基于点云数据的博闻楼三维模型构建
2022-07-09任心怡
崔 鹏,任心怡
(1.辽宁科技学院 资源与土木工程学院,辽宁 本溪 117004;2.沈阳市勘察测绘研究院有限公司,辽宁 沈阳 110057)
点云是物理世界三维数字化的代表性表达形式,是认知和理解物理世界的重要基础[1]。点云具有高冗余、高密度、非结构化等特点,如何将获取的海量点云数据转化成具有结构和功能的三维地理信息是数字校园、数字城市等研究的主要问题。文章应用FARO Focus 350三维激光扫描仪对博闻楼室内外进行点云数据采集,点云数据处理软件为TrimbleRealWorks,将处理后的点云数据导入Revit构建博闻楼三维模型,为数字化校园的建设提供一种思路和方法。
1 三维激光扫描技术原理
1.1 系统组成
地面三维激光扫描系统主要包括激光测距系统、激光扫描系统和CCD相机系统[2]。扫描头、控制器和计算机存储系统三者构成地面三维激光扫描仪。在三维激光扫描仪的控制器中,控制着距离测量和激光扫描,使其相互配合通过扫描头完成对目标物体的点云数据采集,最后将采集的点云数据储存在存储器中。
1.2 扫描原理
当对目标物体进行三维扫描时,激光发射器发射激光脉冲通过多面反射镜的转动,进而扫描整个目标物体实现对目标物体的激光扫描[3],如图1。
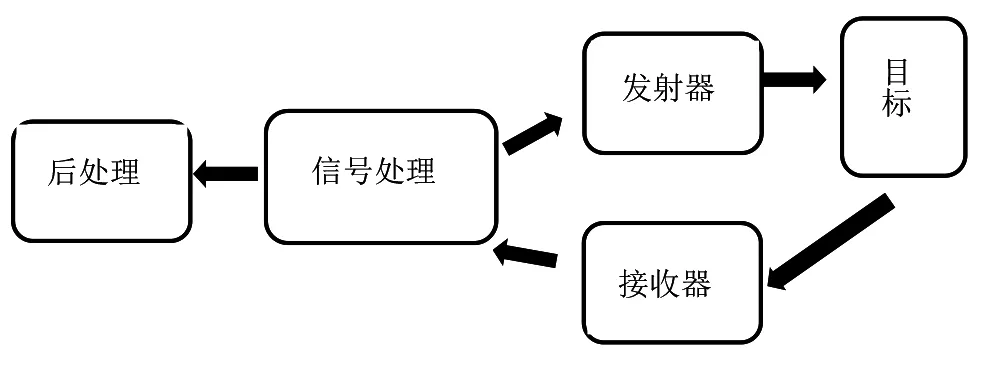
图1 扫描原理
1.3 仪器介绍
本次采用FARO Focus 350三维激光扫描仪,该扫描仪器具有尺寸小、重量轻、扫描距离远等特点。扫描距离350 m,内置HDR成像功能,可自定义设置扫描分辨率以便于适应任何场景的数据采集,扫描速度高达976 000点/秒。

图2 FARO Focus 350
2 点云数据的采集与处理
基于点云数据采用重叠度配准拼接方法,所以在外业扫描时为获得更好的点云效果与拼接精度,可以适当缩短扫描距离增大点云间的重叠度,重叠度保证在30%以上。
2.1 室外点云获取
从博闻楼西北角出发设为第1站,围绕博闻楼按顺时针方向逐步进行设站扫描,总共架设11站,如图3所示。
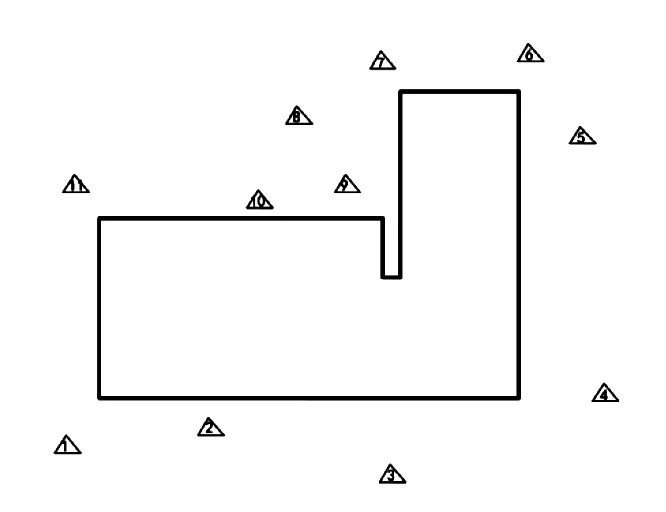
图3 室外扫描
2.2 室内点云获取
从博闻楼正门开始架站,逐层进行采集,总共架设60余站。

图4 大厅扫描
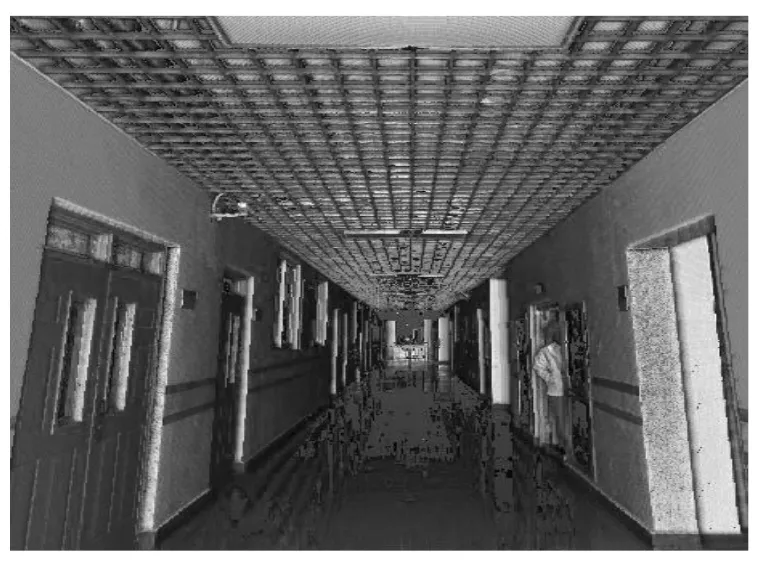
图5 走廊扫描
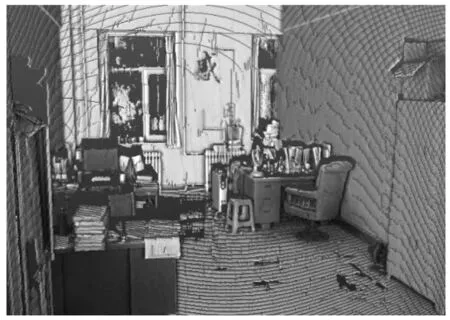
图6 房间扫描
2.3 点云数据的处理
2.3.1 配准拼接
将Focus 350导出的原始数据,格式为.fls,全部导入到TRW中,按步长为1提取每测站点云数据。在配准模块下,配准拼接相邻测站点云。拼接完成后可生成配准报告,查看每测站之间、整体点云之间的误差、重合度、可信度情况。
2.3.2 去噪与抽稀
在采集点云的过程中由于客观条件的影响,噪声的产生是不可避免的[4]。应用TRW中裁剪盒和点云编辑工具手动框选噪点进行剔除。
剔除噪点后的纯净点云冗余度过高,导入Revit进行建模时会导致数据的加载与处理时间过长。为了提高建模时的流畅度与工作效率,去噪后的纯净点云应进行适当的抽稀。
文中按步长为5进行点云抽稀,抽稀后导出.rtf格式的项目点云,通过ReCap转换为.rcp格式,最后将数据文件导入Revit软件中。
3 三维模型的构建
3.1 模型重建
Revit软件中的点云工具可直接实现对点云数据的可视化,并连接至BIM流程,方便模型制作[5]。在选择建筑菜单中选择墙构件,进行模型的构建。根据点云数据来确定墙体构件宽度和长度并进行拉取。门窗等的绘制应注意类型是否与实际相符,如找不到可选择相同类型的门窗,必须保证门窗洞口大小与点云数据所反映的大小相同。载入之后拉取好宽高后再布置到相应的墙的位置(如图7)。
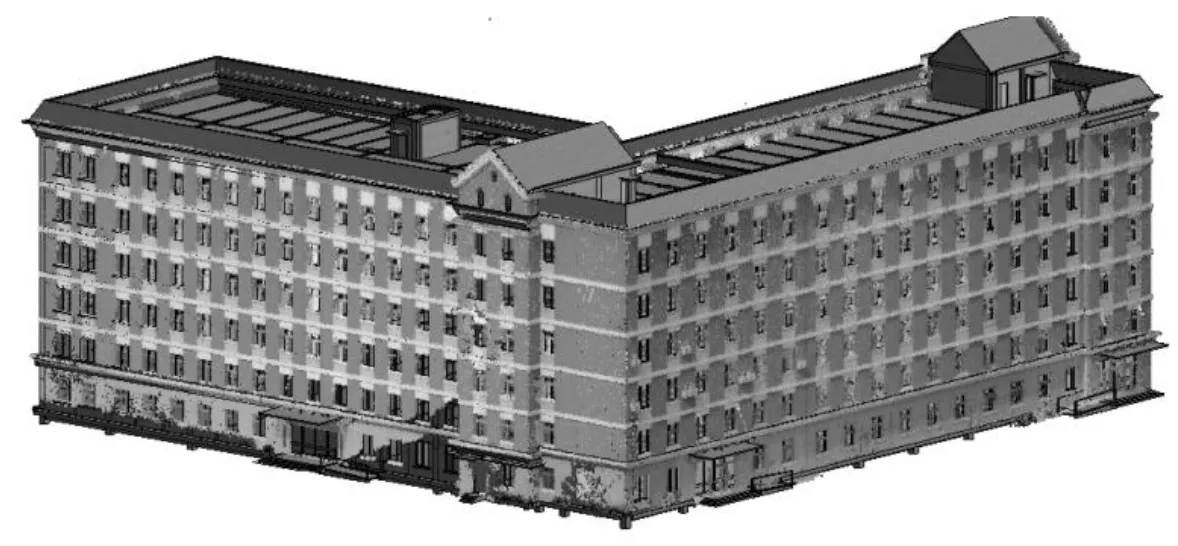
图7 博闻楼模型
3.2 纹理映射
为获得最好的纹理效果,应选用实际照片进行贴图。在贴图前使用Photoshop对数码像片进行简单处理,贴图后效果(如图8)。

图8 纹理贴图
4 结语
文章通过三维激光扫描获取点云数据,经过配准、去噪、抽稀等一系列点云处理,最后应用Revit建立博闻楼实景三维模型。通过实景三维模型的漫游、属性查询等功能全面地展示与体现博闻楼的概况与特点,为进一步实现数字化校园打下良好基础。