下肢康复机器人研究现状
2022-07-07杜妍辰张鑫喻洪流
杜妍辰,张鑫,喻洪流
1.上海理工大学 康复工程与技术研究所(上海,200093)
2. 上海康复器械工程技术研究中心(上海,200093)
3. 民政部神经功能信息与康复工程重点实验室(上海,200093)
0 引言
近年来,人口结构已成为全世界共同面对的一个问题,其中人口结构老龄化给很多发达国家的发展均带来了不少难题。第七次全国人口普查结果显示[1],我国人口老龄化程度在进一步加深,并将在未来很长一段时间持续面临人口均衡发展的压力,这意味着我国未来的医疗环境将面临不小的压力,老年人的健康问题也将逐步成为当前社会关注的重点问题。而由于衰老和疾病导致的下肢功能损伤,也使近年来下肢功能障碍的患者数量不断攀升。大多数患者的下肢功能障碍可能来源于脑卒中继发症、脊髓损伤、骨损伤等[2,3]。
临床实践经验已经证实,通过康复措施对下肢功能障碍患者进行的康复治疗,能够明显改善患者病情[4]。由于人体大脑具备可塑性,准确、及时地康复训练能够帮助患者进行神经重组与代偿,从而大大提高生存率和恢复运动机能的几率[5]。
机器人技术于二十世纪六十年代开始在康复产业应用,到九十年代康复机器人的研究开始全面地发展[6]。由于下肢行走能力是人类日常生活中的基本要求,下肢康复机器人研究理所当然地成为国内外康复研究的重点和热点[7]。利用机器人辅助进行的康复治疗可以大大改善人工治疗的弊端,在降低治疗保健成本的同时,也保证了康复训练的疗效[8]。
1 下肢康复机器人分类
目前,国内外陆续设计了多款应用于下肢康复的机器人,机器人的形态和训练方式是多种多样的。根据患者不同的训练姿态,可分为站立式、多体式与坐卧式。而根据其训练原理又可分为外骨骼式与末端牵引式。我们将下肢康复机器人进行了分类,如图1 所示。

图1 下肢康复机器人分类Fig.1 Classification of lower limb rehabilitation robots
2 站立式下肢康复机器人
站立式下肢康复机器人是协助患者在站立或行走状态下进行康复训练的机器人,有悬挂式与穿戴式两种类型[9]。
2.1 悬挂式下肢康复机器人
下肢功能障碍患者与正常人相比,通常表现为肌肉力量不足、关节活动度较小、神经系统控制能力较弱等方面,很难通过自身完成正常站立与行走的动作[10]。对于下肢无法支撑身体重量的患者,悬挂系统能够有效地将患者的下肢负载降低,同时可防止跌倒等意外情况的发生,保证训练过程的安全性。
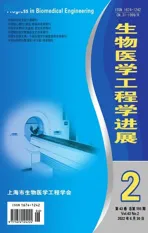
最早应用于临床的悬挂式下肢康复机器人是由 瑞 士Hocoma 公 司 研 发 的Lokomat[11],它 也是第一台基于跑步机的外骨骼式下肢步态矫正驱动装置。另一种悬挂式下肢康复机器人是基于脚踏板的末端执行器式结构,最早的样机是由德国柏林自由大学研制的Gait Trainer 下肢康复机器人(GT),该机器人结构较简单,步态训练多样性受限[12]。在此基础上,进一步研制开发的Haptic Walker 康复机器人通过控制机械臂末端的两个脚踏板的位置来完成相应的康复训练动作。图2 显示了三种悬挂式机器人。
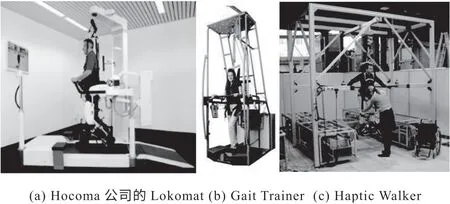
图2 下肢康复机器人分类Fig.2 Classification of lower limb rehabilitation robots
2.2 穿戴式下肢康复机器人
穿戴式下肢康复机器人属于穿戴式下肢外骨骼,最初的开发是出于军事目的,之后逐步应用到了医疗康复领域。具有代表性是以色列的ReWalk外骨骼,可为髋关节和膝关节的运动提供动力,通过覆盖的传感器检测到重心的前移量,结果反馈到控制系统,以模拟人体的正常步态[13]。日本筑波大学推出的HAL 系列全身外骨骼助力机器人是当今市场上唯一利用表面肌电信号的下肢外骨骼[14]。其余同类产品还有新西兰研发的REX,美国伯克利公司研制的Elegs 等[15],为各类外骨骼机器人如图3 所示。
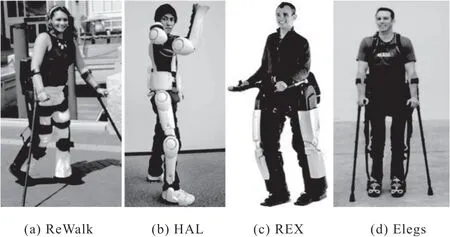
图3 站立式外骨骼机器人Fig.3 Standing exoskeleton robot
国内的外骨骼机器人产品如图4 所示,有深圳迈步研发的Bear H1、上海傅里叶研发的Fourier X1、北京大艾机器人科技有限公司研发的Ailegs机器人等[16]。

图4 国产外骨骼机器人Fig.4 Domestic exoskeleton robot
3 多体式下肢康复机器人
多体式下肢康复机器人采用站立式下肢康复机器人与站立床结合的康复策略,实现患者在不同倾斜平台的步态训练[17]。
瑞士的Hocoma 公司研制了的一款机器人Erigo[18],可应用于脊椎损伤和脑损伤患者早期的康复训练,患者在康复训练过程中,被安全绑带保持在床体上,床体的倾斜角度可实时调节,电机通过驱动连杆机构带动髋关节的屈伸,在患者起立的同时足底踏板进行踏步运动,达到了既能减少痉挛还可以提高患者心血管稳定的效果。国内有上海西贝电子科技公司研发的Remo 下肢评估训练康复系统等类似多体式下肢康复机器人,均是通过足底踏板进行末端驱动的机器人。
上海璟和技创公司研制的智能化多体位下肢康复机器人Flexbot 是多体式与外骨骼机器人的结合,能够实现多体位的步态训练。利用虚拟现实和多传感器系统,利用实时反馈的不同程度患者信息,安排合适的康复训练模式,对于重塑患者神经系统和步态再学习有着显著的疗效[19]。
图5 国产外骨骼机器人Fig.5 Domestic exoskeleton robot
4 坐卧式下肢康复机器人
坐卧式下肢康复机器人通常采用坐姿或卧姿进行康复训练,多用来应对康复初期患者肌力不足情况下的康复训练,同样分为末端式与外骨骼式。
对于末端式机器人,一类是通过滑块机构带动足部运动进行康复训练的产品,如瑞士REHA公司研发的First Mover 下肢康复机器人,可以利用滑块摇杆机构带动下肢做规律性的屈伸运动[20]。另一类是通过机械臂控制人体下肢末端进行各类训练的产品,如YASKAWA 的LR2 机器人,可带动下肢进行三关节单侧多模式屈伸训练,类似产品还有KUKA 公司研发的LBR MED 机器人,它是工业机器人LBR 在康复领域的一种应用,延续了工业机器人的精准控制,能够协调下肢进行多自由度的训练,工作空间较大[21]。另一类是通过类似脚蹬车的圆周运动进行康复训练的产品,代表性的产品有RECK 公司研发的用于床旁的MOTOmedletto2康复训练器[22]和坐姿使用的MOTOmedviva。图6为各类末端坐卧式下肢康复机器人。

图6 末端坐卧式机器人Fig.6 End-side sitting and horizontal robot
大多数末端坐卧式下肢康复机器人训练方式过于单一,近年来多自由度的外骨骼坐卧式下肢康复机器人也逐渐成为研究关注的热点。目前已经投入临床应用的是瑞士SWORTEC 公司研发推广的Motion Maker 坐卧式下肢康复机器人[23],通过采用外骨骼式的机械腿结构带动患者进行康复训练,同时配合仰角可调的座椅机构实现坐姿与卧姿下的训练,临床数据表明效果良好、舒适安全。国内最接近临床的同类产品是由燕山大学研发的下肢康复机器人LRR-Ro,同样能够实现患者在坐卧姿态下的髋、膝、踝协调训练[24]。图7为外骨骼坐卧式下肢康复机器人。

图7 外骨骼坐卧式下肢康复机器人Fig.7 Exoskeleton sitting and horizontal lower limb rehabilitation robot
5 总结与展望
目前,站立式下肢康复机器人的研究较为成熟,主要适用于患者后期的康复训练,其中悬挂式系统能够减重并辅助患者进行下肢步态训练,但由于悬吊带需要和人体绑缚并承担身体重量,容易造成挤压伤害。穿戴式康复机器人基本要求患者具有一定程度的站立能力,而使很多早中期患者肌肉力量不足,使用受到限制。
多体式下肢康复机器人主要适用于中期下肢康复训练,将下肢训练与站立床相结合,实现了患者由躺姿到站姿的过渡,由于早期患者的肌力不足,同样需要较高的安全保障。
坐卧式下肢康复机器人可适用于早期患者的康复,其中末端式机器人结构相对简单、易于操作、成本较低,但同时存在功能较单一、训练关节自由度较少、缺乏智能化控制等缺点。外骨骼坐卧式下肢康复机器人的智能化程度往往较高,可实现多关节联合训练,并可根据患者情况进行训练轨迹自定义规划,易于实现个性化康复方案的制定,但缺点是结构较复杂,研发成本与难度均相对较高。
随着机器人技术的不断进步和发展,机器人技术的运用必将成为未来康复产业发展的重要一环,社会的需求不断扩大、国家政策的扶持都将大大推动康复机器人产业的发展。未来,康复机器人将会以低成本、高效率、智能化与多功能化的方向继续推进,同时,智能人机交互、个性化诊疗、虚拟现实、脑机触觉接口等技术的应用也将成为康复机器人发展的新兴热点,开发智能化的商用康复机器人必然会带动我国康复产业发展实现质的飞跃。