基于矿井GIS地图的煤矿智能化电机车升级改造
2022-07-10李竹年
李竹年
(中煤新集能源股份有限公司刘庄煤矿,安徽 颍上 236200)
0 引言
近年来,我国煤矿智能化建设取得积极进展,从中央到地方,智能化矿山建设的相关文件频频出台,煤炭行业吹响了向智能化煤矿迈进的集结号,虽然煤矿的智能化建设取得了阶段性的成果,但是距离全面实现智能化煤矿建设还有较大的差距。
众所周知,技术革新是推动产业升级的重要动能,伴随着物联网、5G、大数据、AI等技术应用于煤矿,为煤矿行业的装备升级提供了基础保障。智能化电机车就是基于GIS地图、5G通信网络及AI技术进行升级改造的辅助运输设备。
本文对电机车智能化改造升级及在煤矿井下应用进行研究,列举出智能化电机车的技术要求,具备的功能,所需要的设备,所具备的驾驶模式等方面做出介绍,为提高矿井生产效率与新建矿井辅助运输方式的选择提供新思路。
1 电机车智能化升级改造内容
智能化电机车以无线通信网络及千兆工业以太网络为传输平台,以轨道运输监控系统为依托,采用井下机车精确定位技术、视频图像处理技术和矿井GIS地图系统技术,并结合电机车变频控制及远程拟人化操作的矿井安全生产运输综合监控系统,实现电机车智能驾驶。系统具有多种控制工作模式:在装卸作业环节,配备手持式遥控器,就近遥控控制;干线主运输线路,由地面控制中心拟人化操作台远程控制或自动控制;在不需要遥控或自动控制时,使用人工控制。
改造内容主要包括制动系统、车辆传感设备系统、车辆智能控制和执行系统。车辆改造后具备的功能包括:障碍物的识别、避障等功能、车辆自动制动和停车、车辆具备远程被控功能、在调度系统的指挥下,车辆具有自动驾驶、车辆辅助驾驶功能。机车具有自主定位和自主避障功能,使得不完全依赖网络进行定位或者调度,提升机车的主动安全能力。
2 智能化电机车升级改造所需设备
主要由车载通信控制器(含电源)、车载视频摄像仪、障碍物检测装置、主动定位装置等组成,具有无线通信接口,实现与主控系统之间的数据交换。
2.1 地面控制系统设备
在地面集控中心设置主控服务器、远程控制台等。
(1)服务器2台,用于测控数据的处理、流媒体服务、WEB发布、通信服务管理等。
(2)千兆网络交换机2台。用于与井下专用环网之间的通讯,并与控制台之间进行数据交换。
(3)海康威视网络硬盘录像机1套,用于井下移动视频、固定点视频摄像仪的信息采集、储存和处理。
2.2 远程驾驶控制台
在地面调度中心设置的远程控制台,对井下智能电机车进行远程操作控制。主要设备:工控机、嵌入式触摸屏计算机,用于组建遥控驾驶控制台、调度控制、视频管理等。
2.3 其他巷道内设备
道岔、阻车器等实现远控、司控(遥控)或自动控制,道岔安装岔位自动显示装置,机车通过风门来实现司控(遥控)或自动控制。
2.3.1 司控道岔改造和升级
司控道岔控制箱作为隔爆兼本安型矿用设备,用于轨道道岔驱动设备的控制,控制箱在系统中作为司控道岔的驱动控制设备,将接收到的道岔控制命令转换成相应的功率驱动,完成井下轨道道岔装置的动作,同时将监测到的道岔位置信号传送给监控系统。
(1)计算机控制:在与系统联通后,由计算机自动控制,此时其他控制无效;
(2)本机控制:使用本机按钮实现本地控制,此控制方式仅当计算机解锁后才有效;
(3)手摇转换:在停电或控制电路出现故障时,可用手动摇柄来转换岔尖方向。
2.3.2 矿用LED信号机控制器
信号机用来给出进路开放与闭锁及运行方向信号。主要功能有以下几点:
(1)以红、绿、黄三种颜色显示,可按需要显示箭头、字符、满盘,显示距离远,观察清晰。
(2)灯光可闪烁显示,可在进路开放进提醒司机、行人,能提高效率,保证安全。
(3)具有故障—安全功能,收到控制编码后执行此模式90s,控制设备必须在此时间内再次控制,否则信号机认为控制设备故障,以保证运输安全。
3 智能电机车升级改造实现的功能
实现辅助驾驶、远程驾驶、遥控驾驶,电机车应具备主动安全、主动定位、运输状态检测等基本功能。
3.1 煤矿井下电机车导航地图构建技术
通过整合矿井现有信息系统的数据资源、硬件设备资源、视频设备资源等,基于矿井空间布局二维重构技术,基于GIS地图,构建辅助运输用的GIS,应用于车载终端导航和地面调度中心。如图1所示,基于矿井GIS地图,凭借先进的人机交互方式,实现矿井可视化管理监控、数据分析驾驶舱等功能。用以提升矿井决策效率,实现矿井的智慧化管理和运营。
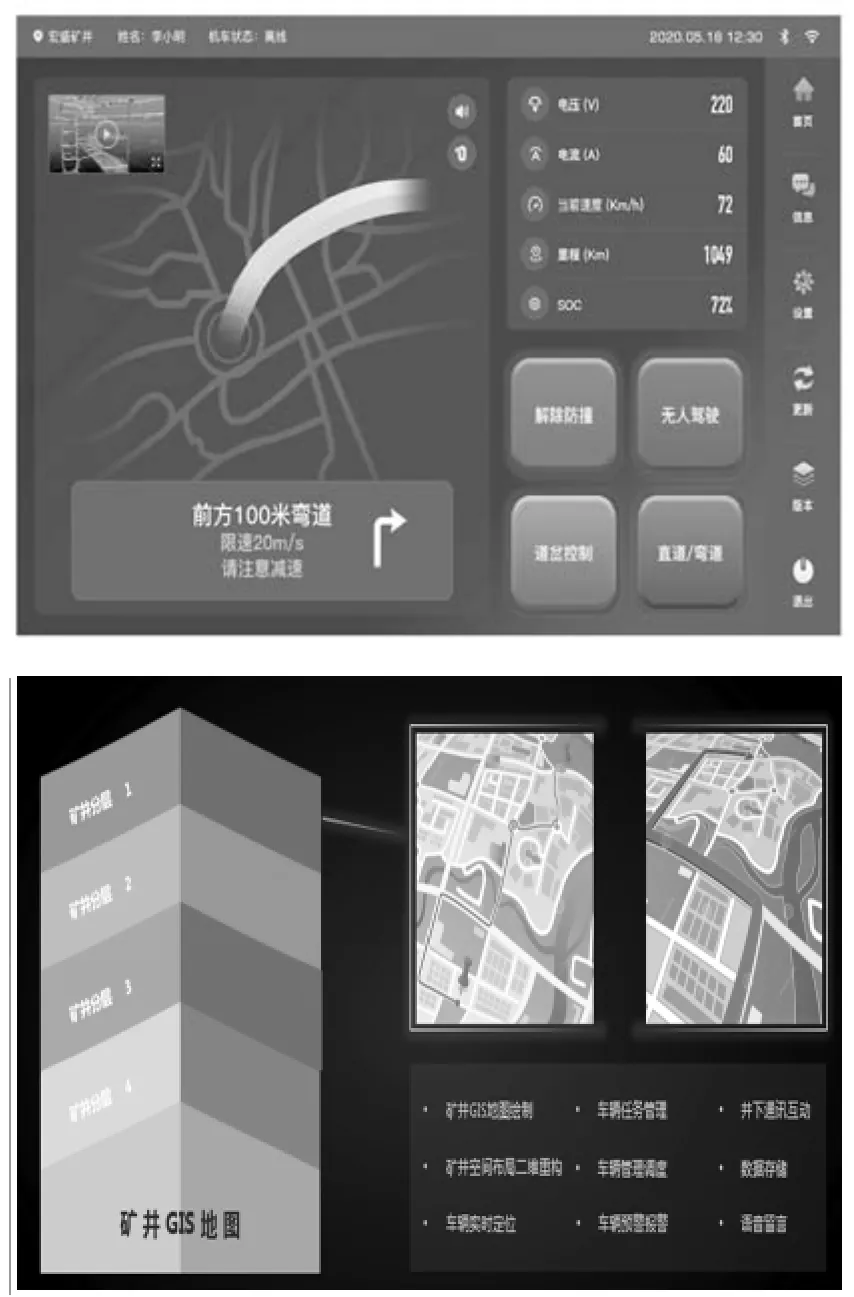
图1 基于GIS的车载终端导航地图
根据实际情况动态管理维护井下地图信息(线路信息),创建/编辑线路时支持添加实际的道路组件,例如,道路上的红绿灯、标志物、司控道岔等,使得矿井的地图更加精准,为车辆的实时位置信息提供依据。
3.2 电机车自主导航
井下电机车在行驶过程中,车载终端将基于激光雷达和RFID的电机车动态融合定位技术计算获取电机车的实际位置,车载终端运用多融合精确定位技术,将各种受限空间,包括弯道、限速区域、红绿灯路口等各种复杂路况下进行车速管理,提高安全性能。
3.3 障碍物识别和避障功能
电机车在煤矿井下运行,复杂的地质条件和运行环境带来了不确定性。辅助驾驶、远程驾驶、遥控驾驶电机车应能精准识别出井下巷道内轨道空间中的静态、动态物体,并进行相关的避障动作。电机车具有AI识别功能,识别到人员和车辆会自动减速停车。
3.4 弯道减速
在弯道入口处/出口处布置定点传感器标签,对机车的速度进行管理。图2为弯道减速示意图。限速分等级进行限速。定点传感器分9个等级,见表1。
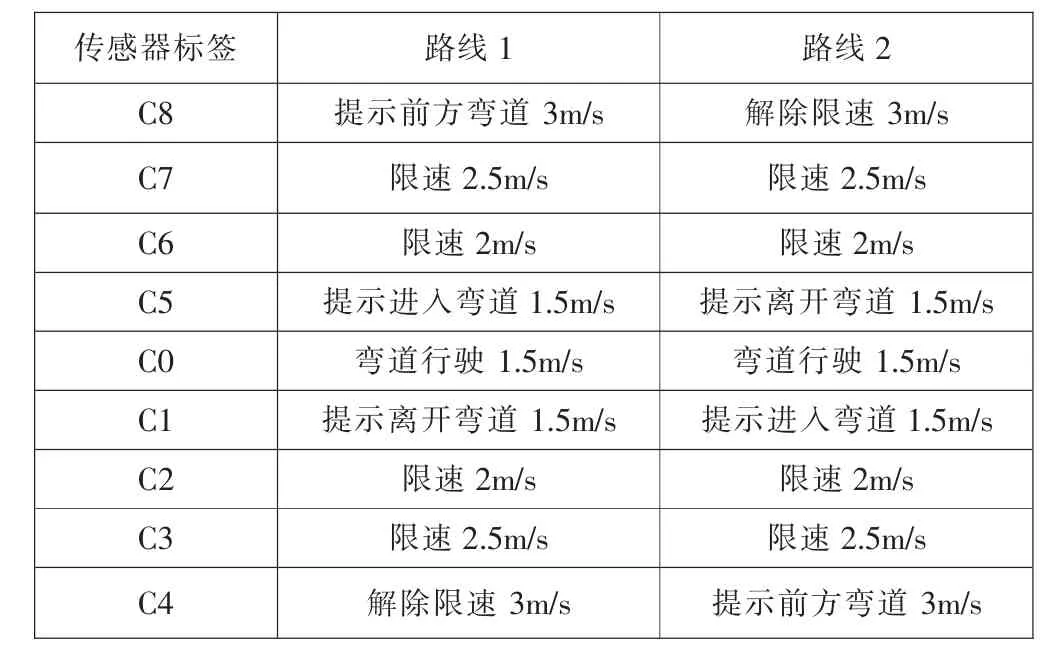
表1 弯道减速布置定点传感器含义
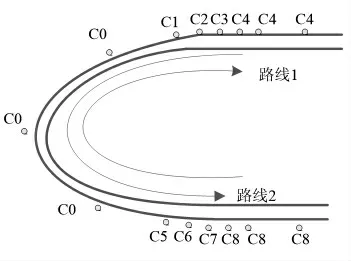
图2 弯道减速示意图
3.5 电机车防追尾
方案采用车载无线射频信号和车载终端接收器实现电机车的防追尾跟踪技术。通过调整发射功率和接收功率,成功实现两者有效信号传输距离大于规定制动距离。当两车距离小于制动距离时按预定策略给出语音提示,或执行刹车。
3.6 电机车能安全穿过无线网络盲区
网络偶尔的异常或者某个点的短期弱覆盖情况的存在,对辅助驾驶、遥控驾驶用电机车的一个基本要求是:在某个特定的弱覆盖(比如2个无线基站的cell交界处),电机车能安全地穿过盲区。且这个弱覆盖区域并非某个特定的区域,会随着网络的动态变化而变化。
3.7 实现智能化电机车的可视化监控
车辆视频系统全视角的监控轨道辅运设备及线路状态,实现可视化监控和调度;通过地面显示屏或井下硐室显示屏、工作站、矿上网络等,根据权限设置,实现对运输过程的全程可视化监控,并提供所见即所得的实时可视化调度。
(1)移动视频。实时上传机车移动视频至车辆调度系统,以便相关领导和调度人员能够及时、直观地掌握井下运输状况。
(2)远程驾驶、自动驾驶(按照指令自动驾驶)等功能。
(3)辅助运输电机车智能调度功能,调度及运行数据的管理和回放功能。
3.8 其他功能要求
(1)运行机车具备即时语音通讯功能;
(2)主要运输大巷和车场应设置视频监控系统,并能实现远程浏览;
(3)根据煤矿井下现场实际情况,在巷道口、硐室口、弯道处设置机车运行自动控声光预报警信号装置,机车顶车作业具备自动声光警示报警装置。
4 智能化电机车具备的驾驶模式
4.1 电机车遥控驾驶模式
电机车配有矿用本安型遥控接收器,通过手持矿用本安型遥控器可控制电机车的启动、停止、前进、后退、点动、加速、减速等操作。方便电机车司机井下摘挂钩、倒车等情况。
4.2 辅助驾驶功能
当司机在车上进行手动模式时,车辆的处于手动模式,人工操作的级别最高。机车监控系统能进行相关的状态显示和记录。机车能识别障碍物、关键位置点等,并报警提醒司机进行相关的操作。
4.3 远程驾驶功能
系统支持调度人员或司机在远程驾驶机车,通过计算机、防爆计算机可在调度室或者井下硐室操作驾驶机车完成运输任务。只需在装料点和卸料点(车场)匹配人员装卸货物,整个运输线路上无须司机随车,运输过程中,车辆上不需要司机。
远程驾驶软件界面上可显示所驾驶机车在运输线路上的具体位置,机车运行的参数,前后视频。
远程键盘及远程驾驶界面的控制区,具有前进、后退、加速、减速、增压、使能、急停、牵停、鸣笛、灯光、运行模式等按钮,调度人员或司机可通过这些按钮实现远程驾驶。
5 结语
煤炭企业生产面临地质构造复杂、自然灾害多、开采难度大、采煤装备自动化程度低、可靠性差等各种问题。建设智慧矿山,变革煤炭生产方式已成为煤炭行业和企业生存、发展的重大战略需要。智能化电机车作为一种新的煤矿辅助运输设备,对于解决煤矿辅助运输从业人员多,改变传统的运输方式具有重大意义,是未来煤矿辅助运输发展的趋势。