基于FAHP 的无人直升机试飞安全评估
2022-07-11洪鹏生
洪鹏生
(中国直升机设计研究所 江西省景德镇市 333001)
在生产实践、科学实验中,人们经常会遇到这种模糊现象,即事物具有的两面性的分界线往往不够明显,如大和小、轻和重、快和慢等都包含着一定的模糊概念,本文需要讨论的无人直升机试验试飞安全也属于其中的一种。随着科学技术的发展,各学科领域对于这些模糊概念有关的实际问题往往都需要给出定量的分析,这就需要利用模糊数学这一工具来解决。
安全风险评估是指在风险事件发生之前或之后,该事件给人们的生活、生命、财产等各个方面造成的影响和损失的可能性进行量化评估的工作。风险评估就是量化测评某一事件或事物带来的影响或损失的可能程度。在众多风险评估方法中,层次分析法以其定量和定性相结合地处理各种评价指标的特点,以及系统、灵活、简介的优点,受到大家的青睐。其特点是将人的主观判断过程数学化、思维化,以便使决策依据易于被人接受,因此,更能适合复杂的社会科学领域的情况。由于层次分析法在理论上具有完备性,在结构上具有严谨性,在解决问题上具有简洁性,尤其在解决非结构化决策问题上具有明显的优势。层次分析法最大的问题是某一层次评价指标过多时,其思维一致性很难保证。在这种情况下,将模糊法与层次分析法两者优点结合起来形成的模糊层次分析法,将能很好的解决这一问题。
无人直升机除了可以替代有人直升机完成探潜、侦察警戒、通信中继、电子对抗、目标指示、物质输送以及火力支援等任务外,还可通过有人无人协同工作模式完成任务。无人直升机以其能垂直起降、无人员伤亡和生理使用限制等优点成为了直升机重要的发展趋势之一。无人直升机试验试飞是验证无人机设计指标、检验质量和改进提升性能的重要手段。无人直升机试飞作为研制过程中的漫长而关键的一环,是一项具有高度综合性、高复杂性和高风险性质;贯穿于飞行研究、新机设计、生产、研制和使用的全过程;验证各系统功能和性能,探索无人直升机性能边界的系统性工程。其按照性质和任务可分为研究性试飞、调整试飞、定型试飞、使用试飞和验收试飞。如何对无人直升机各类试飞过程中可能产生风险的来源进行条目化归类和分析,并计算出这些风险源对试飞安全的影响权重值,进而进行安全评估。根据评价矩阵逆向得出影响试飞安全指标的薄弱项,结合影响权重,通过制度和技术上的手段合理的加强需要提升要求的指标项,从而提高无人直升机试飞的安全性。
1 无人直升机试飞安全评估指标体系的建立及依据
1.1 指标体系的建立
无人直升机试飞安全评估是一个多指标模糊综合评价的问题,建立的指标体系既要客观全面的反映出对试飞安全的影响,各指标之间还应该具备独立性和层次性。结合以上原则,本文按照层析分析法(AHP)建立如图1 所示指标体系,并按顺序对各指标进行编号。

图1: 安全评估指标体系
1.1.1 无人直升机
如图2 所示,与无人直升机有关的主要有系统及性能和地面控制站。在复杂多变的试飞环境中,为了提高无人直升机的安全性,无人直升机在三大系统(旋翼、传动、发动机)稳定性方面和机体结构的刚强度方面要做相应的提升和加强。且具有一定的发动机可用过载功率以应对例如风切变等可能出现的特殊气象环境。飞行控制系统是无人直升机的核心子系统,在进入自主飞行状态时,飞行控制系统会全权限控制飞机按照计划的航线执行飞行任务,即使出现数据链中断情况,无人直升机也会按照返航航线安全返回。因飞控系统的重要性,在设计飞控系统都会设计相应逻辑保护和冗余设计,这些都是对试飞安全的重要保障。地面控制站作为与无人直升机交互的渠道,具有对飞行平台和任务载荷进行监控和操纵的能力。在实际试飞任务实施中,地面控制站作为整个无人直升机系统的指挥和控制系统中心,飞行控制员控制无人机产生的控制指令和数据,通过数据链发送给无人机的飞控计算机,从而完成飞行控制。此外地面控制站通过数据链接收无人机平台状态信息,进行解析和显示。地面控制站的硬件故障、软件运行和供电系统稳定性等因素直接影响地面站的工作状态,因无人直升机控制和任务系统复杂,人机交互界面友好方便无人机控制员更好的控制无人机。
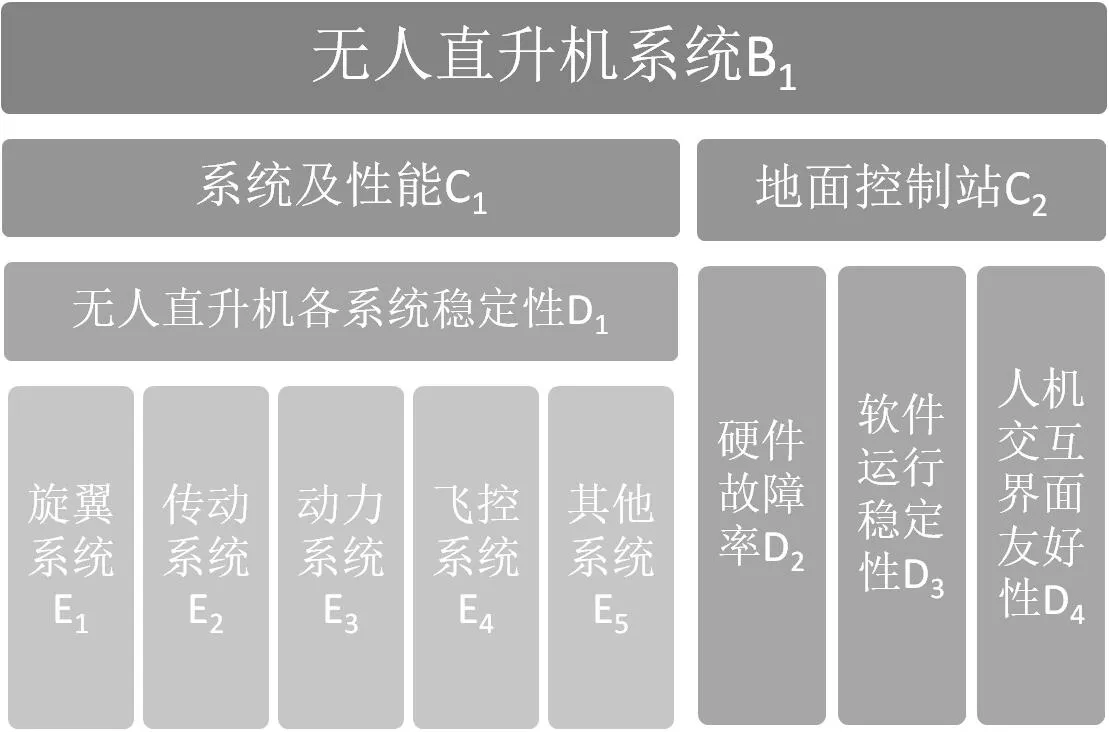
图2: 无人直升机系统指标
1.1.2 数据链
如图3 所示,与数据链有关的因素包括测控链路稳定性、卫通链路稳定性和试验试飞场地电磁环境。无人直升机数据链路提供了无人直升机与地面控制站之间的通信链路,是无人直升机系统的重要组成部分,无人直升机控制员在地面或其它装载平台通过数据链对飞行器进行操控,同事也通过数据链操纵飞行平台所携带的各类任务载荷。数据链路和卫通链路的稳定性关系着能否对飞机进行实时监控。在外场复杂的试验环境中,在首次飞行前需验证起飞、降落场地和飞行空域范围内的电磁环境,明确对无人直升机系统的影响程度,如果存在影响数据链的强大电磁辐射干扰源应该重新修改航线避开干扰区,确认无法避开应该重新选择试飞场地和空域。

图3: 数据链指标
1.1.3 试飞相关人员
如图4 所示,与试飞相关人员有关的因素包括人员身心健康与工作强度、试飞相关人员技术水平和应急处理能力和对试飞安全管理体系执行情况。在试飞任务实施前,要对人员身心健康进行确认,确保人员精力充沛的进入工作岗位。据统计,研究人员分析造成无人机失控和坠毁的事故原因,发现造成事故出现的影响因素中,设计、技术和规则等虽然在影响因素之列,但由于无人机操作人员的操作失误和训练不足导致的“人为因素”占比高达75%。因此做好无人机试飞人员的培训工作,使之掌握无人机的试飞技术和操作技能,是影响无人机系统能否安全完成试飞任务的关键。试飞相关人员除了遵守试飞安全管理体系,按规定的作业文件和程序文件实施试飞任务外,还要对不同试飞任务的无人直升机系统、空域内气象和地面站系统的变化有着深入的了解,并做出相对应的应急预案以应对随时出现的应急情况。
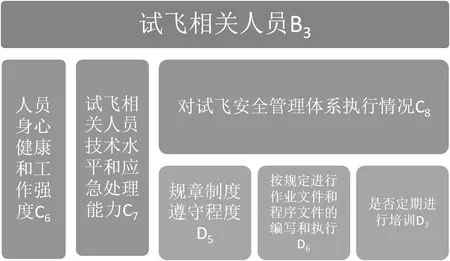
图4: 试飞相关人员指标
1.1.4 气象环境
如图5 所示,与气象环境有关的因素包括起飞、降落场地的气象信息(地面大气温湿度、地面风速和风向、降水情况等)和飞行空域的气象信息(空中风速和风向、云层情况和降水情况等)。温湿度对发动机输出功率有着一定的影响,在低温测试环境中还是判断飞行高度结冰条件的重要因素,高温环境测试中直接影响无人直升机的最大起飞重量。

图5: 气象环境指标
2 基于模糊层次分析法的安全评估
模糊层次分析法是一种层次分析法和模糊综合评价相结合的评故方法。首先对分析对象进行逐层分解,同等级的元素相对于上一级元素的影响通过依据比例标度表进行比对评分,从而形成同层次元素的模糊判断矩阵,进而得到各子元素相对于母元素的权重。然后依据一定的准则对各评价指标进行量化评定确定评价集V,得出相对应的评价矩阵R。将评价矩阵和权重结合进行综合运算,得出准则层和指标层的模糊矩阵Y,最后根据模糊综合评价隶属度最大准则得出对目标的评价结果。本次安全评估以无人直升机某试验科目为例。出于篇幅原因,只对A、B、C 三个等级的层次结构之间的元素建立模糊判断矩阵进行分析评估。
2.1 基于FAHP的评价指标权重确定
依据判断矩阵标度表(表1),影响因素层级之间进行比较,得到如表2 和表3 所示的模糊判断矩阵。

表1: 比例标度表

表2: B 层级评估指标的模糊判断矩阵和权重值
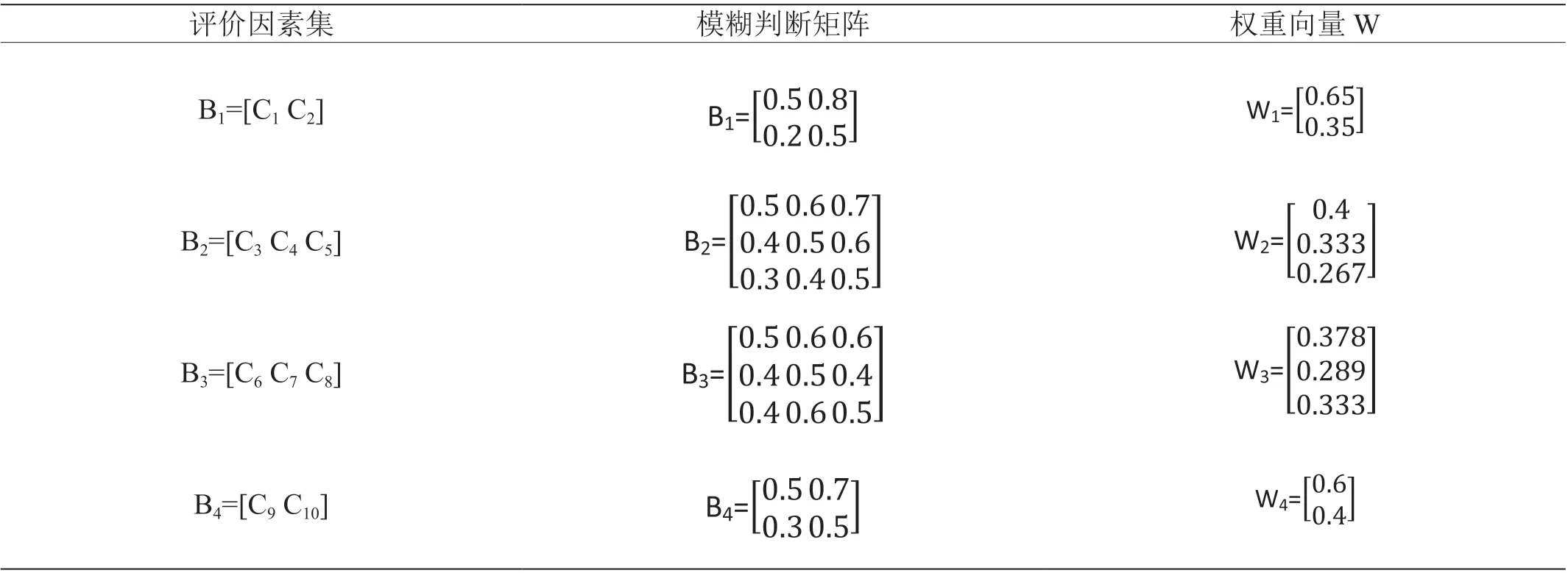
表3: C 层级评估指标的模糊判断矩阵和权重值
综上,可综合得到影响试飞安全各指标层权重值,最终可得出各指标的综合权重如表4 所示。
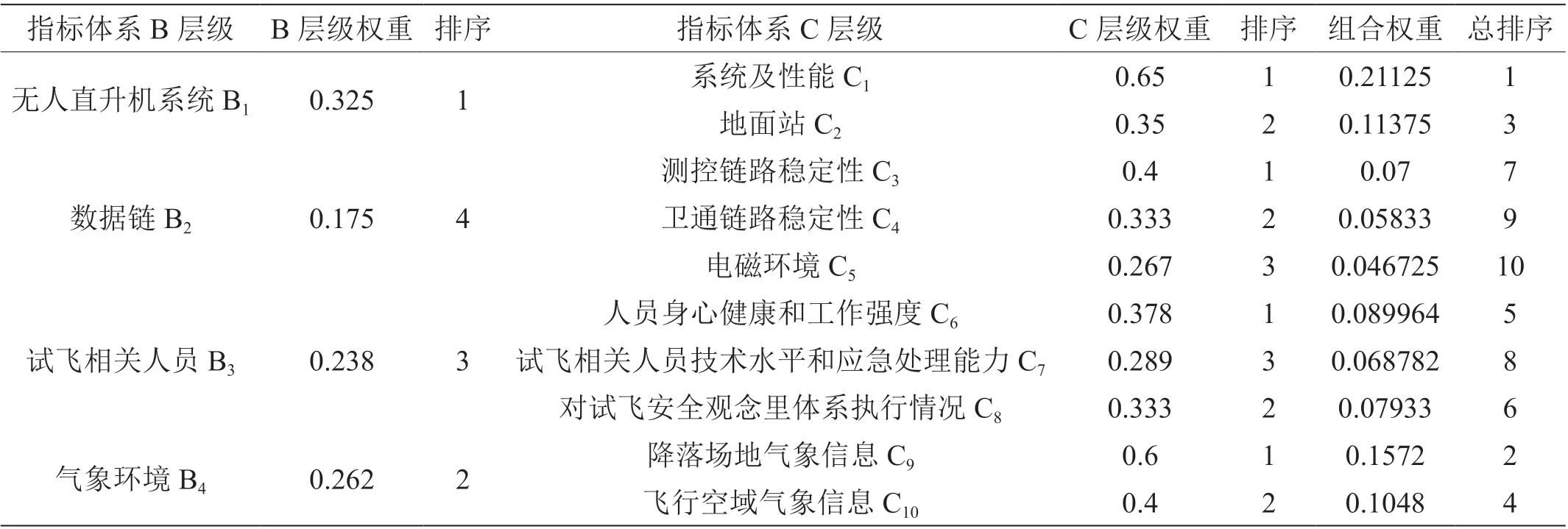
表4: 指标体系权重结果
通过模糊判断矩阵可知B 层级中对试飞安全A 影响的权重由大到小依次为B、B、B、B。再根据C 层级相对于B 层级的权重值,得出C 层级相对于试飞安全A 的权重值由大到小依次为C、C、C、C、C、C、C、C、C、C。根据各指标权重的总排序,可适当加大对权重占比较大指标的安全控制措施。
2.2 确立评价集V
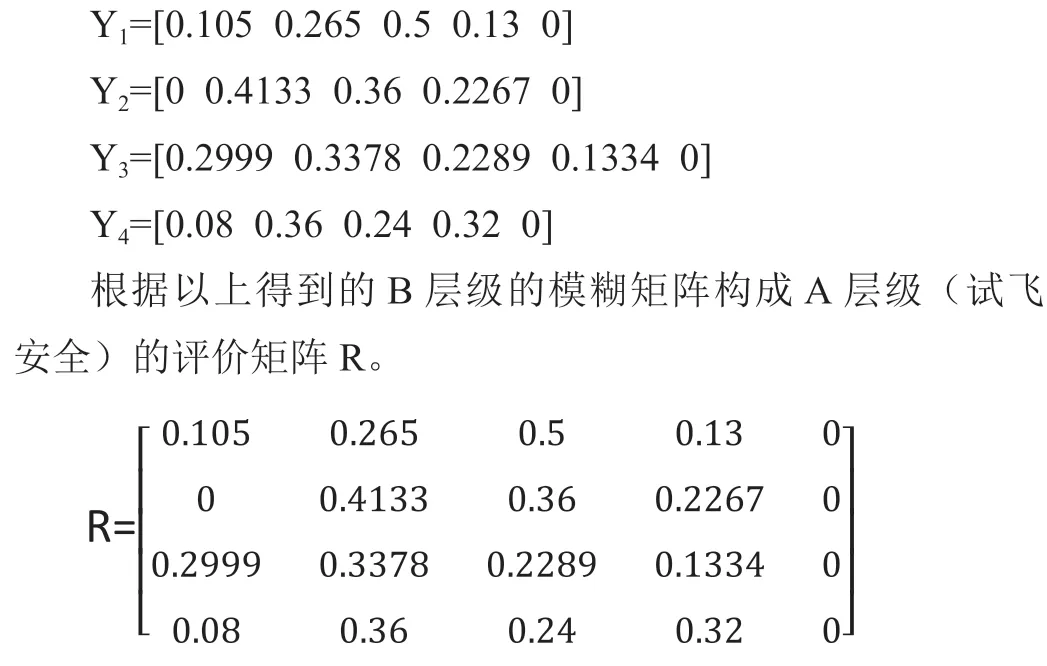
将评价指标体系指标结果划分为“安全、较安全、临界、危险、非常危险”5 个等级,构成一个评语的有限集合V=[v,v,v,v,v],通过向各方面专家和相关管理人员的咨询得出了此次无人直升机试飞科目的评价矩阵R、R、R、R如下:

2.3 模糊层次综合运算
根据Y=W*R,分别计算B、B、B、B的模糊矩阵Y、Y、Y、Y。
再根据公式Y=W*R,得出试飞安全的模糊矩阵Y:
Y=[0.1264612 0.3331689 0.3428582 0.1975117 0]
根据隶属度接近原则,可知此次科目的无人直升机试飞安全综合评估处于较安全和临界状态之间。
2.4 结果分析
根据专家和相关管理人员给出的评价矩阵并结合指标权重可知,影响该科目试飞安全的指标为:地面站、测控链路稳定性、卫通链路稳定性、电磁环境和降落场地信息,可见在试飞场地电磁干扰环境复杂,实施试飞的过程中如果发生因电磁环境干扰,而中断测控链路和卫通链路,无人直升机自动启动应急返航预案,但在自动返航的过程中如果没有对降落场地气象信息进行实时监控,此时如果场地气象突变将会加大试飞安全风险。综上所述,对提升无人直升机试飞安全提出如下建议:
(1)加强对电磁环境的监控力度,在飞行前通过提升雷达功率等措施,不断寻找合适频点以提升无人直升机系统的测控链路稳定性和卫通链路稳定性。
(2)如确实发生数据链中断故障,因数据链中断而返航的无人直升机在自动降落过程中没有人工辅助情况下如遇突发气象条件易发生安全事故,加强对降落场地气象信息的监控能力,并尝试数据链的重连。
3 结语
利用模糊层次分析法对试飞安全进行评估能够全面的考量到影响试飞安全的各个指标,与传统的安全评估方法相比较,更加的直观、准确。通过对得出的指标评价矩阵和权重进行分析,可以发现对试飞安全危害性权重大的指标,针对性的制定相应对策,从而提高试飞的安全水平。
