基于PLC与SolidWorks的三维模型虚拟运动仿真系统的研究
2022-07-10张卫王丽娜班岚迟欢张超
张卫 王丽娜 班岚 迟欢 张超





摘 要:在生产自动化设备时,PLC程序主要是直接在硬件设备上进行调试,设备从设计到加工生产再到组装调试周期较长,而且事先编程好的PLC程序是否正确也无从验证,只能等到设备组装完成后调试程序,这就影响了整个产品交付的周期。基于SolidWorks三维模型虚拟仿真,通过LabVIEW软件来搭建PLC与虚拟模型的桥梁,实现PLC对虚拟模型的控制运动,完成相关程序的编写与调试。
关键词:PLC;SolidWorks;三维模型;运动仿真
中图分类号:TP391.9 文献标识码:A文章编号:2096-4706(2022)05-0104-04
Research on 3D Model Virtual Motion Simulation System Based on PLC and SolidWorks
ZHANG Wei, WANG Lina, BAN Lan, CHI Huan, ZHANG Chao
(Tianjin College, University of Science and Technology Beijing, Tianjin 301830, China)
Abstract: When producing automation equipment, the PLC program is mainly debugged directly on the hardware equipment. The equipment has a long cycle from design to processing and production to assembly and debugging, and it is impossible to verify whether the pre-programmed PLC program is correct. It can only wait until the equipment is assembled then debugs the program after completion, which affects the entire product delivery cycle. Based on SolidWorks 3D model virtual simulation, LabVIEW software is used to build a bridge between PLC and virtual model, to realize control movement to virtual model of PLC, and complete the writing and debugging of relevant programs.
Keywords: PLC; SolidWorks; 3D model; motion simulation
0 引 言
制造業正初步地向智能制造方向转变,越来越多的产品生产趋向于定制生产,产品不再是简单的机械组合,而是包含了电子、材料等新技术的集成,产品已经涉及控制、电子和机械等众多科学范畴,这些领域需要大量的信息交互,他们之间相互影响,相互制约,使产品设计要求较强的并行性,而虚拟模型技术可以很好地解决这一问题[1]。通过虚拟模型技术,技术人员可以在虚拟环境下仿真机械产品运动,其仿真效果与实际情况基本一致。将虚拟三维设计系统(SolidWorks)与一个控制系统(PLC)通讯,可以在产品模型的基础上进行控制系统的设计,一方面可以优化产品结构,另一方面对控制系统进行编程,大大缩短产品的开发周期[2]。
可编程控制器PLC是将计算机技术、通信技术和自动控制技术结合在一起的自动控制设备[3]。随着数据处理和通信技术以及控制技术的发展,PLC控制技术得到了广泛的应用,PLC正在成为工业控制领域的主控器。传统上要想调试PLC程序可以在PLC编程软件上,但PLC软件不能仿真真实的传感器信号或者输出信号,所以常常采用在实际产品设备上运行,调试程序时需要反反复复地修改,因此程序调试会占用很长时间。
本研究以直角三坐标机器人为例,利用LabVIEW作为平台中NI SoftMotion模块实现PLC与SolidWorks通讯,通过PLC控制在SolidWorks三维模型运动,可以实现更逼真的仿真效果,避免了直接在硬件设备上的调试。
1 SolidWorks三维模型设计
1.1 机械建模
应用SolidWorks软件对产品模型机型设计,包括零部件设计、装配体设计以及零部件之间相对运动分析等内容。在SolidWorks软件建模步骤包括:
(1)零件设计。三维模型是通过草图的绘制,在利用拉伸、旋转等特征来实现的,特征是三维实体的基本要素,草图是三维模型的基础。因此,零件设计包括绘制零件草图和生成三维模型。
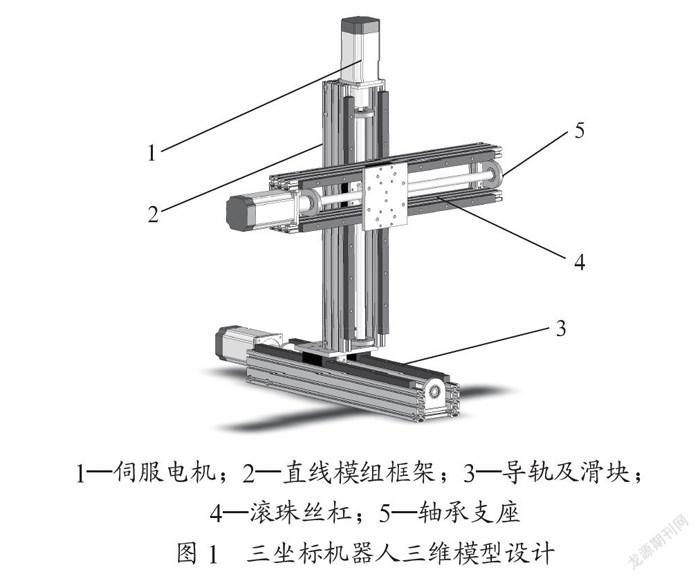
(2)装配体设计。任何产品都是由一系列的零件构成的,这些零件组合装配在一起构成了完整的且具有特定功能的产品,形成一个完整的三维机械模型。SolidWorks具有装配功能,将每个件添加到装配体中,通过零件配合关系,使各零件组合成一个完整体。下面是以三坐标机器人的装配设计为例,采用标准配合进行整体设计和虚拟装配,其上零部件包括伺服电机、滚珠丝杠、直线导轨及滑块、直线模组框架及各种支撑架等组成。如图1所示。
1.2 电气建模
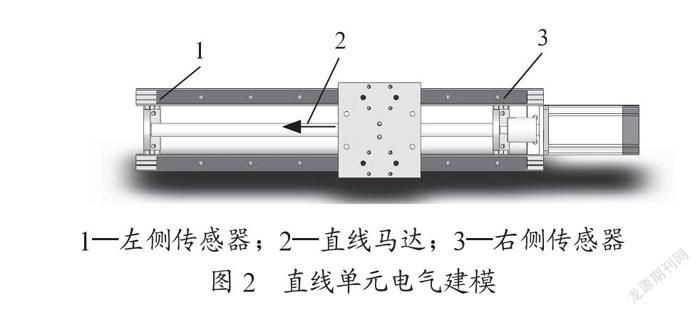
本仿真研究需要在SolidWorks模型中添加电机和传感器电机特性。以三坐标机器人一直线单元为例,创建模型电气特征。首先创建直线电机,本案例电机旋转带动丝杠转动,实现滑块的直线运动,所以创建的电机为直线电机,移动距离200 mm,时间5 s。然后在SolidWorks下创建两个测量传感器,左侧传感器尺寸1测量距离21 mm,右侧传感器尺寸3测量距离20 mm,如图2所示。
2 LabVIEW与SolidWorks模型关联
2.1 LabVIEW项目与SolidWorks装配体连接
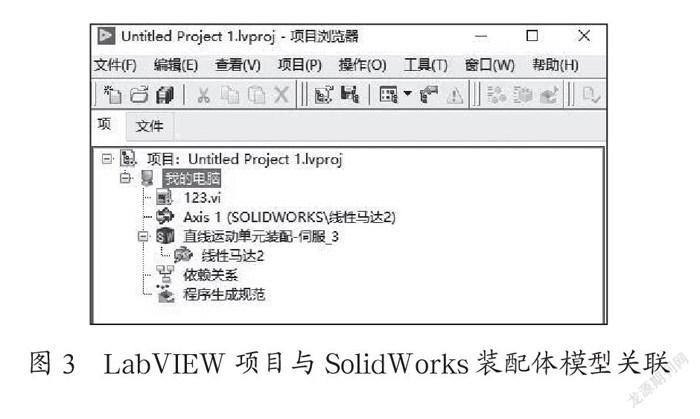
以三坐标机器人一轴直线单元为例,打开三维装配体模型,然后在LabVIEW创建一个SolidWorks Assembly项目,利用NI SoftMotion模块功能,软件可以自动检测到三维装配体模型,最后点击确定即完成LabVIEW项目与SolidWorks装配体关联,如图3所示,为创建的LabVIEW项目。
2.2 NI SoftMotion与SolidWorks模型马达连接
前文我们在三维模型中创建了电气特性,这时需要通过SoftMotion模块对SolidWorks装配体马达特性进行映射,并进行参数配置,然后通过SoftMotion的函数中Straight-line Move函数进行运动马达程序的编写。SoftMotion模块可以将运动命令转化成驱动命令,驱动SolidWorks中的马达运动。方法步骤如下:点击右键,新建NI SoftMotion Axis,选择Add New Axis,此时软件会自动识别在三维模型创建的马达,然后选择相应的马达,这样就创建一个轴。如图4所示。
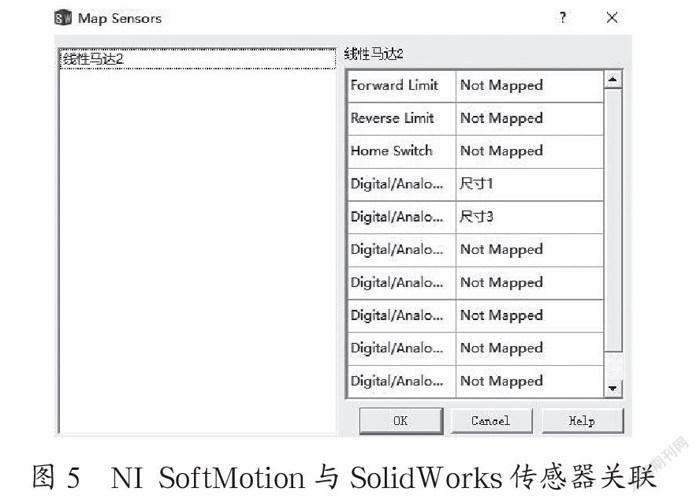
2.3 映射传感器
在完成LabVIEW项目与SolidWorks装配体关联后,利用Map Sensors功能,指定传感器相应的电机,然后配置传感器数据线,从而关联到SolidWorks模型的传感器。如图5所示。
2.4 LabVIEW直线运动程序
在LabVIEW VI文件中编写程序。采用直线运动函数Straight-line Move,该函数共有四种运动模式,分别是绝对运动、相对运动、速度和相对捕捉[4],如图6所示。本研究采用Straight-line Move函数相对运动模式进行运动马达程序的编写该函数既可以驱动直线电机,也可以应用驱动旋转电机。
3 LabVIEW实现与PLC通信搭建
3.1 硬件通讯连接
本研究系统硬件包括:欧姆龙CP1H、PC机、串口通信线。PC与PLC采用232串口通信,又PC不支持串口,所以需要串口转USB通讯。其通讯连接线如图7所示。
3.2 VISA串口通信
VISA作为一个在仪器编程上使用的标准I/O应用程序接口(API),具有一系列标准I/O底层函数,用户使用起来特别方便,但是VISA自己不能进行仪器编程,但可以直接调用VISA函数[5]。VISA库主要由VISA配置串口函数、VISA写入函数、VISA读取函数、VISA串口字节数函数、VISA关闭等函數组成。如图8所示。
3.3 LabVIEW实现与PLC通信指令
采用欧姆龙CP1H系列的PLC作为控制器,用RS232型作为通讯,实现PLC与装载LabVIEW的计算机通讯连接,PLC通讯指令包括C-mode指令和FINS指令[6]。C-mode指的是主机连接通信命令。由上位机产生并且发送到PLC,FINS指的是信息服务通信命令,FINS指令能用于各种网络和串行通信。C-mode读写代码如表1所示。
4 PLC程序调试
4.1 PLC程序编写
本研究三坐标机器人一共有三个轴,需要对每一个伺服电机进行控制,以第一轴为例,编写PLC程序,包括传感器位置检测程序,伺服电机驱动正反转程序,PLC与LabVIEW通讯程序,伺服电机停止程序等等。如图9所示,为伺服电机驱动程序,其中PLC地址0.00为调试启动按钮,0.01为调试停止按钮,0.02和0.03分别为一轴的左右限位,其余两轴与其相似。。
4.2 LabVIEW运动程序编写
LabVIEW平台作为SolidWorks三维模型和PLC之间信息交互的桥梁,因此,LabVIEW程序完成主要功能有:
(1)读取PLC当前状态;
(2)读取直线单元运动限位传感器;
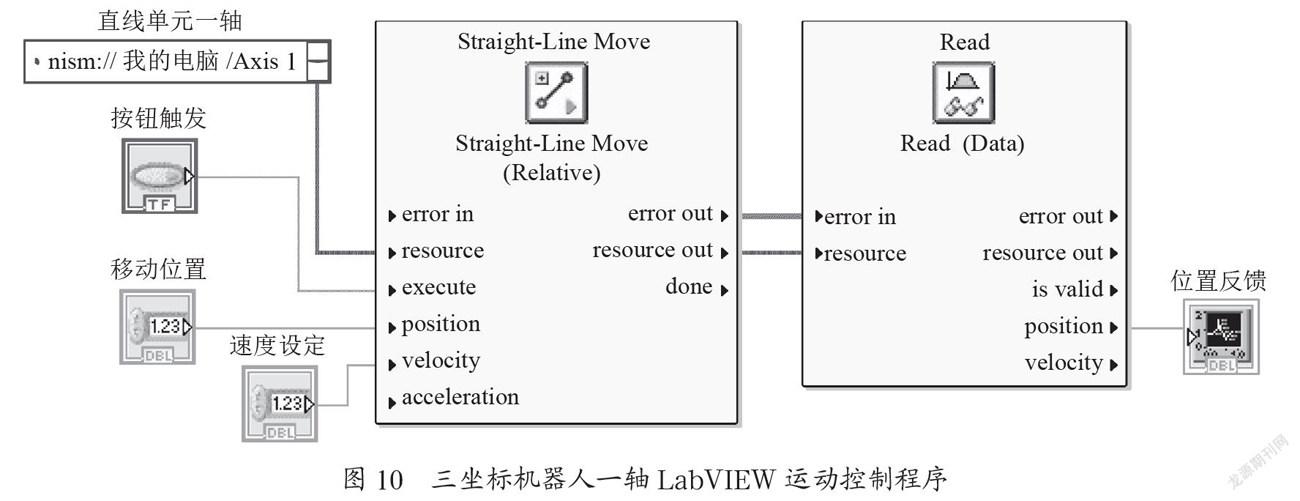
(3)接受PLC信息,利用Soft Motion模块控制SolidWorks模型运动,因此,编写其中一轴LabVIEW运动控制程序如图10所示,其他两轴与其相似,这里不做赘述。
5 结 论
本文通过LabVIEW软件来搭建PLC与虚拟模型的桥梁,从而实现PLC对虚拟模型的控制运动,完成相关程序的编写与调试,无须把设备实体加工制造出来。以直角坐标机器人为例,基于PLC与SolidWorks的三维模型虚拟仿真系统能够有效解决传统PLC的调试方法,对于教学来说可以节省设备的投入,对企业来说可以缩短产品的研法周期,节约开发成本。
参考文献:
[1] 武文佳.基于SolidWorks&LabVIEW的虚拟原型机电一体化设计技术研究 [D].西安:西安电子科技大学,2012.
[2] 张林艳.基于三维实体模型的PLC程序调试系统研究 [D].天津:河北工业大学,2015.
[3] 王延年,权建林.可编程控制器在真空吸盘式机械手中的应用 [J].西北纺织工学院学报,1995(2):179-183+186.
[4] 樊明亮,陈传好,唐民军,等.LabVIEW和NI OPC在C#程序控制PLC中的应用研究 [J].日用电器,2020(3):37-40.
[5] 姚兰,刘鹏.基于LabVIEW的太阳能数据采集软件系统 [J].仪表技术与传感器,2012(3):103-105.
[6] OMRON公司.OMRON Communications Commands Reference Manual [M].欧姆龙工业自动化公司出版,2010:2-3.
作者简介:张卫(1988.11—),男,汉族,河北唐山人,助教,硕士研究生,研究方向:机电一体化;王丽娜(1993.08—),女,汉族,山西长治人,助教,硕士研究生,研究方向:激光光束偏转控制技术研究、智能控制;班岚(1984.04—),女,回族,辽宁凌源人,副教授,硕士研究生,研究方向:光机电检测与控制;迟欢(1990.01—),女,汉族,黑龙江哈尔滨人,讲师,硕士研究生,研究方向:机械设计;张超(1989.03—),男,汉族,天津人,实验员,硕士研究生,研究方向:机械设计。
