规划算法,最后得到目标的航迹如图10 所示。
图9: Hough 变换航迹起始效果图

图10: TBD 处理航迹效果图
从图10 可以看出,采用第6 节中提出的TBD 方法处理实测数据的结果航迹清晰且较连续,处理效果显著优于传统恒虚警检测方法的处理结果。
8 结束语
本文结合了Hough 变换和动态规划算法的特点,提出了一种Hough 变换航迹起始与动态规划多帧积累相结合的TBD 算法,并结合某雷达实际录取数据验证了该算法在处理低信噪比弱小目标检测问题时的有效性。通过对比可知,该算法相比传统的恒虚警检测方法能够明显提高目标的发现概率,且能够形成清晰连续的航迹。
