介电型电活性聚合物圆柱形驱动器侧向特性的研究
2022-07-07王勇郭晶
王勇,郭晶
(1.航空工业北京长城计量测试技术研究所,北京 100095;2.中国运载火箭技术研究院,北京 100076)
0 引言
近年来,随着智能材料的发展,其应用领域更加广泛。电活性聚合物作为智能材料里的一员,因其电致动性,在智能材料领域具有重要的研究价值和应用价值。介电型EAP 圆柱形驱动器作为电活性聚合物的典型应用之一,需要深入的进行研究,探究不同因素对介电型EAP 圆柱形驱动器输出的侧向性能的影响。
介电弹性体作为超弹性绝缘材料,当在高压电场作用下,内部会产生静电压力,使面积增大,厚度减小,发生显著的形状和体积变化;当电场撤销后,可以恢复到初始形状和体积,从而完成了电能到机械能的转化。介电弹性体具有轻质化、响应速度快、高能量密度比、低噪声、变形大、灵活性好等优点,因而介电弹性体材料也被人称为“人工肌肉”[1-2]。由于其独特性能,介电弹性体材料在航空领域、能源领域、仿生机器人领域等具有重要科研和应用价值。目前,常用的介电弹性体有硅橡胶、丙烯酸等,对于丙烯酸类介电弹性体常用的产品是美国3M 公司生产的VHB4910,该材料的应变变形可达380%,适用温度-10~90 ℃,在1 kV 以上的激励电压作用下可发生变形[3-5]。由于介电弹性体材料具有的独特性能,引起了国内外众多科研人员的重视和研究,在此基础上,制作了众多类型的介电型EAP 驱动器,在介电型EAP 驱动器的驱动形式、结构设计、输出性能上作了众多创新,取得了许多显著成果。
目前,常见的介电型EAP 驱动器有圆柱形、圆桶形、锥形、平面形、堆叠形、菱形等。介电型EAP 圆柱形驱动器因其结构形式简单,制作方便,输出性能好,得到了广泛的应用。美国斯坦福大学利用介电型EAP 圆柱形驱动器设计制作了仿生爬行机器人[6]。韩国成均馆大学利用介电型EAP 圆柱形驱动器设计制作了一个手爪形机器人,该机器手爪上每个手指关节可以独立发生15°~30°的转角[7-8]。南京航空航天大学的科研小组利用介电弹性体材料,利用介电型EAP 圆柱形驱动器设计制作了转到机械手等[9]。目前,对于介电型EAP 圆柱形驱动器侧向输出性能的实际应用较多,而对其输出性能的影响因素的研究较少,并且介电型EAP 圆柱形驱动器在实际应用中具有广泛的前景,因此具有重要的研究价值。
本文通过试验测量、数据处理分析,对影响介电型EAP 圆柱形驱动器输出的侧向偏转力和侧向弯曲角度的因素进行深入探究,并进一步总结其作用规律,为后续介电型EAP 圆柱形驱动器的设计制作以及实际应用打下基础。
1 理论模型
为了便于对介电型EAP 圆柱形驱动器进行分析,突出主要因素,忽略次要因素,做了下列假设[10]:①介电型EAP 膜在拉伸后,EAP 膜的厚度均匀,不存在应力集中现象;②介电型EAP 膜卷绕完成后,在制成的圆柱形结构中,各层介电型EAP 膜的厚度均匀,忽略掉各层介电型EAP 膜之间相互作用的内部压力;③圆柱形驱动器在激励电压作用下,介电型EAP 膜发生形变,此时各层的介电型EAP 膜都发生均匀的变形,且各层介电型EAP 膜之间不发生相对运动;④圆柱形驱动器卷绕的介电型EAP 膜上都涂抹有均匀的柔性电极,为了简化模型,忽略掉柔性电极的厚度;⑤圆柱形驱动器上每层介电型EAP 膜都是同心圆;⑥制成后圆柱形驱动器,可以保持结果稳定,弹簧不会发生失稳现象,即弹簧不会在径向上发生变形。
介电型EAP 材料的变形原理:介电型EAP 材料类似平行板电容器,如图1所示,介电型EAP材料此时处于断电状态,在介电型EAP 材料上下表面均匀涂抹柔性电极,并且在介电型EAP 材料内有预拉应力,两侧并未施加电压。如图2所示,在柔性电极上施加激励电压后,此时在介电型EAP材料上的正负电荷相互吸引,产生电场,从而施加给介电型EAP 材料麦克斯韦应力的作用。由于介电型EAP 材料具有不可压缩的特性,因而在静电压力的作用下介电型EAP 材料沿着电场力方向的厚度会减小,面积会增大,发生形变[11]。在外加激励电压撤销后,静电压力随之消失,此时介电EAP 材料恢复到初始状态。这样就完成了介电型EAP 材料的一个工作循环,即通电→面积增大→断电→恢复到初始状态。通过多次的循环工作,实现了将电能转化为机械能[12],从而达到了对外做功的目的,为介电型EAP驱动器提供驱动力。
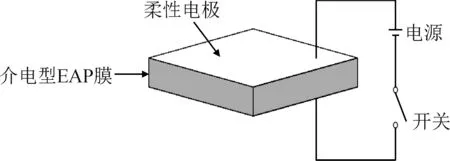
图1 断电状态Fig.1 Power off state

图2 通电状态Fig.2 Power-on state
介电型EAP 材料由于具有不可压缩性,因而在通电后在介电型EAP 材料上产生的静电压力的计算公式表示为[13]
式中:U为施加的静电电压,kV;h为介电型EAP材料的厚度,m;εr为介电型EAP 材料的相对介电常数(一般取4.7),ε0为真空介电常数(8.85×10-12F/m)。
介电型EAP 圆柱形驱动器工作原理如图3 所示。将介电型EAP 膜进行预拉伸后,膜内具有预拉应力,同时将弹簧进行预压缩。将预拉伸后介电型EAP 膜配合柔性电极逐层卷绕到压缩弹簧上,并且两端用固定头进行固定,此时介电型EAP 膜内预拉应力和弹簧的恢复力(F3)相平衡。在通电情况下,介电型EAP 膜发生形变,面积变大,此时膜内拉应力减小,圆柱形驱动器在弹簧恢复力的作用下纵向伸长,同时向外输出力;断电后,介电型EAP 膜恢复形变,膜内的拉应力恢复,使弹簧发生回缩现象,从而圆柱形驱动器恢复原状,通过不断的重复这个过程,实现驱动的对外的做功。F1,F2分别为介电型EAP 膜在断电状态与通电状态时的力-位移曲线。断电状态时,在1 位置时弹簧恢复力(F3)与EAP 膜上的内力相平衡,通电状态时,在2 位置时弹簧恢复力(F3)与EAP 膜上的内力相平衡。A 与B 之间的距离为圆柱形驱动器的输出位移,弹簧恢复力(F3)与F2之间力的差值就是圆柱形驱动器在通电状态下的输出的力。

图3 圆柱形驱动器的工作过程Fig.3 Working process of cylindrical actuator
2 试验准备
2.1 试验原理
如图4 所示,试验需要用到的仪器有介电型EAP 圆柱形驱动器、力值传感器、力值显示仪、高频录像仪、电源等。在驱动器工作时,通过压力传感器[14-15]来测量驱动器输出侧向偏转力,通过高频录像仪来测量确定输出的侧向弯曲角度,从而获得试验数据。在进行试验时为避免测量误差对试验造成的不良影响,因此在试验测量过程中,会剔除掉不合理数据,并且采用多组测量数据取平均值的方法,来消除测量误差的影响。
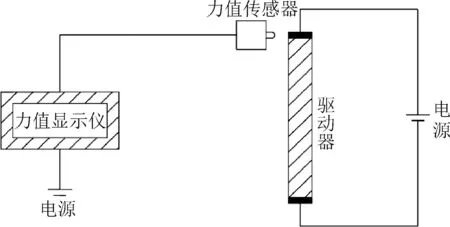
图4 试验原理示意图Fig.4 Schematic diagram of test principle
2.2 驱动器的制作
介电型EAP 圆柱形驱动器的制作零件有介电型EAP 膜、柔性电极、电极引线、压缩弹簧、固定头、扎条、热缩套管等,介电型EAP 圆柱形驱动器结构如图5所示,制作过程中使用的工具如图6所示。

图6 制作工具Fig.6 Making tools
介电型EAP圆柱形驱动器的制作过程如下:
1)介电型EAP膜的拉伸铺展
拉伸时,先用短压紧条固定在EAP 膜纵向的两端,进行纵向拉伸,并将其锁紧固定在拉伸板上;接着用长压紧条固定EAP 膜横向两端进行横向的拉伸,将其锁紧固定在拉伸板上,从而完成了介电型EAP膜的拉伸铺展过程。
2)组装驱动器框架结构
选用适合的螺母和螺杆作为圆柱形驱动器的支撑固定装置,将压缩弹簧套在螺杆上,两端固定头与压缩弹簧相嵌合,并用螺母配合螺杆进行弹簧的压缩,避免出现压缩弹簧失稳现象。
3)介电型EAP膜卷绕
卷绕时将驱动器框架结构放在拉伸铺展后EAP 膜的一端,沿着纵向用手术刀逐渐划开EAP膜,同时进行EAP 膜的卷绕,将EAP 膜均匀的卷绕到驱动器框架结构的固定头和压缩弹簧上,直到达到目标卷绕层数。在卷绕过程中一定要小心,避免EAP膜发生损坏。
4)涂抹柔性电极与安装电极引线
在介电型EAP 膜逐层卷绕的过程中,将柔性电极用软毛笔刷逐层均匀的涂抹在EAP 膜上。并同时逐层的安装好柔性电极引线,需要注意安装电极引线时避免对EAP膜造成损坏,而导致短路。
5)介电型EAP膜两端固定
为避免圆柱形驱动器两端的EAP 膜发生脱落回缩现象,导致圆柱形驱动器的损坏,需要将圆柱形驱动器的两端进行固定处理。处理措施有:其一设计凹槽式固定头,配合扎紧条,对EAP 膜进行了扎紧固定。其二利用热缩套管的热收缩性,对圆柱形驱动器的端部进行固定处理,制作好的介电型EAP圆柱形驱动器如图7所示。

图7 制作好的介电型EAP圆柱形驱动器Fig.7 Fabricated dielectric EAP cylindrical actuator
3 试验测量和数据分析
3.1 试验测量
介电型EAP 圆柱形驱动器输出的侧向偏转力和侧向弯曲角度受到多种因素的影响。本试验过程选择了4 种类型的弹簧规格,具体参数见表1,通过试验测量不同影响因素作用时,驱动器输出的试验数据,如图8和图9所示。

表1 弹簧规格参数Tab.1 Spring specifications

图8 测量侧向偏转力Fig.8 Measurement of lateral deflection force

图9 测量侧向弯曲角度Fig.9 Measurement of lateral bending angle
3.2 数据分析
3.2.1介电型EAP膜拉伸面积比例的影响
试验中,控制介电型EAP 膜不同的拉伸面积比例,通过测量获得的试验数据,探究其对介电型EAP 圆柱形驱动器的侧向输出性能的影响。下面对介电型EAP膜拉伸比例的影响进行试验测试。
分析处理试验测量获得的数据,由图10 和图11 可知,介电型EAP 圆柱形驱动器输出的侧向偏转力和侧向弯曲角度,总体呈现出前期随着介电型EAP 膜拉伸面积比例的增大而逐渐增大,但输出的侧向片偏转力不能一直增大,后续会出现下降的趋势。
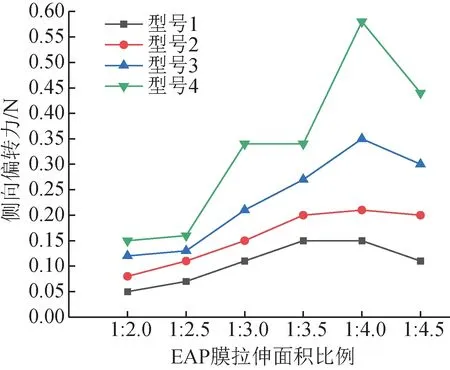
图10 EAP膜拉伸面积比例对侧向偏转力的影响曲线Fig.10 Influence curve of tensile area ratio of EAP film on lateral deflection force
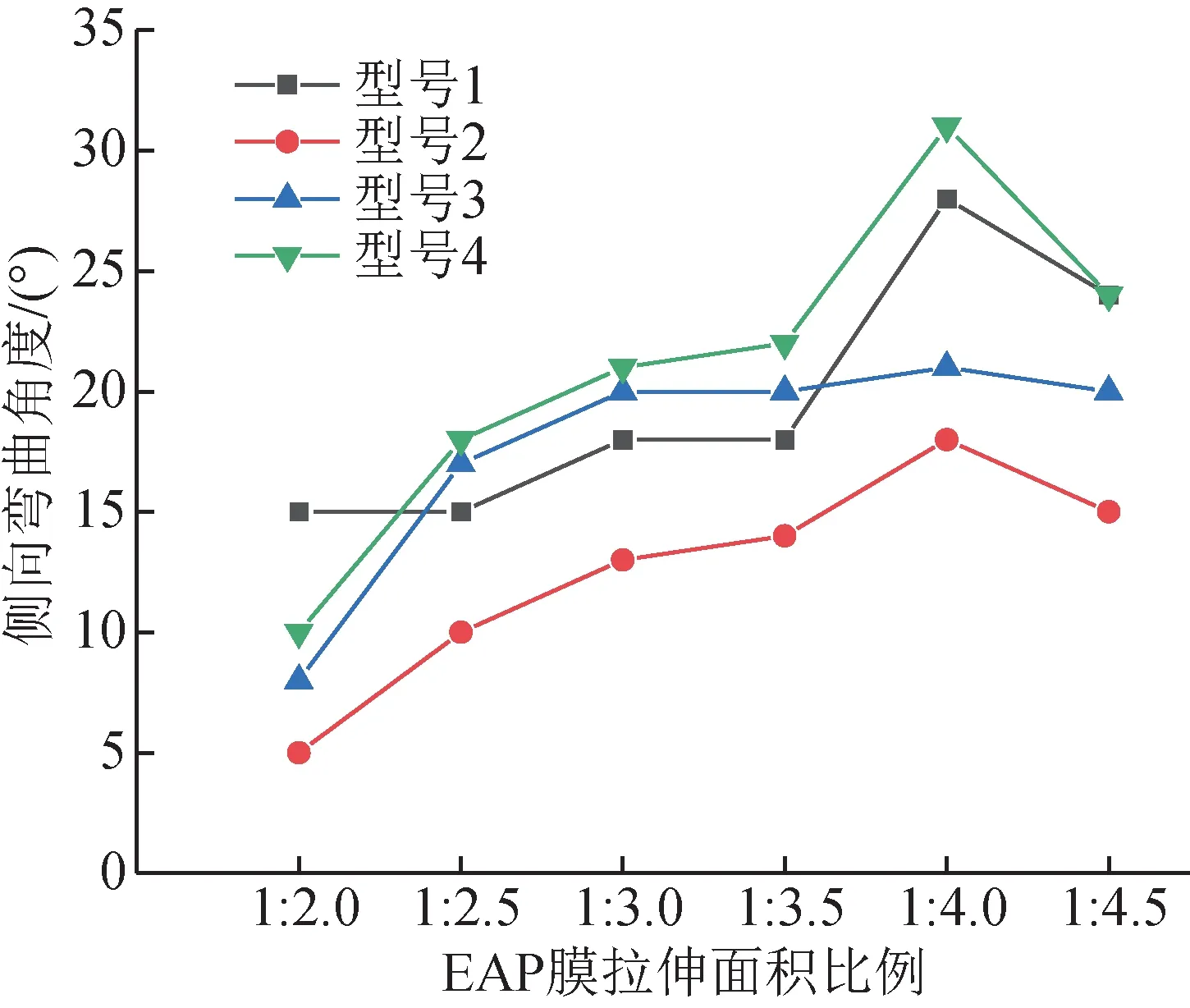
图11 EAP膜拉伸面积比例对侧向弯曲角度的影响曲线Fig.11 Influence curve of tensile area ratio of EAP film on lateral bending angle
前期增大,主要是因为EAP 膜拉伸面积比例越大,此时EAP 膜的厚度越小,由介电型EAP 材料上产生的静电压力计算公式可知,当EAP 膜的厚度越小时,产生的静电压力越大,从而使输出的侧向偏转力和侧向弯曲角度增大。后续出现下降的趋势,主要是因为此时EAP 膜厚度过于小,在制作过程中极其容易出现损伤,并且在测试过程中容易发生电压的击穿破坏,导致试验数据变小,因此拉伸面积比例过大时,不再适合介电型EAP圆柱形驱动器的制作。
3.2.2介电型EAP膜卷绕层数的影响
在本试验中,控制介电型EAP 膜在圆柱形驱动器上的卷绕层数,通过测量获得试验数据,来探究其对介电型EAP 圆柱形驱动器的侧向输出性能的影响。下面对介电型EAP 膜卷绕层数的影响进行了试验测试。
分析处理试验测量获得的数据,由图12可知,当EAP 膜卷绕层数在合理范围内时,介电型EAP圆柱形驱动器输出的侧向偏转力,总体上随着介电型EAP 膜卷绕层数的增多而逐渐增大;由图13可知,介电型EAP 圆柱形驱动器输出的侧向弯曲角度,先随着介电型EAP 膜卷绕层数的增多而逐渐增大,后逐渐减小。

图12 EAP膜卷绕层数对侧向偏转力的影响曲线Fig.12 Influence curve of number of winding layers of EAP film on lateral deflection force

图13 EAP膜卷绕层数对侧向弯曲角度的影响曲线Fig.13 Influence curve of number of winding layers of EAP film on lateral bending angle
介电型EAP 圆柱形驱动器输出的侧向偏转力逐渐增大是因为每一层介电型EAP 膜都可以产生静电压力,介电型EAP 膜卷绕的层数越多总的静电压力越大,因此驱动器输出的侧向偏转力越大;介电型EAP 圆柱形驱动器输出的侧向弯曲角度先逐渐增大后逐渐减小是因为初期侧向偏转力逐渐增大,在其作用下使侧向弯曲角度增大,后期由于卷绕的介电型EAP 膜层数过多,使驱动器过于臃肿,从而限制了驱动器侧向弯曲,因此导致后期输出的侧向弯曲角度逐渐减小。
3.2.3柔性电极涂抹面积比例的影响
在本试验中,控制柔性电极涂抹在介电型EAP 圆柱形驱动器一圈的面积比例,通过测量获得试验数据,来探究其对介电型EAP 圆柱形驱动器输出的侧向性能的影响。下面对柔性电极涂抹面积比例的影响进行了试验测试。
分析处理试验测量获得的数据,由图14 和图15 可知,介电型EAP 圆柱形驱动器输出的侧向偏转力和侧向弯曲角度,总体呈现出前期随着柔性电极涂抹面积比例的增大而逐渐增大,但当面积比例超过1/2 时,驱动器输出的侧向偏转力和侧向弯曲角度会逐渐减小。
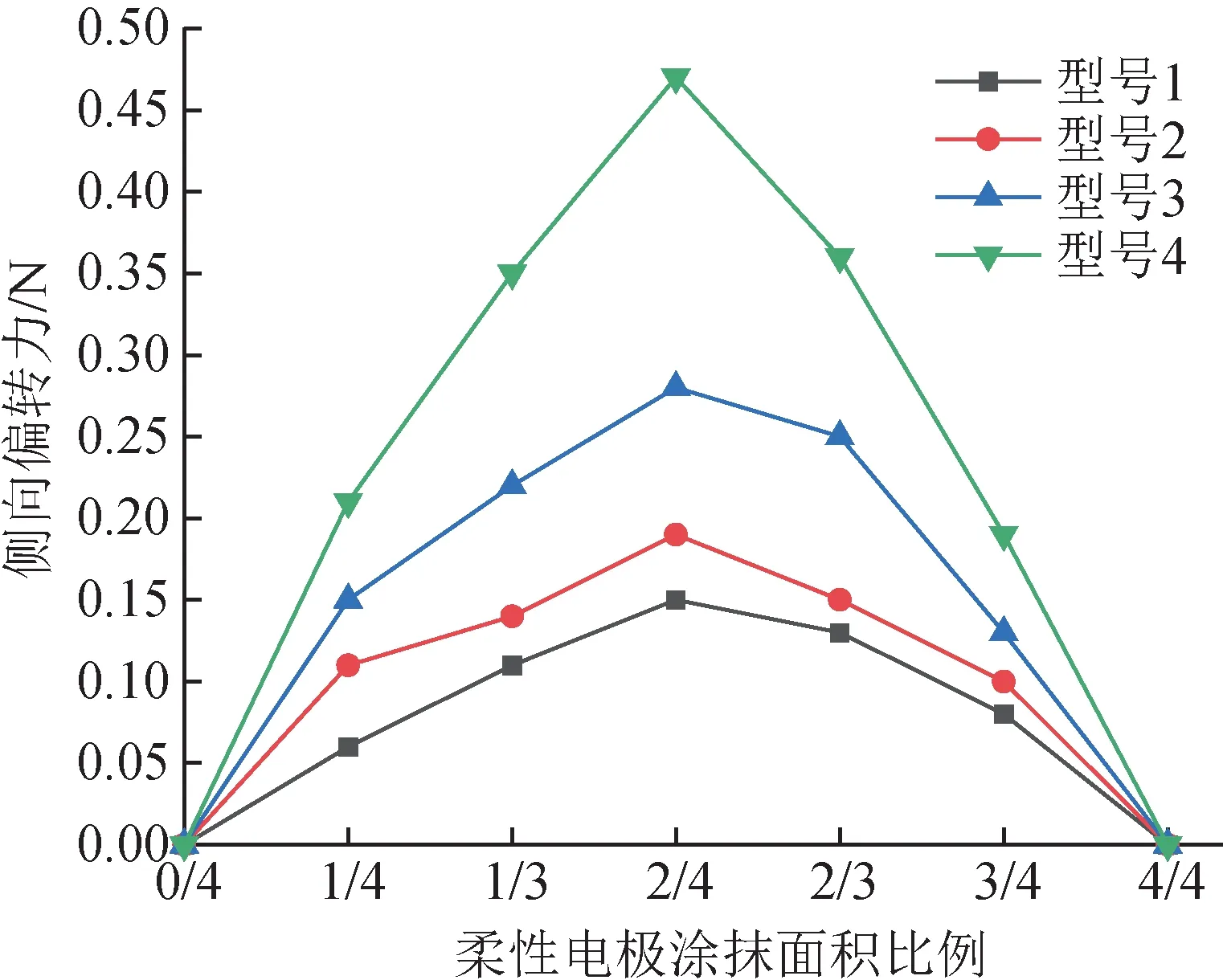
图14 柔性电极涂抹面积比例对侧向偏转力的影响曲线Fig.14 Influence curve of flexible electrode coating area ratio on lateral deflection force

图15 柔性电极涂抹面积比例对侧向弯曲角度的影响曲线Fig.15 Influence curve of flexible electrode coating area ratio on lateral bending angle
出现上述现象的原因是因为,介电型EAP 圆柱形驱动只有在涂抹柔性电极的部分才会产生静电压力从而使驱动器输出侧向性能,因此前期随着柔性电极涂抹面积比例的增大从而使驱动器输出的侧向性能增大,当柔性电极涂抹比例超过1/2时,作用在驱动器上的静电压力会相互抵消,因此驱动器输出的侧向性能会逐渐减小。
4 结论
文章基于介电弹性体材料的电致动特性,深入研究了影响介电型EAP 圆柱形驱动器输出侧向性能的因素,为后续介电型EAP 圆柱形驱动器的制作、研究和应用打下了一定的基础。在介电型EAP 圆柱形驱动器侧向输出性能试验中,利用数据采集装置,获得了丰富的试验数据,得到了介电型EAP 圆柱形驱动器在介电型EAP 膜拉伸面积比例、介电型EAP 膜卷绕层数和柔性电极涂抹面积比例影响因素作用下,其输出的侧向偏转力和侧向弯曲角度的变化趋势。
对于介电型EAP 圆柱形驱动器,当介电型EAP 膜拉伸面积比例逐渐增大时,其输出的侧向偏转力和侧向弯曲角度会呈现出先逐渐增大后逐渐减小的趋势;当介电型EAP 膜卷绕层数逐渐增多时,其输出的侧向偏转力会逐渐增大,输出的侧向弯曲角度会呈现出先逐渐增大后逐渐减小的趋势;当柔性电极涂抹面积比例逐渐增大时,输出的侧向偏转力和侧向弯曲角度会呈现出先逐渐增大后逐渐减小的趋势。
文章只探究了部分影响因素对介电型EAP 圆柱形驱动器输出的侧向性能的影响。后续还可以进一步探究其他影响因素对介电型EAP 圆柱形驱动器侧向性能的影响,推动其不断向前发展。