基于折纸机构的上肢外骨骼
2022-07-10张锐浩张玉辉
张锐浩, 张 帆, 张玉辉
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
与上肢工作有关的肌肉骨骼疾病日益受到人们的关注,它通常是由重复或长期的体力劳动引起的。这种由职业原因引起的肌肉损伤疾病称为职业性肌肉骨骼疾病(work-related musculoskeletal disorders, WMSDs)[1]。据统计在美国,14.9%的肌肉骨骼病例报告与上肢工作相关[2]。尽管机器人、自动化、机械化和其他与工作相关的干预在工业中广泛使用,但仍有许多任务由工人手工完成。手工作业在许多工业制造业工作中仍然是非常必要的,例如车辆底部的安装/维修工作,飞机机身内部的安装和维修,以及高空钻孔作业和喷漆等[3]。并且,由于成本和工作性质,这些工作可能不容易被机械所取代。近年来,人们开始使用外骨骼等外部支持设备来帮助预防肌肉骨骼疾病。例如,Macdermid等[4]研制的Levitate外骨骼,是一种轻量的可穿戴外骨骼,旨在支持工人重复的手臂运动或静态的手臂抬高,将手臂的重量从肩膀、颈部和上背部转移到核心身体,部分缓解上肢肌肉和肩关节的压力。Murata Y等[5]设计了一种新型的半被动上肢外骨骼H-PULSE用于辅助水平的工作支撑,由弹簧预张紧机构、主轴驱动和伺服电机组成,该外骨骼可以减少肌肉紧张,同时可以降低在长时间持续的开销活动中肌肉疲劳水平。Amir等[6]研制了Exo-Jacket外骨骼,该外骨骼总共有3个驱动力关节,这些驱动力关节支持肘部和肩部的屈伸,以及肩部的外展和内收,主要用于减少工业物流应用时的肌肉骨骼损伤,既可以稳定上半身组装任务的手臂,减轻肘关节、肩关节和脊柱的负荷,同时,也可以通过增强人体关节来提高物流效率。
然而,相对于传统的外骨骼结构,一些研究者已经提出利用刚性折纸机构设计外骨骼机器人。Matthew A Robertson等[7]利用了折纸启发的构造方法,以及软气动执行器基于3个“waterbomb”基腿设计了一个并联运动机构,该机构为气动驱动,可应用于穿戴外骨骼领域。Seongmin Seo等[8]通过在织物、纤维增强材料中嵌入刚性折纸结构开发了一种耐用、适应性强,由软气动执行器驱动,可支持上肢运动的可穿戴系统,可以在不干扰上肢自然运动的情况下辅助上肢工作和运动。
课题组结合刚性折纸机构重量轻、结构简单和刚度高等优点设计上肢外骨骼机构。首先基于刚性折纸机构的折叠特性设计了上肢外骨骼的肘关节。为了能较好地契合人体上肢的运动,和降低外骨骼设计的复杂度,采用连杆机构设计上肢外骨骼的肩关节;同时为了能具有较好的穿戴效果,将外骨骼固定在背部。该上肢外骨骼具有结构简单、轻便,和易于折叠和自锁的特点。课题组首先设计了上肢外骨骼的构型,然后对肘关节进行运动学分析,得到肘关节自锁时的折叠角度,最后分析肩关节外骨骼的运动位姿和工作空间。
1 上肢外骨骼的设计
1.1 肘关节的设计
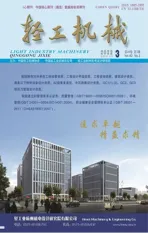
课题组设计了2个对称的5折痕顶点折纸机构作为上肢外骨骼的肘关节机构,其折痕分布如图1所示,其中实线表示山线,虚线表示谷线。由图1可以看出,该肘关节机构由2个矩形、4个梯形和2个三角形组成。其中:矩形的长为a5,宽为a6;中间三角形的底边长为a1,斜边长为a2;梯形的顶边长为a3,高为a4;矩形的2条折痕的夹角为α12,梯形的底角为α23,中间三角形的顶角为α34。折纸机构的运动折叠完成效果如图2所示。当折纸机构中的面1固定时,机构的主运动为面2绕转轴相对于面1做定轴转动,这与人体上肢肘关节的屈曲和伸展运动类似。当折叠运动停止时面4分别与面3和面5重合形成了自锁,机构无法进一步运动,形成了折纸机构的自锁特征。此时的机构可以为工人工作时的肘关节提供力的支撑。
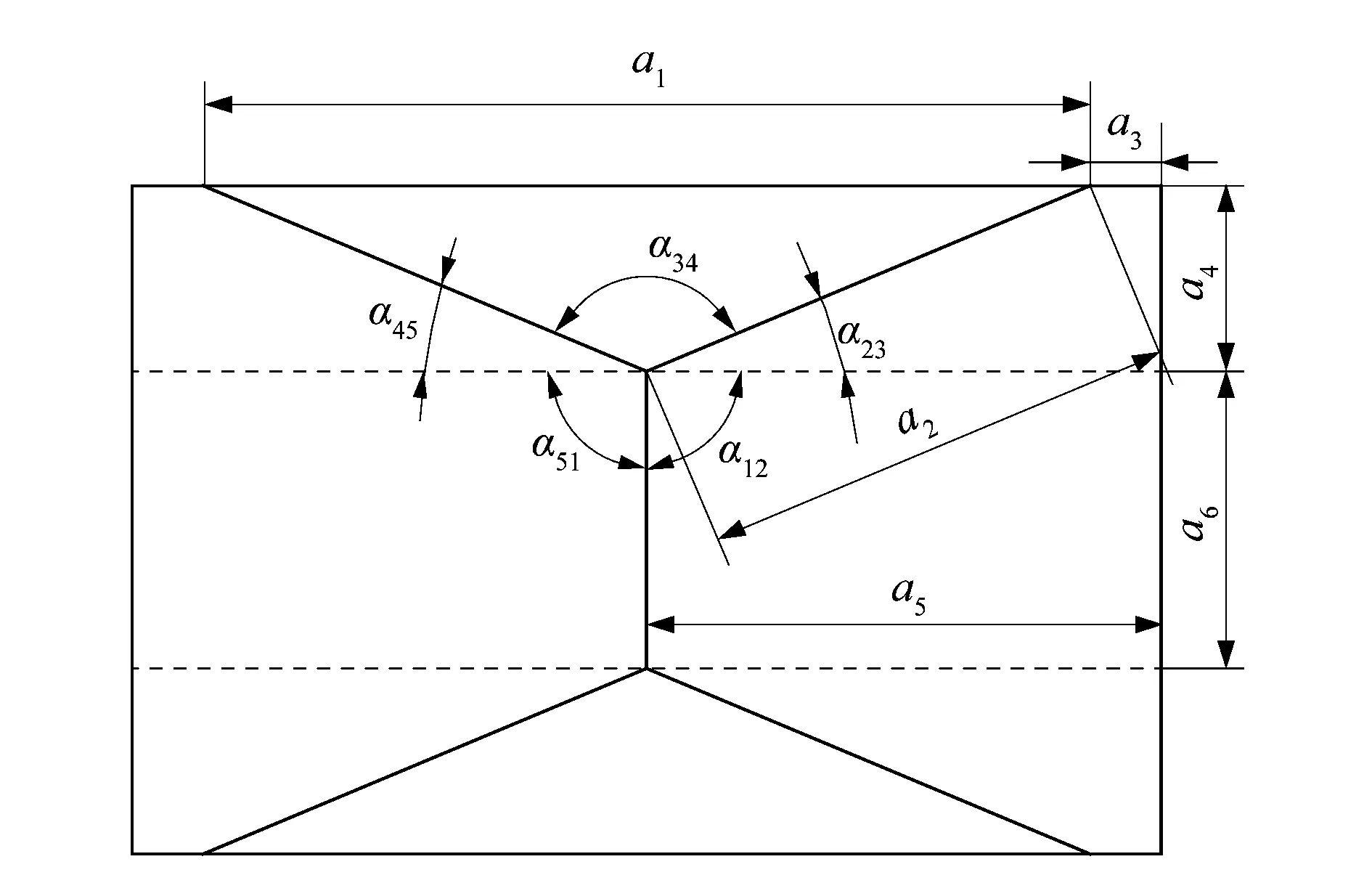
图1 肘关节机构平面展开图Figure 1 Unfolded plan of elbow mechanism

图2 折纸机构折叠图Figure 2 Folding diagram of elbow mechanism
1.2 肩关节的设计
为了使外骨骼有良好穿戴效果,外骨骼的设计需要具有良好的拟人性。课题组设计的肩关节外骨骼具有5个自由度:其中3个自由度与人体肩关节的自由度相符合,可实现肩关节的屈曲/伸展、外展/内收和内部/外部旋转;另外2个自由度是为了调节外骨骼的尺寸而设计的,可更好的贴合不同尺寸工人的肩关节运动,从而提高穿戴者的舒适性。
上肢外骨骼背部固定通过图3所示的背带实现,背带与身体连接较为紧密,可以实现牢固的身体连接和较低的滑动风险。调整机构和背板固定在背带上。背板孔和调整机构的孔配对使用实现外骨骼垂直高度的调节,以匹配不同尺寸的使用者。

图3 上肢外骨骼三维图Figure 3 Three dimensional view of upper limb exoskeleton
外骨骼固定部分中的调整机构依次连接了一个双铰链机构和肩部的主板,如图3所示。双铰链机构与调整机构配合的关节为转轴1,与主板连接的关节为转轴2。双铰链机构上的2个旋转关节不仅能使外骨骼被动地跟踪上肢肩关节的外展和内收运动,还可以通过调节双铰链机构的尺寸来调整外骨骼肩部的尺寸,以配合不同的人体肩部尺寸。调整机构的2个转轴(转轴1和2)是肩关节的2个被动自由度,是为了调节外骨骼的尺寸而设计的,可以提高穿戴者的舒适性。
杆件1与肩部的主板通过转轴3连接,该运动关节可以实现肩关节的伸展和屈曲运动。此运动关节的活动以水平中心位置为分割线,限制在±π/4范围之内,这是基于人体上肢肩关节的屈曲和伸展运动范围设计的。且背部主板与杆件1连接处的结构可以修改,以提供不同的角度运动约束。为了确保外骨骼保持一定的运动位姿,需为此处的旋转关节提供一定的外力以克服重力和其他外力的影响。此处选择电机驱动提供所需的外力,电机安装在主板上。
杆件1与杆件2通过转轴4连接,该运动关节可以实现肩关节的内收和外展运动。为了减轻外骨骼的重量和外骨骼设计的复杂程度,课题组将此运动关节设计为被动关节,通过限位装置限制此运动关节的运动范围。
杆件2与平行杆机构通过转轴5和转轴6进行连接以实现肩关节的内部和外部旋转运动。为了确保外骨骼保持一定的运动位姿,需为转轴5和转轴6处的旋转关节提供一定的外力,以克服重力和其他外力的影响。课题组在杆件2的转轴5和转轴6处装配2个电机,同步为平行杆机构的运动提供动力。相较于使用单个电机,2个电机同步提供动力可以为作业人员提供更加稳定的支撑。该平行杆机构的运动范围如图4所示,以水平中心位置为分割线,限制在±π/6范围之内。平行杆机构2的末端设计了一个圆弧形的支撑结构作为上肢肩关节支撑或助力的支点,减轻使用者工作时上肢肩关节的肌肉受力。

肘关节机构与肩关节机构通过杆件连接。此运动杆件允许小范围的转动,以应对上肢作业时的作业不同姿势。
2 肘关节机构运动学分析
采用D-H法分析刚性折纸机构的折叠运动,其中铰链连杆坐标系如图5所示,其中zi轴方向沿铰链的旋转中心向上,xi是轴zi-1与z轴的公垂线,正方向指向zi轴方向,通过右手定则确定yi的方向。连杆的长度ai(i+1)是沿xi+1方向zi与zi+1之间的垂直距离,偏距Ri是沿zi轴方向xi轴与xi+1轴的距离,机构的运动变量θi表示沿zi轴方向xi到xi+1所转过的角度,αi(i+1)是沿xi+1轴方向从zi轴转到zi+1轴所转过的角度。

图5 铰链连杆坐标系Figure 5 Coordinate system of hinge link
由图5可得,相邻两坐标系间的变换矩阵为:
(1)
或者是
(2)


图6 单顶点5折痕折纸图案Figure 6 Fold origami with single vertex and five creases
单闭环5杆机构如图6所示,其闭环方程为:
(3)
或者是
(4)

式(4)变为
(5)

根据零厚度刚性折纸理论[9]可将5折痕顶点折纸机构等效为球面5杆机构,如图6所示。其中:zi代表折痕铰链i所在坐标系的z轴轴线,φi表示该折痕铰链所在两平面的二面角,θi表示铰链旋转的角度,即运动变量。如果折痕为山线(实线),则θi=π-φi,如果折痕为谷线(虚线),则θi=π+φi。αi(i+1)表示折痕i与折痕i+1所围成的扇形角,其中:
(6)
球面5杆机构具有2个自由度,肘关节机构由2个球面5杆机构共用1个峰折痕组合而成具有多个自由度和多种运动方式。然而,可通过设定山谷线的布置和对称性约束使其准确的按照预定的方式运动,铰链的旋转角度满足以下的关系:
(7)
由1.1节中可知道当自锁特性发生时,折纸面重合必然存在一个转角θ的值为π,则结合折痕的分布可得,转角为π的转角为θ2或θ3。
假设折纸机构发生自锁时θ2=π,并将式(6),(7)代入方程(5),此时方程无解,不满足要求。
假设折纸机构发生自锁时θ3=π,并将式(6),(7)代入方程(5),此时可以求解得:
(8)
由图6可以得α23+α34+α45=π,又α23=α45,则有2α23=π-α34,结合式(8)可知当α34取不同的值时,θ2和θ3的值确定,θ1转角不同,则肘关节的最终自锁折叠角度不同,因此可以根据需要的最终折叠角度θ1选择不同的α34。
3 肩关节运动学分析
如图7所示,为了确定肩关节各连杆之间的相对运动关系,在各个连杆上分别固接坐标系。坐标系{O0}固接在基座上,各个连杆的转轴为z轴,各个杆件的坐标的变换过程如图5所示,则基于D-H法的各个连杆的参数如表1所示。
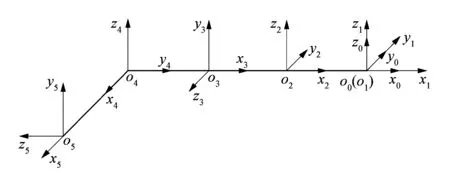
图7 肩关节外骨骼坐标系Figure 7 Coordinate system of shoulder exoskeleton

表1 肩关节各连杆关节参数

则肩关节外骨骼的末端坐标系{O5}相对于基坐标系{O0}的变换矩阵表示为:

与基于坐标系{O0}的肩关节初始位姿完全一致。
4 运动空间
为了解肩关节外骨骼机构能否满足人体上肢肩关节正常工作运动的需求,对上肢外骨骼肩关节机构的工作空间进行分析。对于工作空间的计算方法有:解析法、图解法和数值法等[10],课题组采用蒙特卡洛法[11]对外骨骼工作空间求解并利用MATLAB将结果可视化。
将肩关节外骨骼能到达的空间记为W(p),则各关节变量和运动空间的关系表示如下:
W(p)={P(θi)|θi∈Q}。
(9)
其中:θi表示旋转关节转角,且i=1,2,3,4,5;Q为空间约束,且有Q={(θi)|θi,min≤θi≤θi,max,i=1,2,3,4,5},其中θi,min和θi,max分别表示旋转关节的极限角度。
在建立了肩关节外骨骼的运动学方程基础上,使用蒙特卡洛算法(利用随机数值求解问题)对模型进行运动空间分析,步骤如下:
1) 由表1中的肩关节各连杆的D-H参数在MATLAB中建立肩关节外骨骼模型。
2) 采用随机函数rand ()获取随机数,关节变量取值可表示为:
θ=θmin+(θmax-θmin)×rand (x)。
(10)
式中x为随机函数的参数。
3) 将步骤2)产生的变量代入由D-H参数建立的肩关节外骨骼运动学模型中,通过多次的随机数循环获取,获得所有关节变量范围内的运动学数据,并将数据存储,选择循环次数为2 000。最后使用MATLAB的Plot函数将上述结果可视化,生成肩关节外骨骼的运动空间如图8所示。
图8 肩关节外骨骼运动空间Figure 8 Movement space of shoulder exoskeleton
由图8可看出外骨骼的运动空间与人体肩关节的运动空间相近,由此可知设计的外骨骼模型并未限制人体肩关节的运动,符合外骨骼的设计原则,设计的外骨骼机构满足使用要求。
5 结语
课题组基于刚性折纸的自锁特性,设计了一种包含2个单顶点5折痕的折纸肘关节,其运动形式满足人体上肢肘关节的屈伸运动。此肘关节具有结构简单、轻便和易于折叠的特性,不需额外的锁定机构便可提供支撑。考虑到人体上肢肩关节的运动形式,课题组采用连杆机构设计肩关节,使其能较好地贴合人体上肢肩关节的运动,机构的驱动能较为简单地实现,降低了外骨骼系统集成的复杂性;基于D-H法分析肘关节的自锁角度和肩关节外骨骼的位姿,基于蒙特卡洛算法分析肩关节外骨骼的运动空间。分析结果表明此上肢外骨骼的设计较为合理,能满足人体上肢的运动需求。文中的运动学分析方法可为后续外骨骼的动力学分析和运动控制提供借鉴。