气动平衡移载机械手的设计与校核分析
2022-07-08刘晨敏
刘晨敏
(重庆财经学院物流工程学院, 重庆 401320)
引言
移载机械手作为一种智能辅助设备,具有结构简单、省时省力的特点,已广泛应用于现代工业的各个领域,如物料的转移、搬运、定位、装配等场合[1]。本文涉及的中大口径长轴类圆柱型产品,具有口径较大、长度较长、质量较重等特点,其在装配完成后的长度约为1.6 m,质量在50 kg 以上,如果全由人力来进行装卸和运输,则工人的劳动强度将非常大,同时劳动效率也比较低下。因此,本文针对产品特点设计了一种专用的气动平衡移载机械手,主要用于产品的装配、检测和包装过程的搬运,工人只需使用较小的推力或拉力就可以轻松实现产品的自由移载,采用的全气动控制系统也简化了设备的控制方式,便于人员操作。
1 机械结构设计
本文所述的气动平衡移载机械手包括机械部分和控制部分,机械部分包括机械臂及夹具,机械臂的旋转半径不小于3 m,垂直升降高度不小于1 m,夹具可满足质量50 kg 产品的自由移载。
1.1 机械臂设计
机械臂的机构简图如图1 所示,主要包括立柱、上臂、悬臂1、悬臂2 和扶手。立柱与上臂、悬臂1 与悬臂2、悬臂2 与扶手分别通过转动关节连接,所设置的3 个转动关节可保证机械臂在水平360°范围内夹取任意形态摆放的产品。上臂与悬臂1 通过移动关节连接,移动关节伸缩所提供的俯仰功能可使机械臂达到高度范围内的任一位置。
依据图1 机构简图,本文绘制的机械臂模型如图2 所示。移动关节由一根大口径的平衡气缸来驱动,通过气缸缸杆的伸出与缩回来实现垂直方向的俯仰动作。3 个转动关节由空压蝶式制动器来实现,自由状态下空压蝶式制动器充气处于制动状态,当需要旋转机械臂时,按下对应的开关按钮,空压蝶式制动器泄气解除制动,工人只需使用较小的力就可自由转动机械臂,到达预定位置后再松开按钮,机械臂保持制动状态不变。
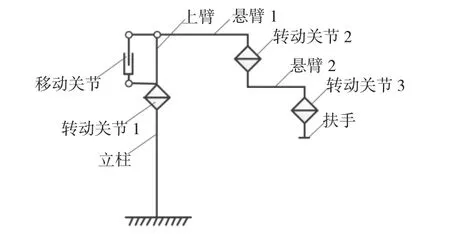
图1 机械臂机构简图

图2 机械臂模型
1.2 夹具设计
夹具的机构简图如下页图3 所示,依据双滑块机构的衍生型式[2-3],滑块1 为动力元件,滑块2-1、滑块2-2 为执行元件,在两根连杆的作用下,可保证滑块2-1、2-2 同步动作。依据此原理,本文设计的夹具模型如下页图4 所示。
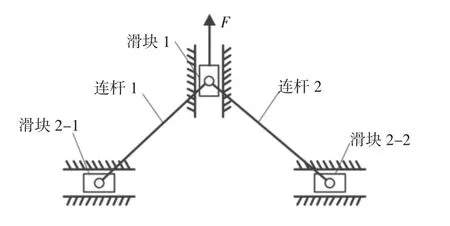
图3 夹具机构简图
由图4 可知,移动横杆在抱紧气缸驱动下做上下移动,实现滑块1 的功能,平移抱爪在卡槽限制下仅能实现平行移动,实现滑块2-1、滑块2-2 的功能,两连接块一端同时连接移动横杆,另一端分别连接两平移抱爪,实现连杆1、连杆2 的功能。本套夹具的工作过程是:抱紧气缸缸杆缩回,带动移动横杆向上移动,与之连接的连接块做平面运动,从而拉动平移抱爪相向平移闭合将产品抱紧;需要卸下产品时,抱紧气缸缸杆伸出,带动移动横杆下移,平移抱爪在连接块作用下背向平移张开,从而将产品放下。本文依据产品长度较长的特点,设计的夹具采用双抱爪,一前一后分别抱住产品的首部和尾部,以确保夹取的稳定性。

图4 夹具模型
综合上述机械臂及夹具的设计,本文绘制的气动平衡移载机械手模型如图5 所示,将立柱固定于地面上,该机械手可实现旋转、起降产品的功能,并可在任意位置实现制动悬停,整个过程操作轻便、转动自如。

图5 气动平衡移载机械手模型
2 气控系统设计
移载机械手气控系统工作原理如图6 所示,其载荷平衡可分为空载平衡和负载平衡两种类型。空载平衡的控制原理为[4]:当抱紧气缸空载时,高压空气经由调压过滤器,一路通向空载调压阀,调压后经梭阀控制精密调压阀的输出压力。梭阀是逻辑或门,其输出总是取输入的最大值。适当调节空载调压阀的输出,使得精密调压阀输出的气压控制平衡气缸达到空载平衡。负载平衡的控制原理为[4]:当抱紧气缸负载时,拨动载荷转换开关,负载调压阀回路贯通,使得高压空气调压后进入梭阀,当负载调压阀输出到梭阀的压力大于空载调压阀输出到梭阀的压力时,梭阀输出为负载调压阀所确定的压力,这个压力控制精密调压阀,进而控制平衡气缸达到负载平衡。

图6 气控系统原理
移载机械手夹取产品的工作过程为:气控系统回路处于空载平衡状态,拉动机械手到预夹取位置,按下闭合按钮,抱紧气缸控制阀通气,抱紧气缸在高压空气作用下使得夹具闭合,夹具夹住产品,然后拨动载荷转换开关,气控系统回路处于负载平衡状态,拉动机械手到卸货位置,按下张开按钮,抱紧气缸缸杆伸出,夹具张开卸下产品。机械手向下移动时,平衡气缸内压力倍增,空气由精密调压阀溢流口排入大气中,维持气缸压力不变。当向上抬起机械手时,平衡气缸压力下降,精密调压阀恒压输出补偿,同样维持缸内压力不变,从而达到平衡气缸的助力、省力功能。安全控制阀这一支路起安全保护作用,当气源突然停气,安全控制阀支路不再贯通,平衡气缸控制阀动作,使得平衡气缸气路阻断,进而维持气缸压力不变,保证产品缓慢回落。
3 校核分析
3.1 机械臂校核
本文设计的气动平衡移载机械手旋转半径不小于3 m,可以起吊质量不低于50 kg 的产品。设计时所选用的平衡气缸缸径为D=200 mm,杆径d=40 mm,气源压力P=0.6 MPa,气缸上端进气,下端排气,机械臂及平衡气缸的受力如下页图7 所示[5]。

图7 机械臂及平衡气缸受力图
对机械臂进行受力分析有:
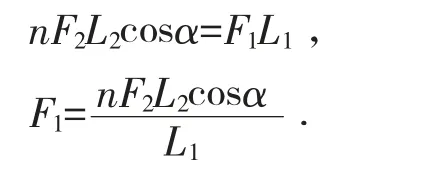
设计时取L1=0.5 m,L2=3 m,安全系数n=3,α=90°,则有:F2=509.8=490N,F1==8820 N。
比较可知,F>F1,则选用的平衡气缸能提起产品,满足设计要求。
3.2 夹具校核
本文依据产品特点采用的是双夹具,单套夹具施加的力为抱紧气缸输出力的一半。设计时选用的抱紧气缸缸径为D=80 mm,杆径d=25 mm,气源压力P=0.6 MPa。抱紧气缸及单套夹具的受力如图8 所示。其中,抱紧气缸的输出力为:F=PS=×0.082=3014.4 N。
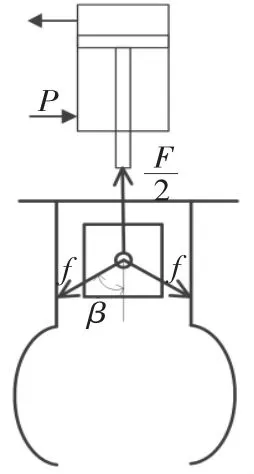
图8 抱紧气缸及单套夹具受力图
对该夹具进行受力平衡分析有:

式中:β 为抱紧气缸输出力方向与抱爪受力方向的夹角,40°≤β≤70°;安全系数n=1.5。
抱爪的受力如图9 所示,针对单边的抱爪进行水平方向的受力分析可知:

图9 抱爪受力图
其中:
联立求解有:

对产品进行受力平衡分析可知:
代入求解有:

抱爪闭合夹紧产品时,β=40°。本文设计的抱爪为兜爪,兜取产品时兜爪的有效支撑夹角40°≤θ≤90°,则有:
本套夹具可以提起的产品质量为(745÷9.8)76 kg>50 kg,满足起吊产品的要求。
4 结语
针对中大口径长轴类圆柱型产品的移载问题,本文提出了一种气动平衡移载机械手,并对其机械臂及夹具进行了详细设计,同时绘制了气控系统的工作原理图,分析了其空载平衡与负载平衡的控制原理,最后对机械臂及夹具的受力进行了校核分析,经计算所选用的平衡气缸能满足旋转半径3 m,垂直升降高度1 m 的工作要求,设计的夹具也满足重量50 kg 以内的产品的自由移载。
