一种结合健侧小腿步态信息的膝关节假肢控制方法
2022-07-07陈长龙汪晓铭张哲文黎林荣孙洁孟巧玲喻洪流郑宏宇
陈长龙,汪晓铭,张哲文,黎林荣,孙洁,孟巧玲,喻洪流,郑宏宇
1. 上海理工大学 康复工程与技术研究所(上海, 200093)
2. 上海康复器械工程技术研究中心(上海, 200093)
3. 民政部神经功能信息与康复工程重点实验室(上海, 200093)
0 引言
根据第二次全国残疾人抽样调查统计,2010 年末我国肢体残疾患者约为2 472 万人,其中下肢截肢患者约为220 万人[1]。膝上截肢患者部分或者完全失去了下肢功能,膝关节假肢是解决膝上截肢患者行动障碍的重要辅具,可以替代膝关节的功能,根据截肢患者的运动意图实现相应的运动[2]。
现有假肢的人体运动意图识别更多的基于残肢侧,较少关注健侧腿。基于现有技术,通常采集残肢侧肌电信号、机械信号(角度、角速度、角加速度)、生物力学信号(足底压力、人机交互力)进行人体运动意图识别。肌电信号比较直接地反映人体运动意图,信号延时小,但是截肢患者残肢肌肉缺失和萎缩会影响信号质量,而且测量肌电信号的金属电极会压迫截肢患者肌肉,带来皮肤损伤[3]。肌电信号在下肢上的应用目前暂时停留在实验室阶段。机械信号和生物力学信号由于对截肢患者的运动干涉较少,应用比较广泛。但是基于残肢侧机械信号和生物力学信号进行运动控制容易受到外界因素干扰,如更换不同的鞋子,无法最大程度满足不同患者的个性化需求。
健全人的下肢运动具有对称性和周期性,两侧下肢相差半个步态周期[4],因此利用双下肢步态重建一侧步态是可行的。膝关节假肢可以提前半个步态周期获取健侧腿步态信息,同时排除外界干扰,控制更加安全。实时获取健侧腿步态信息并在线优化膝关节假肢的控制参数,可以最大程度满足不同截肢患者的个性化需求。因此,本研究提出一种结合健侧小腿步态信息的膝关节假肢平地行走控制方法,结合健侧小腿角度信号,残肢侧大腿、假肢小腿角度信号、假肢小腿处的轴向力信号进行人体运动意图识别,实时获取健侧腿步态信息,包括步速、摆动速度、最大摆动屈曲角度和摆动伸展最大角度等,控制膝关节假肢跟随健侧腿步态最大移位轨迹。
1 控制系统设计
1.1 控制系统硬件设计
本研究使用的膝关节假肢是一种主被动混合驱动的智能膝关节假肢,主要由四连杆机构、主动力矩输出单元、阻尼力矩输出单元及控制系统组成。四连杆机构能够较为真实地逼近人体膝关节转动瞬心( 小腿相对大腿转动时的速度瞬心,简称转动瞬心) 的J 形轨迹,具有良好的仿生特性[5]。阻尼力矩输出单元采用新型扇形阀式流量调节机构,实现单个电机对屈曲和伸展阻尼的独立连续调节[6]。主动力矩输出单元采用220 W 的直流无刷电机作为动力源,输出主动力矩控制膝关节假肢主动伸展,反向旋转实现主- 被动力矩快速解耦。
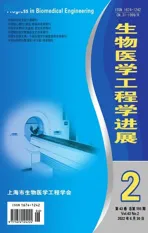
控制系统硬件连接如图1 所示。分别在膝关节假肢四连杆机构上端和假肢本体上放置惯性传感器采集残肢侧大腿、假肢小腿的角度信号。

图1 控制系统硬件连接图Fig.1 Hardware connection diagram of control system
在假肢腿管处放置压力传感器,采集假肢小腿处轴向力(地面反作用力)信号。考虑到截肢患者的接受程度,采用一个惯性传感器采集健侧小腿处的角度信号,并使用低功耗蓝牙进行无线数据传输,减少对截肢患者的运动干扰。Stm32 主控制器根据多传感数据进行路况和步态相位识别,使用有限状态控制进行运动控制,基于CANopen通信协议向运动控制模块发送控制指令。运动控制模块接收到力矩信号控制Maxon 驱动器使主动电机输出期望力矩,接收到位置信号控制被动电机控制器使被动电机输出期望旋转角度。Stm32 主控制器根据实时获取的健侧腿步态信息,不断优化控制参数,并更新控制参数库,控制参数库基于EEPROM 存储器搭建,断电后内部数据不会丢失。Stm32 主控制器实时检测电源模块电量,电量过低时自动报警。
1.2 控制系统软件设计
控制系统工作流程如图2 所示。系统上电后,首先进行初始化,各模块进行自检,确保整个系统的稳定运行,进行电机回零和膝关节假肢姿态校准。
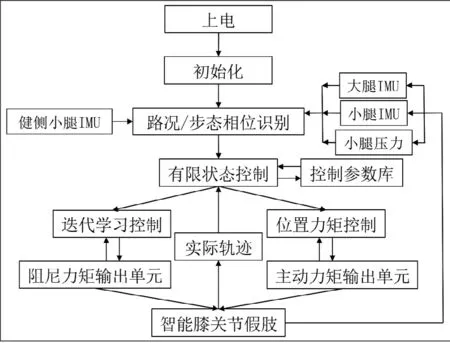
图2 膝关节假肢控制系统工作流程Fig.2 Control system work flow of knee Prosthesis
根据多传感信号进行路况、步态相位识别。由于两侧下肢相差半个步态周期,膝关节假肢处于摆动相时,健侧腿处于站立相,根据健侧腿站立相时间换算步速,可提前半个步态周期获得步速,排除膝关节假肢与地面相互作用产生的干扰。膝关节假肢处于站立相时,健侧腿处于摆动相,提前获取健侧腿摆动相的摆动速度、摆动屈曲最大角度、摆动伸展最大角度。使用有限状态控制,根据识别出的不同路况、不同步态相位结合健侧腿步态信息设置控制参数,跟踪健侧腿步态轨迹。需要主动力矩时,使用位置力矩控制方法控制主动力矩输出单元输出期望力矩,膝关节假肢主动伸展,依据反馈的实际运行轨迹修正控制参数,更新控制参数库。需要阻尼力矩时,使用迭代学习算法控制阻尼力矩输出单元,输出期望阻尼力矩,依据反馈的实际运行轨迹进行迭代学习,在线修正控制参数,更新控制参数库。
2 结合健侧腿步态信息的有限状态控制
根据健全人行走时的步态特征,将步态周期划分为7 个步态相位,每个步态相位是有限状态控制中的一个状态,使用有限状态控制分别在每个状态设置控制参数。双腿站立状态是有限状态控制的起始和终止状态,可以在中间状态切换到双腿站立状态,然后退出有限状态控制。有限状态控制流程如图3 所示。
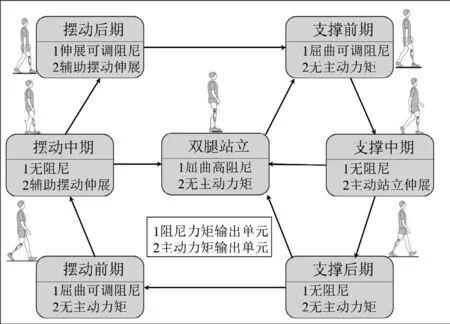
图3 有限状态控制流程Fig.3 Finite state control flow
检测到双腿脚全掌着地时,切换双腿站立状态,输出屈曲高阻尼,保证膝关节假肢站立的稳定性。检测到假肢脚跟着地时,切换支撑前期状态,在此时获取健侧小腿步态信息换算步速,基于步速输出可调屈曲阻尼,吸收地面冲击,为保证截肢患者安全及站立稳定性,站立屈曲角度不大于15°。检测到假肢脚全掌着地时,切换支撑中期状态,输出主动力矩,膝关节站立伸展。检测到假肢脚后跟离地时,切换支撑后期状态,利用大腿残肢和膝关节假肢之间的惯性耦合,带动膝关节假肢屈曲。检测到假肢脚尖离地时,切换摆动初期状态,在此时获取健侧小腿摆动相的步态信息,包括摆动速度、摆动屈曲最大角度、摆动伸展最大角度等,基于健侧小腿步态信息,输出屈曲可调阻尼,控制膝关节假肢和健侧小腿的摆动屈曲最大角度误差不超过2°。检测到假肢摆动屈曲到最大角度时,切换摆动中期状态,利用惯性耦合带动膝关节假肢伸展,确保假肢小腿垂直地面时,不会拖地,同时输出主动力矩辅助伸展,防止外界因素干扰膝关节假肢的摆动伸展而摔倒。检测到假肢小腿伸展到身体前方时,切换摆动末期状态,根据健侧小腿步态信息,输出伸展可调阻尼,吸收摆动冲击,输出主动力矩辅助伸展,防止截肢患者被绊倒,膝关节假肢摆动伸展到最大角度时,输出屈曲高阻尼,为进入下一步态支撑前期状态做准备。
3 实验测试与分析
考虑到安全问题,本研究通过健康受试者穿戴特制假肢,接受腔模拟截肢者进行实验测试,受试者在参与该实验前签署了实验知情同意书。受试者被要求穿戴膝关节假肢,分别以1.5、2.5、3.5 km/h的步速在跑步机上行走1 min,共进行5 次测试,每次测试间隔2 min。使用美国Noraxon 运动分析系统采集膝关节角度数据,采样频率200 Hz,假肢穿戴测试实验及结果如图4 所示。
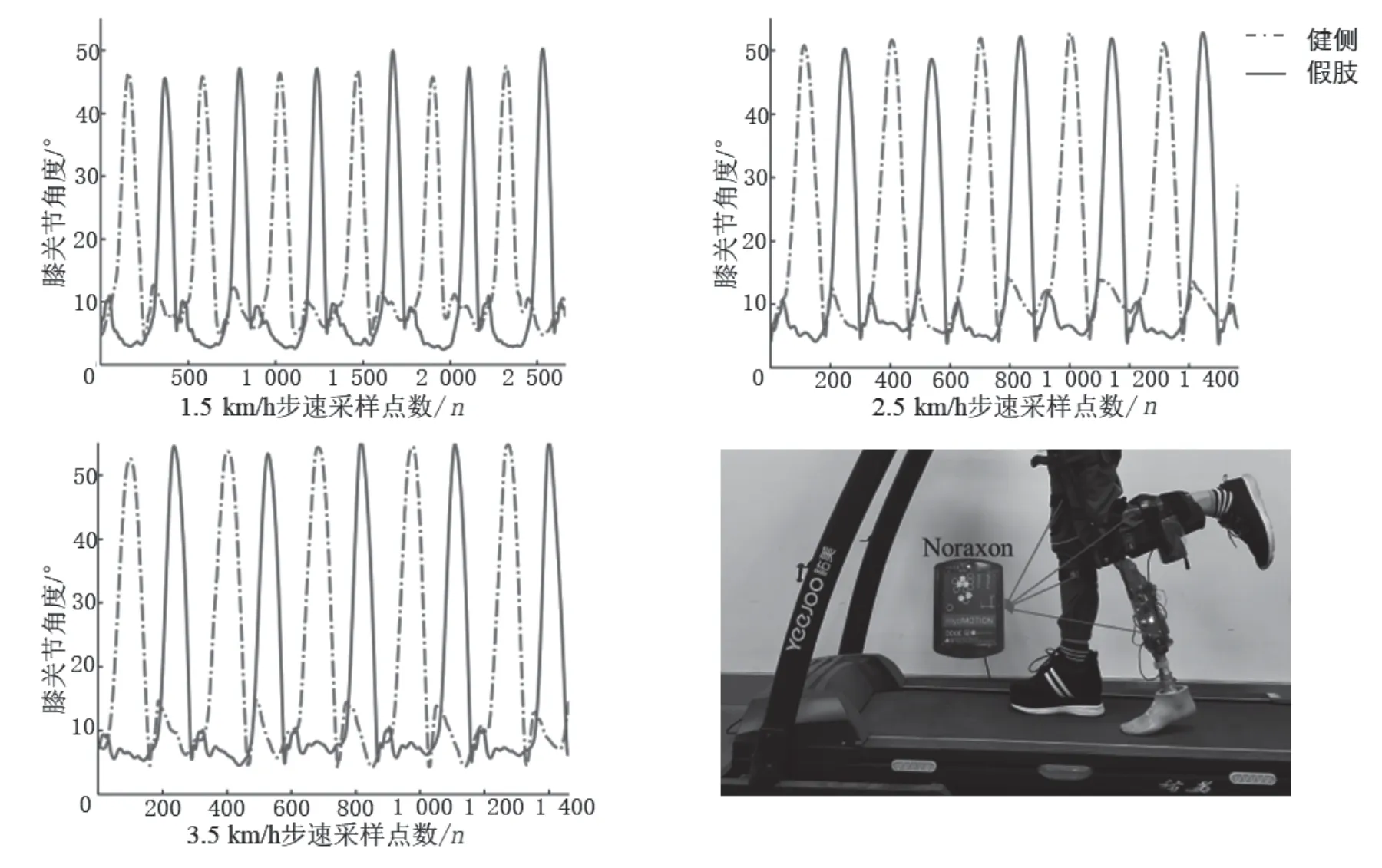
图4 假肢穿戴测试实验及结果Fig.4 Experiments and results of prosthetic wearing test
由图4 可知,在3 种步速下,膝关节假肢与对应步速下健侧腿摆动屈曲最大角度和摆动伸展最大角度误差均小于最大允许误差2°,膝关节假肢很好地跟随了健侧腿的步态轨迹。同时,站立屈曲最大角度在10°~15° 范围内变化,保证了站立相的稳定性。符合控制系统的控制要求,证明了所设计的结合健侧小腿步态信息的膝关节假肢控制方法的有效性和可行性。
4 结语
本研究提出一种结合健侧小腿步态信息的膝关节假肢控制方法。本方法基于健侧小腿步态信息使用有限状态控制,控制膝关节假肢跟随健侧小腿步态轨迹,因此可以避免更换鞋子等外部因素改变对膝关节假肢控制系统造成的干扰,最大程度地满足不同患者的个性化需求。平地行走实验结果证明,所提控制方法是有效的和可行的。目前,采用此控制方法的膝关节假肢行走时尚不够灵敏,仍需要优化意图识别算法,提高步态相位识别的响应速度。