工业移动机器人多机调度系统性能指标定义及性能优化
2022-07-11张慧
张慧
(南京中兴新软件有限责任公司 江苏省南京市 210012)
1 前言
AGV/AMR 是广泛应用于仓储和生产线进行智能搬运的移动机器人,是物流自动化升级的利器。通常,在一个项目中会存在多个AGV/AMR 同时运行,由调度系统进行协同调度管控。小型的多机协同项目,对调度系统的要求不是很高。但在大型多机协同项目中,尤其要求同时调度超过100台,甚至1000 台时,调度系统的性能就会成为一个瓶颈。由于不同的工作场景、任务类型差异很大,业界并没有一个标准来定义调度系统性能指标。所以,本文分析调度系统性能影响因素、试图建立一种标准的参考业务模型,在此模型下进行性能指标的计算和定义,并提出性能优化的方法进行验证。
因为自然导航方式的移动机器人AMR,较自动导引车AGV 的功能更加复杂,所以,下文以激光SLAM 导航的AMR 为例进行分析。
2 调度系统性能影响因素
2.1 移动机器人与调度系统的控制架构
在实际应用场景中,会存在多台移动机器人同时运行。但上位机MES 或WMS 等系统发布作业任务时,需要由调度系统来完成多台机器人之间的协同,进行任务分配、路径规划以及交通冲突的预防和解决。如图1 所示,移动机器人和调度系统之间有集中式和分布式两种控制架构。集中式那就是有一个统一的调度系统来完成调度工作,分布式调度是一种更自主式更灵活的调度方式。当前集中式的调度系统占绝大多数,分布式调度对算法、计算资源、通信都有较高的要求,目前还不成熟。所以,本文以集中式调度系统为研究内容。

图1: 机器人与调度系统之间的控制架构
2.2 调度系统的组成及性能影响分析
调度系统包括一些地图管理、车辆/站点配置、任务查看、统计分析等非实时业务功能,但是影响性能指标的主要是实时性要求高和多并发的调度任务。
一次调度任务主要包括如图2 几个部分:

图2: 调度任务流程
(1)任务分配:收到MES 等外部调度任务时,需要按照任务分配策略进行分配。分配策略可以有很多种,目前比较常用的策略是,先要寻找空闲的AMR,如果有多个,需要在其中计算出一个离目的地最近的AMR;如果没有空闲的AMR,进入任务等待列表,并不断扫描未执行任务列表。这个过程,如果空闲的很少,有空闲的就被分配了任务,那没有太多耗CPU 资源的操作。如果空闲的较多,则与下述路径规划中最短路径的计算相关。
(2)路径规划:这个过程对CPU 资源消耗较大。AMR通过激光SLAM 形成地图,并在地图中已规划好的可行驶线路图,包括节点和线段,并指定了线路的方向。对于任务起始A、B 点之间有多条路径,系统需要比较每条路径的最优化选择。如果AB 两点之间越长,线路节点(交叉点,以及长线段中的中间节点)越多,计算就会越复杂。最极端情况,与2(n 为节点个数)成正比。
(3)交通管制:AMR 运行过程中,每隔一个时间间隔(各厂家有不同,几十到几百毫秒)上报给调度系统当前位置和行驶方向。调度系统后计算这辆车和其他AMR 的距离,判断是否有碰撞风险。最极端情况,需要N*C(N,2)次计算(N为AMR 的台数)。
综上,影响调度任务性能的客观因素是任务频次、地图规划线路的交叉点及节点数以及AMR 个数,主观因素就是算法本身的合理性。
3 调度系统性能指标定义
3.1 模型的考虑
从上述分析可以看出,每个项目中的地理空间大小、路径多少、任务的频次、AMR 个数的不同,调度系统呈现出来的性能表现将会不同。但我们仍然需要有一个客观的指标来表征调度系统的性能,所以,我们需要在一个标准的“业务模型”下测试并表征出我们调度系统的性能。
“业务模型”的抽取尽可能是影响因素相互正交。我们可以看出:
Performance ∝ Efficiency CPU ∝ F& N& Duration& N
性能Performance 越高,CPU 效率越高,完成任务数F、通过的节点数N、能执行任务时长Duration 越多。因为路径的节点数N、单任务执行时长Duration,客户是不可能在实施前告知,但客户是能告知业务执行的节拍,即调度任务的频次F和工作区域的面积Area 的。
∵ N、N∝ Area
∵ Duration ∝ Area
∴ 当F、Area 确定时,Performance ∝ N,即调度系统的性能可以用同时支持的AMR 数来表征。
3.2 标准模型的设定
Area 的模型,我们可以参照一些项目,折算N800个货架/10000m,则折算系统的节点数N按1000 计算。(单位面积中货架数可以根据部署的合理性进行调整)
F,正常情况下应是客户给定。但在上述10000m的假设条件下,我们可以估算一个调度任务的节拍。
10000m空间,长100m*宽100m,
考虑到站点位之间距离最长390m,最短10m,接任务先从停车场或充电区或途中到任务起始点。则推算单任务平均运行距离S=(390+10)/2+40=240m;
平均速度是1.2m/s,加上对接货架2 次,每次20s,另外需要考虑充电时间影响的效率因素。充电2 小时,跑6 小时,效率为0.75。则单任务时间
Duration= (240/1.2+2*20s)/ 0.75 =240s/ 0.75 =320s
按前期讨论10000 平米,合理AMR 数不超过50 台。则
Ftask = 3600s/(320s/50)=562.5 次/h ≈560 次/h
综上,我们可以按10000 平米,800 个货架,每小时560 次调度任务为一个标准模型。
3.3 性能指标
在这个标准“业务模型”下,我们的性能指标就可以AMR 个数来表征。我们需要测试出单个业务单AMR 的CPU 占用。对应到相应的F、N、Duration 下每AMR的CPU、CPU、CPU。计算出系统能支持的最大AMR 数,这就是对应到标准业务模型下的性能指标。这个不同实现方式的不同厂家可以在同一基线上进行比较了。
对于具体的项目而言,也可以更快地计算出调度系统的硬件资源的需求和进行合理规划。比如,可以根据和标准模型之间的折算,计算出合理配置的AMR 个数。若超过系统的性能极限,就需要想办法划分区域、分多个调度系统等的规划。

4 性能优化分析
4.1 路径规划
以最常用A*算法为例。A*算法是在加权图的最小路径计算中最常用的经典图搜索算法之一。该算法采用加权图的形式,包括节点和节点之间的线段,包含节点间线段的开销、权重。该算法从初始起始节点开始,逐级访问评估下一个相邻节点来完成整个路径规划。
可以考虑的在基础算法上进行的优化:
4.1.1 静态路径表
(1)固定站点之间的路径,可以通过事先配置形成路径表,程序启动时,读到内存中,供每次路径规划直接查询使用;
(2)非固定路径,如AMR 在完成任务后回停车场途中接受到任务,可以分区设定虚拟固定站点,分段计算和查询路径表。
4.1.2 全局规划与局部规划结合
以一个实际工业应用中的地图为例,如图3。

图3: 地图示例
(1)主干道、干线交通由调度系统集中规划;
(2)由AMR 自主路径规划支路上的路由。尤其在仓储库位、停车场区域,节点密集,交叉点多,易发生交通冲突。结合分布式交通管制(下一节描述),自主式避障,绕障的局部规划,更适合由AMR 来完成。
①局部路由区域,可以实现定义。区域的路径表,也可以配置成静态内存表。正常情况下,按路径表中选择路径。
②增强AMR 的感知能力(可考虑增加接近传感器),自主感知交通冲突。等发生交通冲突后,AMR 自行进行局部路径规划,可以停止等待,可以进行局部绕障路径规划。可以采用VFH 算法(以AMR 为视角的障碍物密度进行方向选择)进行绕障。
通行优先级可按一定交通规则,如东西向让行南北向,先至交叉口者优先等原则;在双向道路上相向冲突,制定如北向绕道让南向AMR 等原则;或者设置全局各AMR 的优先级等等规则。
AMR 自己进行停障或绕障(推荐),绕障方式可以减少等待时间,让整体效率更高。
4.2 交通管制
交通管制是为了防止发生AMR 之间的交通冲突,如果全局计算AMR两两之间的交通冲突,会非常消耗资源。所以,可以考虑多种算法的优化:
4.2.1 缩小到冲突区检测
划分不同的冲突区,将可能出现冲突的交叉口周围画成冲突区,不在同一冲突区范围内或不在冲突可能范围的AMR 就不需要计算。
4.2.2 局部闭锁
在节点密集的库位、停车场等区域,进行局部闭锁的方式。以图4 某项目中的停车区为例。停车场有P1 到P14,14 个停车位,当需要同时出来的时候,就会相互锁死。
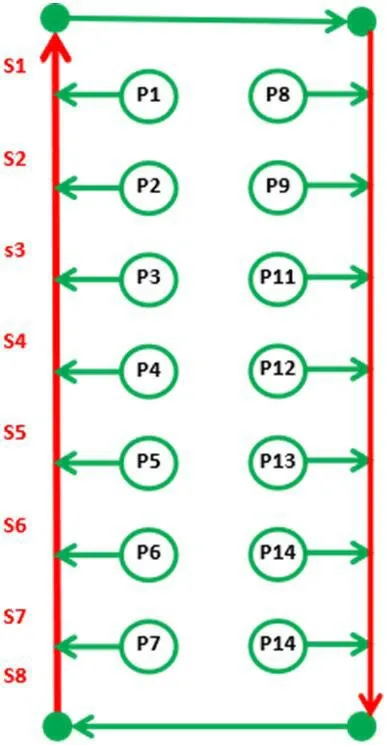
图4: 停车场站点示意图
我们可以尝试一下高铁和地铁的闭锁方式。将停车场这个区域设为闭锁联动区。假设当P6 的AMR 要出库,就请求将S6、S5、S4、S3 闭塞,当没有更高优先级的AMR 同时申请,则调度系统确认闭塞。调度系统若收到有该区域的AMR 上报位置信息,即通知闭锁区域。假设此时有P4 的AMR 要出库,判断路径规划中有S4、S3 被闭塞,则等待闭塞取消。这样做的好处是,当有多台同时出入时,调度系统只需广播闭塞信息,由AMR 自行计算是否停止等待。
4.2.3 分布式管制
同上一节。增强AMR 的感知能力(可考虑增加接近传感器),自主感知交通冲突。等发生交通冲突后,AMR 自行进行局部路径规划,可以停止等待,可以进行局部绕障路径规划。可以采用VFH 算法(以AMR 为视角的障碍物密度进行方向选择)进行绕障。
5 实验及总结
总结第4 章表述的优化方法如表1。

表1:
为了测试这些优化手段的效果,按3.2 设定的标准模型,对以上功能进行对比试验。局部绕障和局部闭锁功能触发条件有限,占总CPU 消耗的比例较小。所以,也没有进行具体的对比。其他几项对比结果(在标准模型)下,单项改进对CPU 消耗的对比,如表2。

表2:
综上,通过对影响多机调度性能的因素的分析,建立了一个标准化业务模型和性能指标表征方法。并通过优化算法,计算调度性能进行对比,验证了模型的可用性。
