自行火炮身管指向测量关键技术综述
2022-07-10程泽俊滕红智韩兰懿石志勇
程泽俊,滕红智,韩兰懿,石志勇
(1.陆军工程大学石家庄校区 车辆工程教研室,河北 石家庄 050001;2.中国人民解放军32180部队,北京 100072)
1 引言
现代战争对武器系统的自主作战能力和精确打击能力提出了更高的要求。为适应现代战争的需求,自行火炮都配置了具有定位定向装置的火控系统,确保自行火炮可以自主定位定向,并根据目标位置将火炮调整到相应的指向,发射炮弹完成对目标的打击。因此,身管指向精度是火控系统的重要性能指标。同时,身管指向测量也是自行火炮调炮精度检测、零位零线调整、射角不一致量检测、瞄准线偏移量检测和自行火炮定位定向系统寻北精度检测的基础。
为准确测量自行火炮身管指向精度,许多学者进行了深入的研究,基于不同的原理,提出了多种方法,如精密光学系统测量;陀螺测量;经纬仪测量;全站仪测量;GPS测量;视觉测量等。根据测量方法的不同,上述方法可以分为相对测量法和绝对测量法。绝对测量法,主要测量相对于地理北向的方位角和相对于水平面的高低角,如陀螺测量法和GPS测量法。相对测量法测量的高低角与绝对测量法一样,但方位角不是相对于地理北向,而是相对于某一参考方向,比如双经纬测量法中参考方向为2台经纬仪的连线方向。
身管指向实际上是身管轴线的指向,因此身管轴向测量必须首先确定身管轴线,在此基础上采用一定的技术确定轴线的指向。对于基于测角原理确定轴线指向的方法,还必须进行布站优化,以提高测量精度。本文分别对身管轴线确定技术、轴线指向确定技术和布站优化技术研究现状进行了分析,并展望了自行火炮身管指向测量技术未来发展趋势。
2 自行火炮身管轴线确定技术
身管轴线确定是身管指向测量的基础。基于不同测量原理,身管轴线确定方法不同。分析现有测量方法,身管轴线确定方法可以分为标线解析法和轴线模拟法。
2.1 标线解析法
所谓标线解析法,就是在身管外表面设置若干标记点(通常选取2~7个),通过建立合适的模型,确定身管实际轴线与身管外标记点间连线(即标线)的关系,在实际测量中,通过测量标线的指向,经过修正得到轴线的指向,以达到确定身管实际轴线的目的。
冯仲科等将火炮身管等效成圆台模型,认为2个标记点的连线与身管轴线位于同一平面,通过测量标记点身管的半径,确定标线与轴线之间的夹角。谢杰涛等在身管上设置3个标记点,2个标记点靠近身管尾部,一个靠近炮口,尾部两个标记点分别与炮口标记点形成两条标线,基于身管在任意角度下两条标线与身管轴线的夹角余弦不变,可以实现一次标定实现多次测量。
解析法中关于标记点个数的选取,总的趋势是点数越多,测量精度越高。但考虑到增加标记点数量,同时也会增加测量的工作量。故综合考虑减少测量工作量和提高测量精度这两个因素,应选取5个标记点为宜。
2.2 轴线模拟法
轴线模拟法通过寻找身管实际轴线的平行线或实际轴线延伸线,利用找到的平行线或轴线延伸线模拟身管实际轴线。因此该方法分为平行线法和延长线法。
延长线法通常应用于需要在火炮身管上安装测试设备的身管轴线指向确定方案中。在精密光学系统测量身管指向方案中,保证测试设备紧密安装于自行火炮身管上,设备指向与身管指向严格统一,可认为测试设备轴线与身管轴线平行,以测试设备轴线模拟实际身管轴线。其中激光器+PSD靶的测量方法、CCD+点光源的测量方法中利用激光器(点光源)发射的激光(可见光)模拟身管轴线,CCD相机+特制靶方法中通过相机视轴模拟身轴线;陀螺测量方案中,将陀螺传感器安装于炮口,调整陀螺敏感轴与实际身管轴线平行以达到模拟身管实际轴线的目的;“瞄准点法”中通过调整炮口与炮尾设置的靶盘中心直至瞄准点、炮口靶心、炮尾靶心三点共线,可认为两靶盘中心连线与身管实际轴线平行,以达到模拟实际轴线的效果;
延长线法通常应用于外置测试设备(如经纬仪、全站仪)的身管轴线指向确定方案中。汪伟等设计了引出虚拟轴线的机械定位装置,将轴线定位架紧密固定于炮口内侧,利用与定位架同轴的装置延伸段模拟实际身管轴线。各轴线确定方案特点总结如表1所示。

表1 轴线确定方案特点
3 轴线指向确定技术
身管指向测量就是采用一定的技术手段确定身管轴线在空间中的位置。目前常用方法包括:精密光学系统测量;陀螺测量;经纬仪测量;全站仪测量;GPS测量;视觉测量等方法。
3.1 精密光学系统测量
精密光学系统测量方案的核心为光敏元件,利用其感光特性完成轴线指向确定。其方案主要分为两类:一类通过系统中光敏元件的感光特性制成特殊靶板,通过靶板上光点的位置变化反应轴线指向;另一类则通过光敏元件制成的相机拍摄的靶位图像变化确定轴线指向。测量原理如图1所示:通过紧密安装于地面火炮身管上的脉冲激光器发射激光照射靶板,随后激光通过透镜后照射到光敏元件上,使光敏元件有信号输出,从而获得初始的参考指向。随后调整身管至测量姿态,重复上述操作,即可获得基于参考指向的相对指向以完成测量。方案中光敏元件主要采用:位置探测器(position sensitive detector,PSD)、电荷耦合器件(charge-coupled device,CCD)。
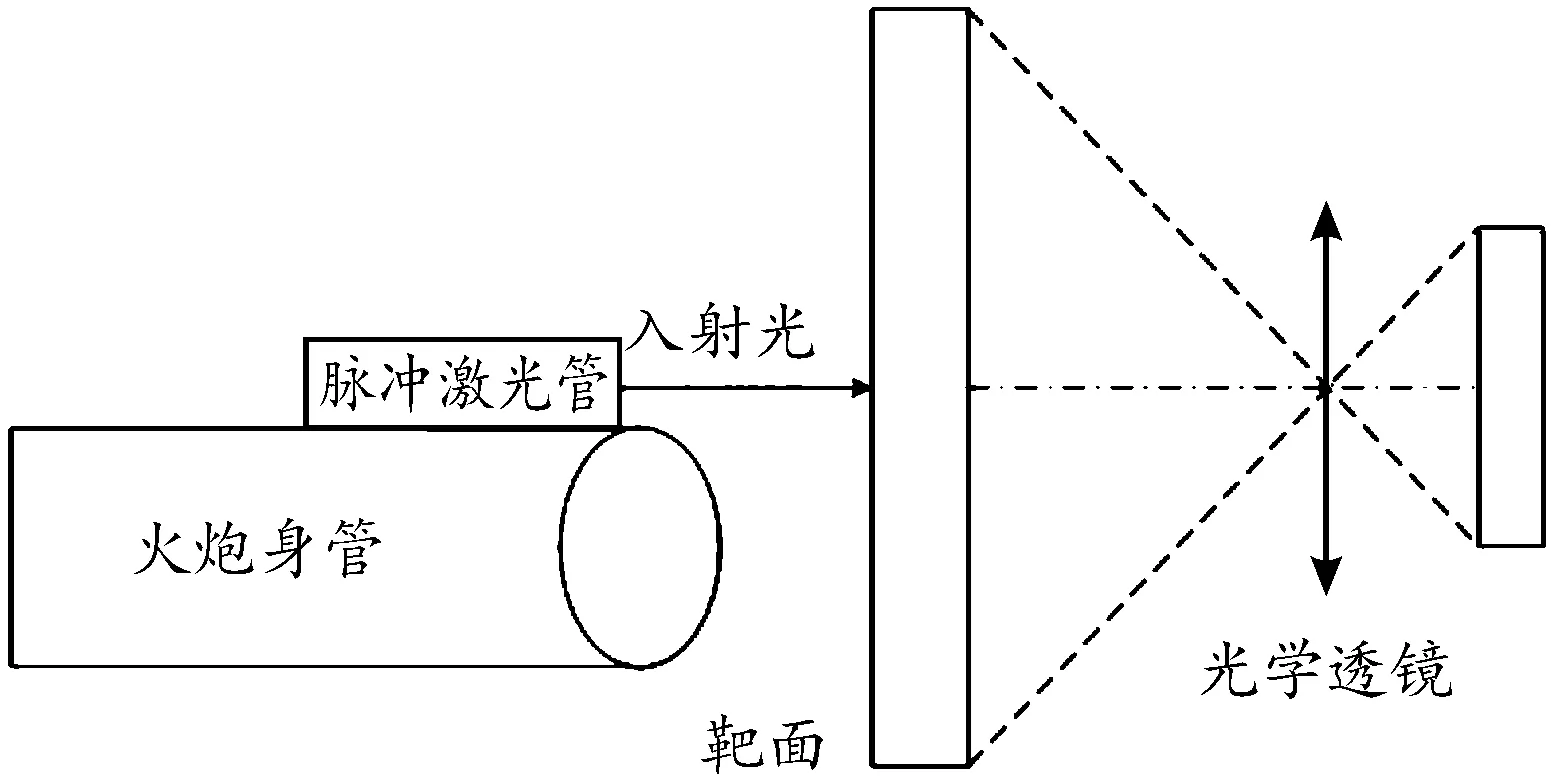
图1 精密光学系统测量原理示意图
赫赤等提出了基于PSD和CCD元件的多种精密光学系统测量方法,王春燕等提出了一种基于CCD成像技术的多光轴光学系统,可达到0.1 mil的测量精度。孙昊等研究了一种基于CCD的火控性能参数静态测试系统,静态测量精度约0.2 mil。
采用PSD及CCD的精密光学系统测量方案优点在于系统响应快、分辨率高、消除了人眼观察的随机误差、减小了测量过程的系统误差,测量过程较为省时。但受靶板尺寸的限制较大,测量范围很小。此外采用PSD的测量方法易受环境光干扰,成像系统边缘存在畸变,在图像边缘处的测量误差较大。CCD相机+特制靶的方法中,在测量前要进行特制靶的网格绘制,较为繁琐。而王春燕等设计的多光轴成像系统虽能达到0.1 mil的测量精度,但对测试设备的光轴一致性要求较高,且进行动态测量过程中信号系统受噪声影响较大。
3.2 陀螺测量
基于陀螺的测量方案则是根据陀螺自身的测角能力确定身管轴线指向,将陀螺传感器安装于炮口,调整陀螺仪敏感轴与身管轴线平行后,通过陀螺仪显示的角度变化即可确定轴线指向。王春忠等设计了一台采用高精度电调谐两轴角速度陀螺仪的炮控精度仪,严德斌则以3个互相垂直安装的激光陀螺和3个加速度计为测量系统主体设计了一套火炮身管指向系统。
利用陀螺进行测量的方法忽略了调炮过程中方位角与俯仰角之间的耦合效应,与实际情况不符,且无法保证 0.2 mil的测量精度要求。针对耦合效应,韩崇伟等设计了采用四元数的伺服控制系统来解决。
3.3 经纬仪测量
双经纬仪法测量是利用经纬仪解算标记点连线空间指向,根据数学模型中确定的标线与实际身管轴线的关系,确定轴线指向。其测量原理如图2所示:通过设置在火炮身管一侧的2台经纬仪分别观测设置于炮口和炮尾的标记点,测得身管炮口、炮尾标记点相对于经纬仪连线的高低角、方向角。通过获得的高低角、方向角解算出标记点的空间坐标,再利用空间坐标解算出身管指向。
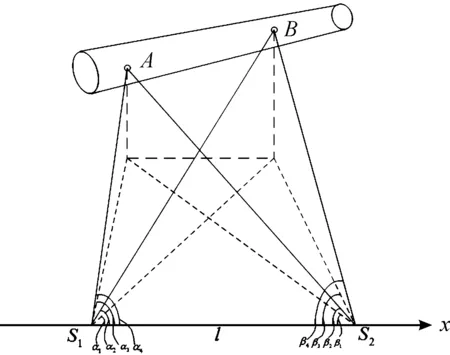
图2 双经纬仪测量原理示意图
2001年由陶化成等首先提出了以2台高精度数字经纬仪为基础的压制兵器身管指向测试系统方案,此方法在后期经不断完善后成为对火炮身管指向进行静态测量的主流方法。Wu D等提出了一种采用经纬仪的大尺寸结构件指向测量方法,具有一定的参考意义。作为目前主流的测量方案,其适应能力强、成本低、测量精度高, 2001年由陶化成等设计的压制兵器身管指向测试系统,静态测量精度可达到0.3 mil,现已低于0.2 mil。Wu D等提出的方法精度甚至达到0.05 mil。但此类方法不能进行动态测量,解算过程较为复杂,虽然静态测量精度高,但测量系统仍存在许多影响因素,主要包括:经纬仪本身测角误差、经纬仪互瞄对准误差引起的测角误差、操作手观测瞄引起的测角误差、经纬仪调平误差引起的测角误差。
3.4 全站仪测量
全站仪测量原理与采用双经纬仪原理大致相同,区别在于相较于经纬仪全站仪具备测距功能,解算坐标时可直接得到全站仪与标记点间的斜距及相应角度,测量原理如图3所示:通过设置在火炮身管一侧的全站仪分别观测设置于炮口和炮尾的标记点,测得身管炮口、炮尾标记点相对于全站仪基线的高低角、方向角、斜距。通过获得的高低角、方向角、斜距解算出标记点的空间坐标,再利用空间坐标解算出身管指向。由于全站仪相较于经纬仪功能更为丰富,使得指向解算过程更为省时,解算更为省时,测量效率提高50%。

图3 单全站仪原理示意图
张光等提出了一种基于全站仪的火炮零线检校方法,曾刊等设计了基于全站仪的调炮精度测量系统。Jincheng Liu等分析了全站仪测量的误差及原因。虽然全站仪测量效率更高,但全站仪测量同样只能进行静态测量,且误差来源同样较多,主要包括:全站仪本身系统误差、观瞄引起的测角(测距)误差、全站仪调平引起的误差等。
3.5 GPS测量
GPS测量法通过在炮尾和炮口设置GPS天线并解算模拟轴线上两点坐标,得到模拟轴线指向。王静等验证了使用GPS测量身管指向的可行性。此方法能进行静态和动态测量,有一定的可行性,但是测量精度难以保证(基线长8 m时,动态测量精度小于0.6 mil,静态测量20 s精度小于0.12 mil),同时GPS易受测试场地天气、磁场等因素影响,使用条件较为苛刻。
3.6 视觉测量
与精密系统测量原理类似,视觉测量通过特征点变化检测模拟轴线指向。区别在于视觉测量的成像系统并非安装于身管上,而是与经纬仪、全站仪测量方案类似,设置于自行火炮身管侧向,而带有特征点靶板则固定于身管上。
其中朱耀轩等提出了一种结合扩展卡尔曼滤波算法、多点透视问题解的单目视觉测量技术,完成了火炮身管指向进行静态测量;全厚德等进行了双目立体视觉下的三重交会测量算法解算火炮身管指向的研究;宋庆华等研究了一种基于摄像机和高精度寻北仪的图像处理技术;齐寰宇等提出了一种自适应阈值的特征点处理算法;Xiaoli H等研究了物面连续离散化后匹配像点的方法。
视觉测量方法既可进行静态测量也可以进行动态测量,同时响应速度快。但在正式测量前需要进行标定和求参,且该方法存在镜头畸变。目前已有的视觉测量方法中,朱耀轩等提出的单目视觉测量技术测得的高低角精度1 mil,方位角精度5 mil,测量精度明显低于基于双经纬仪和全站仪的测量方法,同时也存在方位角测量结果误差明显大于高低角的问题。全厚德等提出的方法高低角平均测量误差为1.133 3°(约18.89 mil),方位角平均测量误差为0.755 3°(约12.59 mil),精度过低。宋庆华等提出的方法相对误差精度约1.6 mil,相较于全厚德、朱耀轩提出的视觉测量方法精度更高,但也远低于基于双经纬仪和全站仪的测量方法。齐寰宇等提出的算法在动态测量下高低角精度低于1.5 mil,但方位角精度达3 mil,方位角误差较大,考虑产生原因是相机对沿光轴信息获取不敏感。Xiaoli H等提出的方法方向角均方根误差为0.97°(约16.17 mil),高低角均方根误差为0.90°(约15 mil)。可以看出,视觉测量方法仍具有发展空间,测量误差和像点提取误差有待解决,可尝试通过改善硬件、优化算法、多角度多相机布阵等方式以提高精度。各类测量方案特点如表2所示。
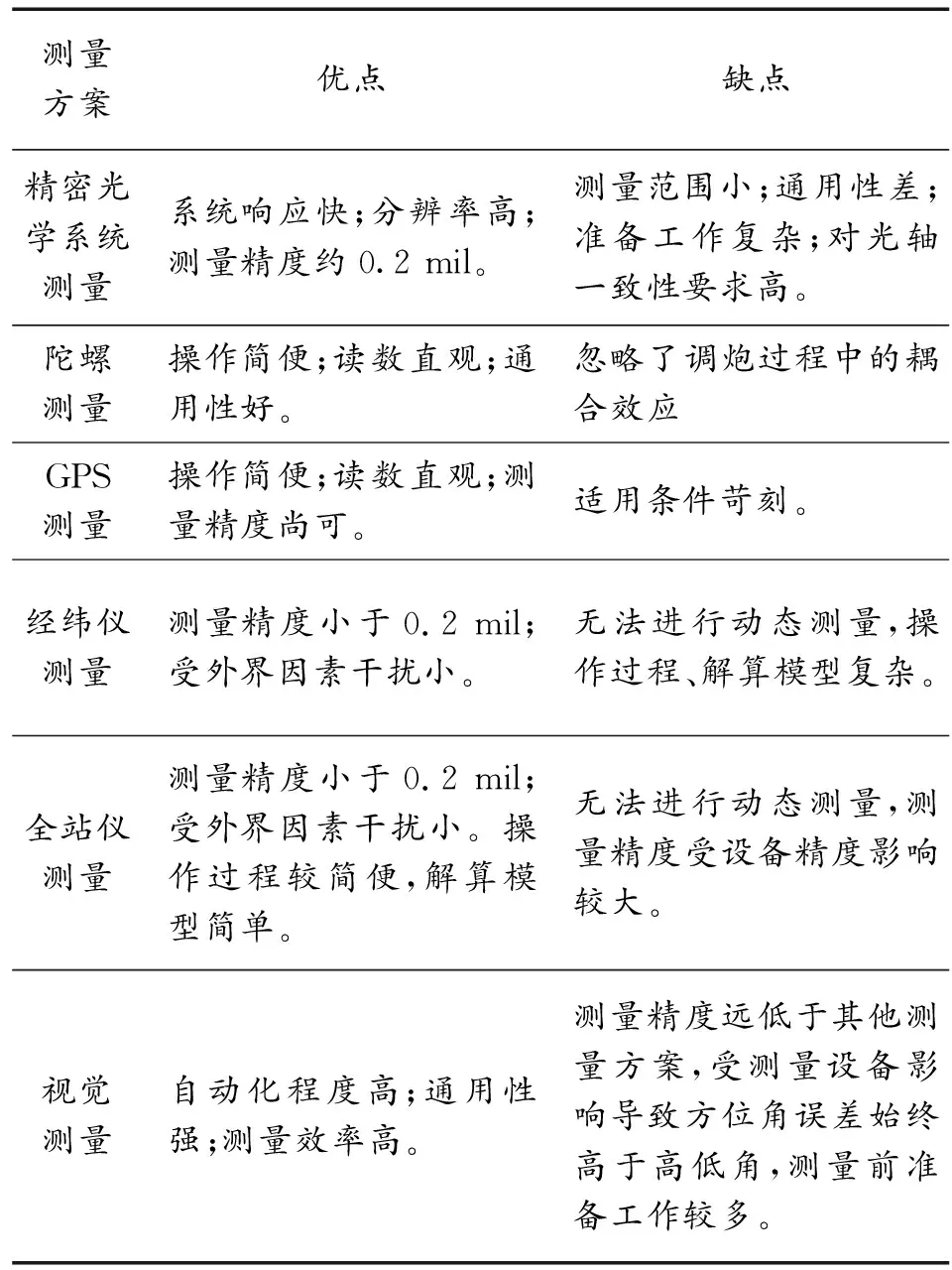
表2 各测量方案特点比较
4 布站方案优化技术
在采用经纬仪、全站仪确定轴线指向的过程中,设站点位的不同会造成测量误差不同,为减小布站方案对测量的影响,需寻找一个对测量精度影响较小的设站点位。
4.1 技术实现原理
优化技术是在身管状态及标记点位置关系保持不变的情况下,在给定的布站区域内寻找设站最优解。通过建立待优化测量方案的布站数学模型,推导确定布站模型的不确定度函数,并引入适当的寻优算法,最终得到给定区域内最佳的设站点。目前研究人员常用的寻优方案主要分为2种:遗传算法和蒙特卡洛法。
4.2 遗传算法(genetic algorithm,GA)
GA是一种基于仿生原理的寻优算法,通过模拟的自然选择、变异,实现种群向更高的适应度进化以达到全局最优。简单遗传算法(simple genetic algorithm,SGA)的寻优过程为:根据待解问题建立模型,其次进行参数初始化设置、计算个体适应度,并按设定的规则选择进入下一代的个体,按设定的概率概率进行交叉、变异操作。若满足终止条件,则输出适应度最优的解;若不满足,则重复上述操作直至满足终止条件并输出最优解。
SGA具有适用性好、鲁棒性强等优点,但其存在过早收敛、全局优化速度慢、没有较好的参数设置准则等问题。为此,研究人员通过选择合适的基本遗传算子(选择算子、交叉算子、变异算子)来解决算法存在的问题。除了通过选择合适的遗传算子外,研究人员还通过改进适应度函数、优化初始种群个体、调整搜索区间等方式对SGA进行优化。Rana S等通过对初始个体进行优化以提高初始个体适应度以提高算法的收敛速度。Yongfeng Fang等改进了适应度函数以达到快速收敛的目的。
董起顺等认为测量误差可以通过寻找最优布站方式得以控制,并提出了一种在经纬仪基线长一定的前提下的局部寻优方法。孙泽林等认为应先确定身管上标记点的位置后再进行经纬仪布站,否则会出现根据最优布站方式解算出的标记点间距离超出身管长度的情况,张光等提出了一种基于SGA的双经纬仪布站寻优方法,均实现了优化布站并提高了指向精度。方案虽能一定程度上提高检测测量精度,但由于初始个体的随机性,每次运行算法得到的结果均不相同。仅比较了优化方案下和随机情况的布站精度比较,没有对优化方案下的不同结果进行量化比较,所求问题解是否是全局最优解仍有待研究。
4.3 蒙特卡洛法(monte carlo method,MCM)
MCM又称统计模拟方法,是一种以概率统计理论为指导的一类数值计算方法,抽取大量的随机数作为样本进行试验,通过得到的统计特征值推定问题解,其核心在于“随机抽样”与“统计实验”。MCM的一般实现过程为:根据待解问题的特点构造模拟模型,通过处理大量数据得到精度较高的问题解。其优势在于:误差与问题的维数无关。对于连续性的问题不必进行离散化处理,可以直接解决具有统计性质的问题。而缺陷则在于:存在概率误差、计算步数较多导致计算时间较长,对于确定性问题需要转化成随机性问题后再进行处理。
谢杰涛等提出了一种基于MCM的双经纬仪布站寻优方法,不仅可以计算给定布站方案的测试精度,而且能给出满足测试精度的布站方案。刘志鹏等研究了基于MCM的布站方案对指向精度的影响,建立身管指向测试方案的不确定度函数,通过随机抽样代入函数求解得到该布站点下不确定度函数的值,分析比较可得出给定范围下的最佳布站方式。
5 结论和展望
1) 建立并引入检测区的北向基准。现代战争对自行火炮的自主作战能力和精确打击能力提出了更高的要求,现有方案检测的身管指向均为相对于自行火炮车身的相对指向,而实际情况下需要检测身管在大地坐标系下的绝对指向。为此,需研究如何建立北向基准并在现有测量方案中引入北向基准,完成在大地坐标系下绝对指向的测量。考虑采用精密单点定位技术或实时动态差分技术,获取火炮附近两点位于WGS-84坐标系下的坐标。通过获取的坐标可得到已知点位连线与绝对北向的夹角,随后解算检测设备与这两点的位置关系,可得到检测设备处的北向基准。
2) 简化轴线确定过程的操作流程。分析现有轴线确定技术中,由于无需在身管上加装测试设备,标线解析法优于轴线模拟法,但是标线解析法存在选点过少精度较低、选点过多存在冗余的问题。为了保证精度的同时减少冗余,可参考导航领域中描述位姿的方法:欧拉角、旋转矩阵、四元数。以旋转矩阵为例,相对指向测量,选点建立火炮车身坐标系、炮口坐标系,推导自行火炮车身与身管间的旋转关系,解算坐标系间的旋转矩阵后可得到身管的相对指向。若进行绝对指向测量,则需建立检测设备的坐标系作为基准坐标系,并推导基准坐标系与车身坐标系的旋转矩阵。理论上在此方案中火炮身管上仅需选取两标记点,且无需保证标线与轴线严格平行,相对于轴线模拟法中的两点选取要求更低,误差更小。同时,在选择的标记点不变的情况下,一次标定即可实现重复测量。
3) 提升动态测量精度。现有测量方法难以同时满足静态及动态的高精度测量,而静态测量耗时较长,未来发展方向更偏向于动态测量。视觉测量作为新兴技术,适用范围较广,虽动态测量精度低(高低角精度1.5 mil,方位角精度3 mil),但存在较大的发展空间。可考虑进行多角度布站,在炮口处设置若干标记点后,在身管在炮口正对方向、身管一侧、火炮正上方(开阔场地考虑使用无人机)分别设置相机进行视觉测量。可解决视觉测量中棋盘格靶板绘制难度较高、相机对沿光轴信息获取不敏感、像点提取存在误差的问题,同时有待对它进行深入研究使其充分发挥其潜在优势。
4) 改进优化布站方案。目前已有人研究布站方式对测量精度的影响,但采用的寻优方法仅停留在SGA、MCM上。近些年随着计算机科学的持续发展,产生了多种寻优方法,包括:与SGA类似的模拟退火法、免疫算法,受社会昆虫(如蚂蚁、蜜蜂)和群居脊椎动物(如鸟群、鱼群)启发而产生的以蚁群算法、粒子群算法为代表的群智能算法,神经网络算法、随机森林抽样等。这些算法较为成熟完善,在许多寻优问题上均表现性能良好,将这些算法应用到布站寻优上将能得到令人满意的结果。